

Обратная задача кинематики
заключается в том, чтобы по известному значению ускорения a(t) найти скорость точки и восстановить
траекторию движения r(t). |
d (t) |
|
|
||||||
По определению |
|
a(t) |
|
dt |
|
, |
|
||
Отсюда |
|
|
|
|
|
|
|
t2 |
|
|
(t) 0 |
(t0 ) a(t)dt |
|
||||||
|
|
|
|||||||
|
|
|
|
|
|
|
|
t1 |
|
|
|
dr |
, |
|
|
|
|
|
|
или, так как |
|
(t) dt |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
0 |
|
0 |
|
t2 |
||||
|
|
|
|
||||||
Следовательно |
r(t) r (t |
|
) (t)dt. |
||||||
|
|
|
|
|
|
|
t1 |
||

Кинематика криволинейного движения
Введем единичный вектор τ , связанный с точкой 1
и направленный по касательной к траектории
движения точки 1 (векторы и τ в точке 1
совпадают).
Тогда можно записать:
V V ;
|
|
d |
|
dV |
|
d |
|
|
||
a |
|
|
V |
|
V |
|
a an ; |
|||
dt |
dt |
dt |
||||||||
|
|
|
|
|
|
|
||||

ТАНГЕНЦИАЛЬНОЕ УСКОРЕНИЕ
Тангенциальное ускорение характеризует изменение скорости по величине.
a 0; |
a 0; |
|
|
a a ; a dVdt V ;

НОРМАЛЬНОЕ УСКОРЕНИЕ
Нормальное ускорение характеризует изменение скорости по направлению.
При V = const → | |= 2V sin(
|= 2V sin( )
)
|
|
|
|
|
lim |
|
V |
|
|
lim |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
t |
= |
|||
|
|
|
|
an = a = t 0 |
t 0 |
|||||
|
|
|
|
т.к. |
тогда |
|
|
и sin( ) |
||
an = |
lim |
V |
= |
|
|
|
|
|
|
|
t 0 |
t |
|
|
|
|
|
|
|||
= V |
lim |
|
= V |
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|||
t 0 |
|
|
|
|
|
|
|
|||

Степень искривленности плоской кривой характеризуется кривизной С.
Радиус кривизны R
– радиус такой окружности, которая сливается с кривой в данной точке на бесконечно малом ее участке dS.
R |
1 |
lim |
|
C |
|||
|
0 |
R R
S dS .
d

Модуль нормального ускорения
an lim |
|
|
V lim |
|
S |
|
|
V |
|
|
S |
|
|||
t 0 |
t |
t 0 |
t |
|
|||
V lim |
|
|
lim |
|
S |
1 |
V 2 |
|
|
|
|
|
V |
V |
R |
||
t 0 |
S |
t 0 |
t |
R |
|
|||
V 2 |
n |
Нормальное ускорение или |
an R |
центростремительное , |
т.к. направлено оно к центру кривизны, перпендикулярно V
n - единичный вектор нормали к касательной

Полное ускорение
V const
|
a a a |
|
|
V |
|
|
; |
|
|
|
|
|
||
|
n |
V |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
an V n V |
|
n; |
|
|
||||||||||
2 |
2 |
|
2 |
|
2 |
2 |
|
|
2 |
|
V 4 |
|
; |
|
a an |
a |
V |
|
|
V |
V |
|
R |
2 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
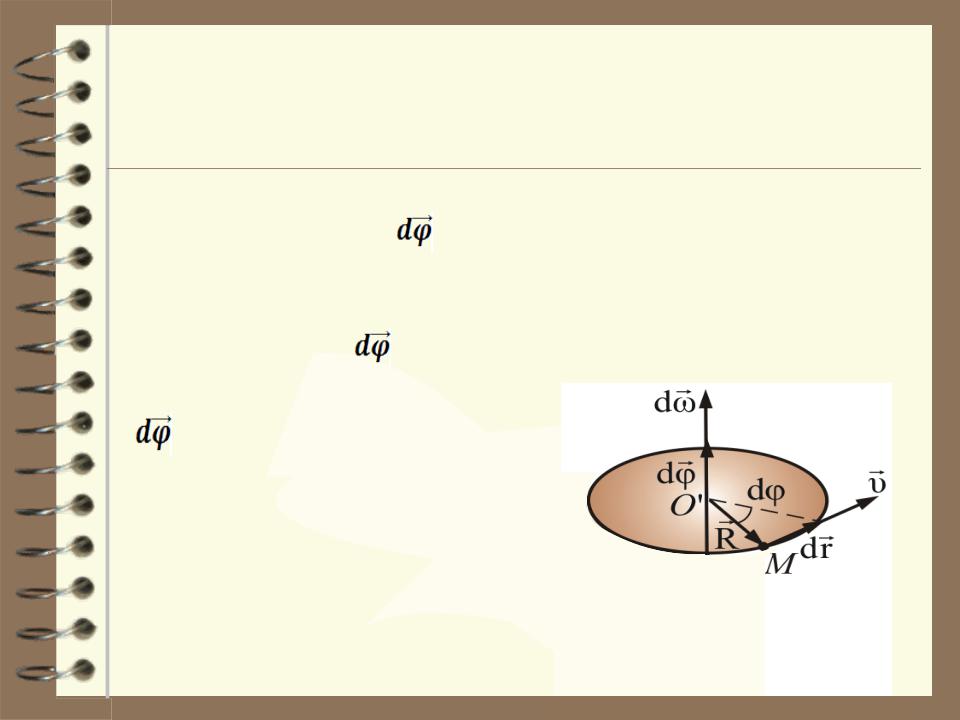
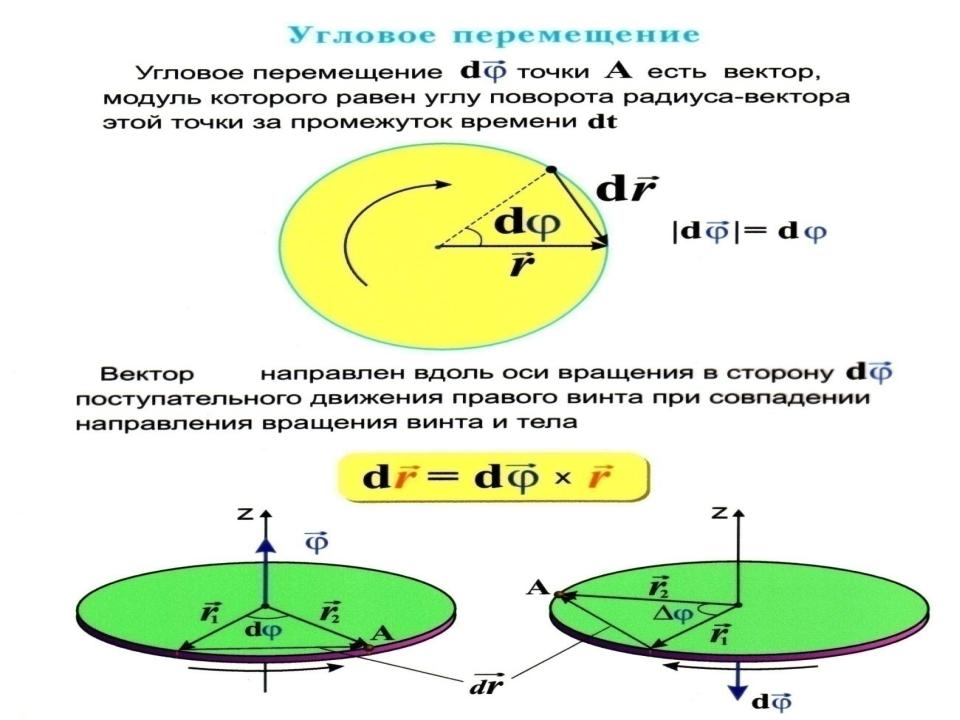
УГЛОВАЯ СКОРОСТЬ
Угол поворота dφ характеризует перемещения точки М за время dt ( угловой путь )
Удобно ввести – вектор элементарного поворота тела, численно равный dφ и направленный вдоль оси вращения так, чтобы глядя вдоль вектора мы видели вращение по часовой стрелке ( направление вектора
и направление вращения связаны правилом
буравчика).

Угловой скоростью  называется вектор
называется вектор
численно равный первой производной от угла поворота по времени и направленный вдоль оси вращения в направлении  (
(  и
и  всегда направлены в одну сторону).
всегда направлены в одну сторону).
dφ
ω
dt
Модуль угловой скорости
ω ddφt .