

22
6.Контрольные вопросы, выносимые на защиту работы
6.1.Понятие промышленного робота и манипулятора.
6.2.Классификация промышленных роботов.
6.3.Основные понятия и определения робототехники.
6.4.Применяемые системы координат «руки» манипулятора.
6.5.Обозначения структурно-кинематических схем ПР.
6.6.Крепление промышленных роботов.
6.7.Этапы и основные способы построения структурно-кинематических
схем ПР.
Лабораторная работа № 2
Построение рабочей зоны промышленного робота
Цель работы: разработка схем рабочей зоны промышленного робота.
Рабочая зона ПР – пространство, в котором может находиться рабочий орган манипулятора при выполнении работы.
Рабочую зону характеризуют линейные(поступательные) и угловые (вращательные) перемещения подвижных звеньев манипулятора. Конфигурация и размеры рабочей зоны ПР определяются размерами, формой и расположением рабочих и технологических позиций обслуживаемого оборудования.
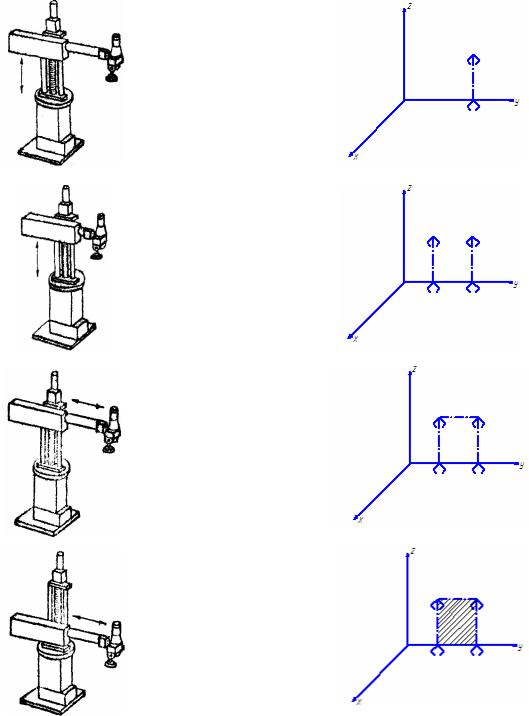
Примеры построения рабочей зоны ПР приведены в табл. 1 и 2.
Таблица 1
Структурное построение рабочей зоны ПР
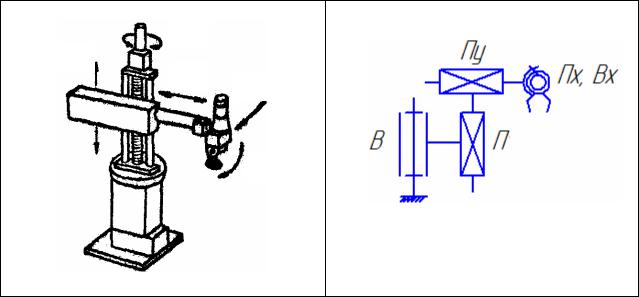
Bz
Пz
Пy
Пx
Bx
КП/2В3П/-х Переносные степени подвижности: Вz,
Пz, Пу, ориентирующие - Пх, Вх.
23
|
|
|
|
|
|
Продолжение табл. 1 |
|
движеСтепень- |
ния |
Передвижение манипулятора |
Характер пере- |
Этапы построения рабочей зо- |
|
||
по степеням подвижности |
мещения |
Символ |
ны |
|
|||
|
|
|
|
||||
|
|
|
Виды дви- |
|
|
|
|
|
|
|
жения |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
2 |
3 |
|
4 |
5 |
|
1. |
|
|
Возвратно |
|
Пz |
|
|
|
|
|
поступа- |
|
|
|
|
|
|
|
тельное |
|
|
|
|
|
|
|
относи- |
|
|
|
|
|
|
|
тельно оси |
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
2. |
|
|
- |
|
Пz |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
3. |
|
|
Возвратно |
|
|
|
|
|
|
|
поступа- |
|
Пу |
|
|
|
|
|
тельное |
|
|
|
|
|
|
|
относи- |
|
|
|
|
|
|
|
тельно оси |
|
|
|
|
|
|
|
у |
|
|
|
|
|
|
|
|
|
|
|
|
4. |
|
|
- |
|
Пу |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
24
Окончание табл. 1
5. |
|
Враща- |
Вz |
|
|
|
тельное |
|
|
|
|
относи- |
α= |
|
|
|
тельно оси |
180° |
|
|
|
z |
|
|
|
|
|
|
|
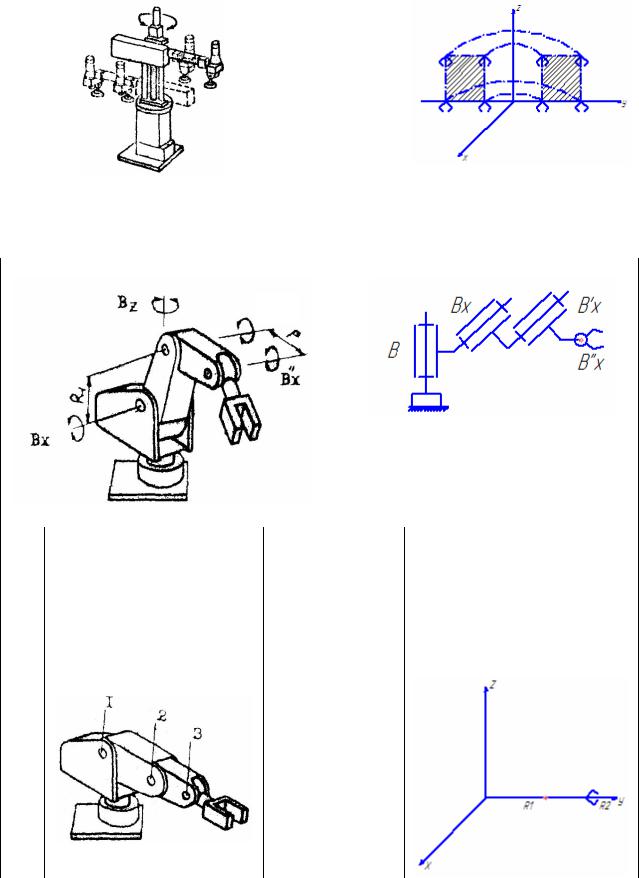
Таблица 2
Структурное построение рабочей зоны ПР
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Bz |
|
B¢x |
|
|
|
|
|
|
|
|
|
|
|
R2 |
|
z |
||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B¢¢x |
|
|
|
|
R1 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Bx |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ОП/4В/+у |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Переносные степени подвижности: |
|
|
|
|
|
|
|
|
|
|
|
Вz,Вх, В¢х, ориентирующие - B²х. |
|
|
|
|
|
|
|
|
|
|
|
|
Степень движения |
Передвижение манипулятора |
Характер пере- |
Этапы построения рабочей зо- |
||
по степеням подвижности |
мещения |
|
ны ПР |
||
|
Виды дви- |
|
Символ |
|
|
|
жения |
|
|
||
|
|
|
|
||
|
|
|
|
|
|
1 |
2 |
3 |
|
4 |
5 |
1. |
|
Исходное |
|
|
|
|
|
положение |
|
|
|
|
|
|
|
|
|

25
Окончание табл. 2
2. |
|
Враща- |
Вх |
|
|
|
тельное в |
|
|
|
|
шарнире I |
Вх= |
|
|
|
относи- |
45° |
|
|
|
тельно оси |
|
|
|
|
х |
|
|
|
|
|
|
|
3. |
|
Враща- |
|
|
|
|
тельное в |
В¢х |
|
|
|
шарнире 2 |
В¢х= |
|
|
|
относи- |
90° |
|
|
|
тельно оси |
|
|
|
|
х |
|
|
|
|
|
|
|
4. |
|
Враща- |
Вх |
|
|
|
тельное в |
|
|
|
|
шарнире I |
Вх= |
|
|
|
относи- |
45° |
|
|
|
тельно оси |
|
|
|
|
х |
|
|
|
|
|
|
|
5. |
|
Враща- |
Вz |
|
|
|
тельное |
|
|
|
|
относи- |
Вz |
|
|
|
тельно оси |
= |
|
|
|
z |
180° |
|
|
|
|
|
|
26
1.Задание по работе
1.1.Ознакомиться со способами построения рабочей зоны ПР.
1.2.Разработать схему рабочей зоны ПР по заданию преподавателя.
2.Содержание отчета
2.1.Название и цель работы.
2.2.Примеры структурных построений рабочих зон ПР.
2.3.Схема рабочей зоны ПР согласно варианту задания(предварительно построить структурно-кинематическая схему ПР):
Вариант |
1 |
2 |
3 |
4 |
5 |
Формула |
2П/ПРТ/-Z |
1В1П/КП/+Y |
1В1П/ПТ/-Z |
2В/СК/-Z |
3П/СК/-Х |
|
|
|
|
|
|
Вариант |
6 |
7 |
8 |
9 |
10 |
Формула |
1В2П/СК/+Y |
1В2П/ОП/-Z |
1В2П/КП/+Y |
2В1П/СК/-Х |
2В1П/ПРТ/+Y |
Вариант |
11 |
12 |
13 |
14 |
15 |
Формула |
3П/ПРТ/-Z |
2В1П/ПТ/-Z |
1В2П/ПТ/-Z |
2В/ПТ/+Y |
2В/ОП/+Х |
Вариант |
16 |
17 |
18 |
19 |
20 |
Формула |
1В1П/СК/-Х |
3В/ОП/-Y |
4П/ОП/-Z |
1В3П/ОП/+Y |
2В/ОП/+Z |
3.Контрольные вопросы, выносимые на защиту работы
3.1.Определение рабочей зоны промышленного робота.
3.2.Этапы построения рабочей зоны.
Лабораторная работа № 3
Изучение устройства и конструкции робота-штабелера
Цель работы: ознакомление с электрической схемой, тумблерами управления, приобретение практических навыков управления роботом.
1. Описание робота-штабелера
Робот-штабелер предназначен для погрузки и разгрузки плитных материалов. Его основными элементами являются шкаф автоматики1, пульт ручного управления 2, манипулятор 3, корзина захвата 4, двигатели 5 (рис. 1).
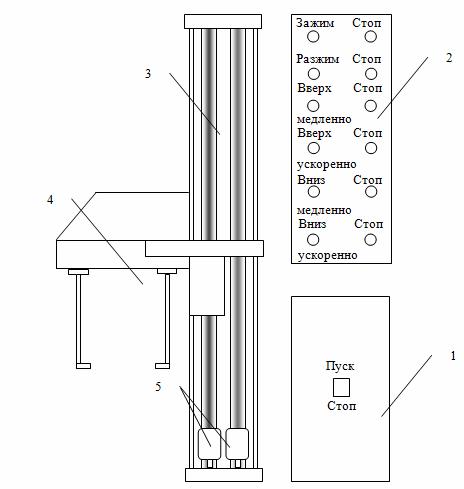
27
Рис. 1. Схема промышленного робота
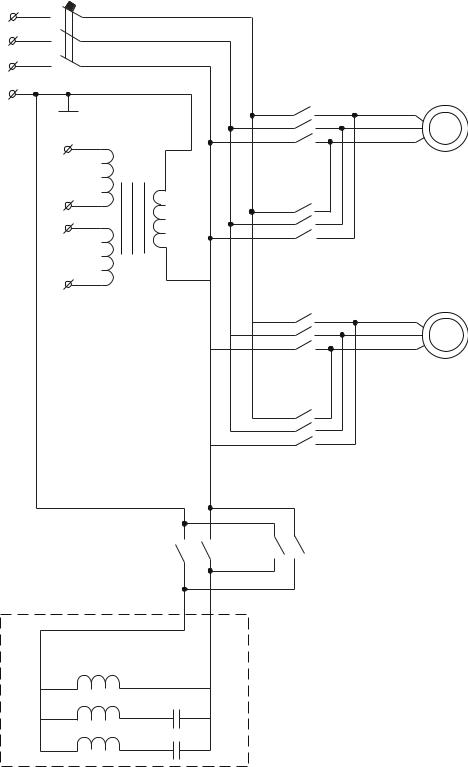
2. Описание электрической схемы и тумблеров управления.
Автомат А1, расположенный на двери электрического шкафа, подает напряжение на робот (рис. 2).
Питание схемы управления осуществляется от трансформатора, Т
1
имеющего выводы на 127 В и 220 В.
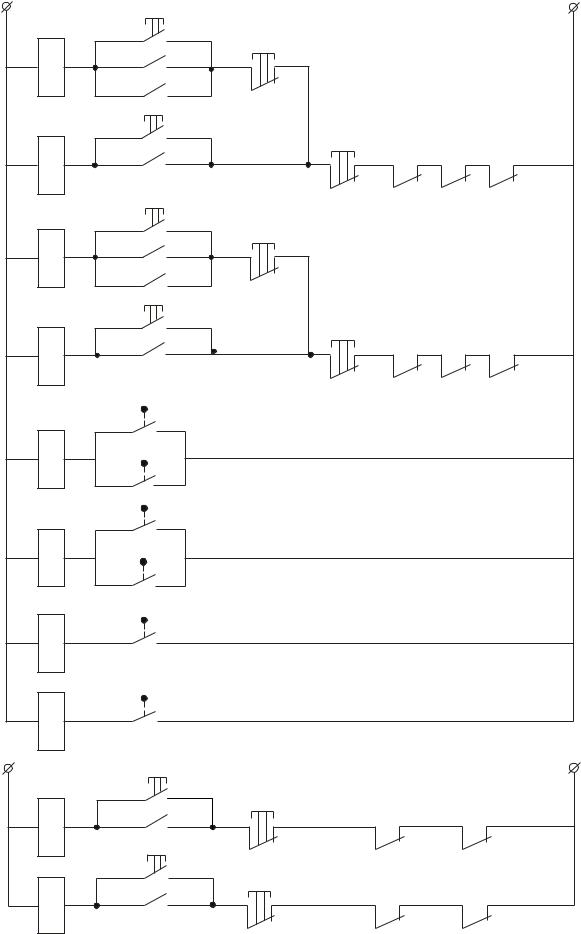
Кнопки управления роботом S1 ¸ S8 и S15 ¸ S18 (рис. 3) расположены на выносном пульте управления (рис. 1).
При нажатии кнопки S1 катушка пускателя К1 оказывается под напряжением и замыкает контакты К1, при этом двигатель М1 получает питание и происходит движение каретки вверх. Кнопка S1 блокируется нормальноразомкнутым контактом К1.1 пускателя К1. Кнопка S2 осуществляет остановку движения каретки вверх.
При нажатии кнопки S3 катушка К2 получает питание и происходит пуск двигателя М2, при этом каретка перемещается вверх от двух двигателей, т.к. в цепи катушки К1 находится нормально-разомкнутый контакт катушки К2. Ос-
28
тановка ускоренного подъема от двух двигателей производится нажатием кноп-
ки S4.
На вертикальной стойке робота текстолитовые пластинки, а на каретке конечные выключатели S9 и S10 выплняют роль ограничения движения каретки вверх. При их срабатывании катушка К5 получает питание и разрывает свой нормально-замкнутый контакт в цепи катушек К1 и К2, при этом происходит остановка двух двигателей при их работе на подъем каретки.
Аналогичным образом работает схема перемещения каретки вниз. Конечные выключатели S11 и S12 предусмотрены для останова каретки в нижней точке.
При нажатии кнопки S15 происходит сжимание корзины, т.к. катушка К9 получает питание и кнопка S15 блокируется нормально-разомкнутым контактом К9.1. Остановка двигателя М3 осуществляется кнопкой S16. В схеме предусмотрены конечные выключатели, ограничивающие раскрытие и закрытие корзины (S13 и S14).
Расжимание корзины осуществляется при нажатии кнопки S17.
3.Задание по работе
3.1.Разобраться с работой электрической схемы и тумблерами управле-
ния.
3.2.Включить питание робота и выполнить возможные манипуляции с
захватом.
3.3.Измерить время и расстояние перемещения захвата, определить линейную скорость при движении вверх, вниз.
3.4.Определить коэффициент передачи: частота вращения двигателя - линейная скорость.
4.Содержание отчета
4.1.Начертить структурную схему робота.
4.2.Начертить электрическую схему с указанием кнопок неисправностей.
4.3.Указать на структурной схеме кнопки 9 - 14.
4.4.Определить и записать линейную скорость, коэффициент передачи.
5.Контрольные вопросы, выносимые на защиту работы
5.1. Условные обозначения элементов реле, кнопок и тумблеров включе-
ния.
5.2.Отличия принципа действия синхронных и асинхронных электродвигателей, какие двигатели использованы в работе.
5.3.Назначения двигателей М1 и М2.
5.4.Какие нарушения будут в работе робота при перегорании катушек или «залипании» контактных групп реле К1 – К4.
29
5.5.Объяснить назначение выключателей 9 и 10, показать их место расположения на роботе.
5.6.Какое напряжение считается безопасным для человека и почему?
A1
A ~380 B
C |
|
|
N |
K1 |
M1 |
|
T1 |
~127B |
K3 |
|
~220B
K2 |
M2 |
K4
K9 |
K10 |
M3
Рис. 2. Схема приводов промышленного робота
|
|
30 |
|
|
|
|
~127В |
S1 |
|
|
|
|
N |
|
|
|
|
|
|
|
К1 |
K1.1 |
S2 |
|
|
|
|
|
|
|
|
|
|
|
|
K2.2 |
|
|
|
|
|
K2 |
S3 |
|
|
|
|
|
K2.1 |
|
S4 |
|
|
K5 |
|
|
|
K3.2 K3.4 |
||||
|
|
|
||||
K3 |
S5 |
|
|
|
|
|
|
S6 |
|
|
|
|
|
|
K3.1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
K4.2 |
|
|
|
|
|
K4 |
S7 |
|
S8 |
|
|
|
|
|
K1.2 |
|
|
||
|
K4.1 |
|
K2.3 |
K6 |
||
|
|
|
||||
K5 |
S9 |
|
|
|
|
|
|
|
|
|
|
|
|
|
S10 |
|
|
|
|
|
K6 |
S11 |
|
|
|
|
|
|
|
|
|
|
|
|
|
S12 |
|
|
|
|
|
K7 |
S13 |
|
|
|
|
|
K8 |
S14 |
|
|
|
|
|
|
|
|
|
|
|
|
~220B |
S15 |
S16 |
|
|
|
N |
K9 |
K9.1 |
|
K10.2 |
K7 |
|
|
|
|
|
||||
K10 |
S17 |
|
|
|
|
|
|
S18 |
|
K9.2 |
K8 |
|
|
|
|
|
|
|||
|
|
|
|
|
||
|
K10.2 |
|
|
|
|
|
|
Рис. 3. Схема пульта управления ПР |
|
|
|||
31
Лабораторная работа № 4
Учебно-имитационная программа управления роботом-переносчиком грузовых складских контейнеров «ROBOTICS»
Цель работы: разработка программы автоматической переноски и загрузки контейнерами складского помещения.
1. Назначение программы
Учебно-имитационная программа«ROBOTICS» демонстрирует возможности роботоподобного механизма, предназначенного для переноски и оптимальной загрузки складского помещения прямоугольными контейнерами стандартной формы. На примере этой программы можно получить представление о системе управления промышленными роботами.
2. Описание аппаратно-программной среды
Программа «ROBOTICS» работает на любойIBM-совместимой ПЭВМ под операционной системойWindows. Наиболее выгодно с точки зрения быстродействия и графического интерфейса программа функционирует на процессоре Pentium и достаточном пространстве оперативной памяти. Программа написана на языкеTurbo Basic. Общий объем дисковой памяти программы ( .ехе -файл и .dat - файлы образов графических объектов) около
107,8Kb.
3. Описание работы программы
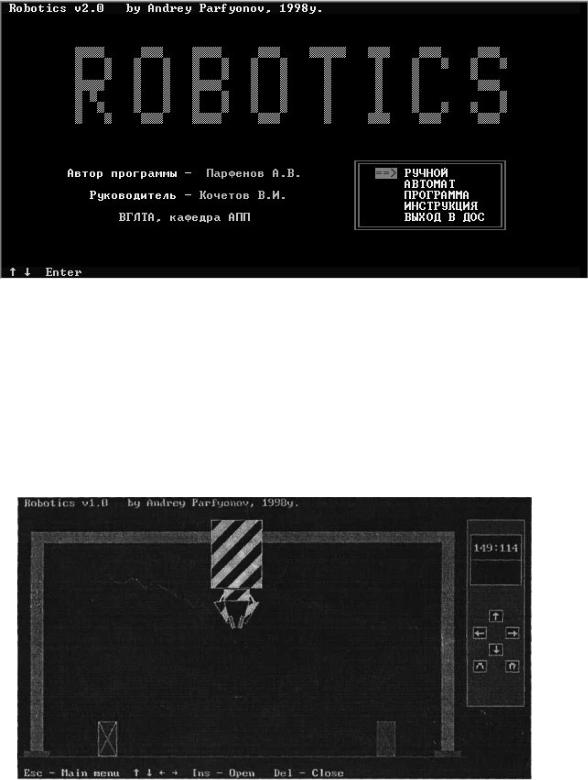
3.1. Главное меню
При запуске исполняемого файла ROBOTICS.EXE пользователь получает следующий экран (рис. 1):
32
Рис. 1. Экран выбора режимов работы программы
Мигающий курсор-стрелка в прямоугольнике в правой части экрана предоставляет возможность выбора режима работы.
3.1.1. Режим "РУЧНОЙ"
Наиболее нагляден на первых этапах ознакомления с программой режим "РУЧНОЙ". Его выбор приводит к основному экрану (рис. 2).
Рис. 2. Экран ручного режима работы
Робот представлен в виде строго горизонтально перемещаемого модуля с телескопическим манипулятором-захватом. Управление манипулятором производится с помощью клавиатуры. Действия, производимые роботом при нажатии клавиш, описаны в последней строке экрана. На "пульте управления", расположенном в правой части экрана, отображаются текущие {X;Y} – координаты ма-
33
нипулятора, а также нажатая в данный момент клавиша управления (изображена в инверсном виде).
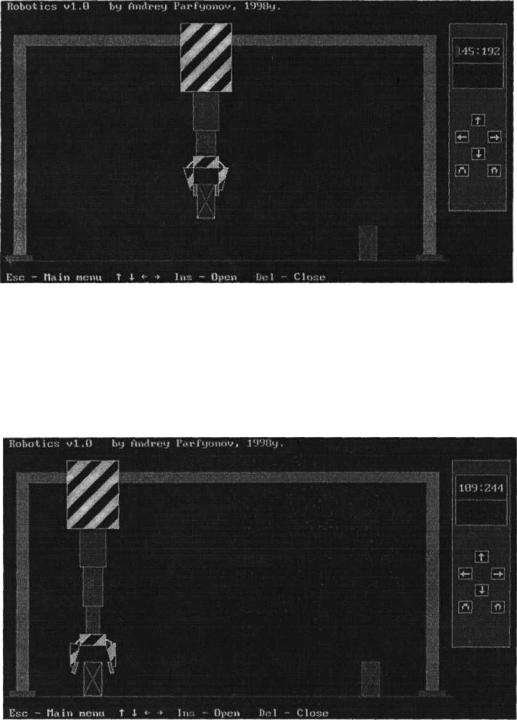
С помощью клавиш управления("стрелки влево-вправо") модуль позиционируется по горизонтали к нужному месту.
При нажатии и удержании клавиш"стрелки вверх-вниз" происходит вы- движение-втягивание телескопического захвата.
Захват раскрыватся нажатием клавиши <Insert>.
Рис. 3. Экран захвата контейнера в ручном режиме
Клавишей "стрелка-вниз" захват опускается на контейнер и по клавише <Delete> захватывает контейнер (рис. 3). Далее телескопический стержень захвата втягивается на нужную величину и груз перемещается к нужной позиции, где опускается с освобождением захвата (рис. 4).
Рис. 4. Перемешение контейнера к нужной позиции
34
Возможные критические ситуации, возникающие при работе с манипулятором, рассматриваются ниже в п. 3.2.
3.1.2. Режим "АВТОМАТ"
Управление манипулятором в режиме"АВТОМАТ" происходит по предварительно составленной в режиме "ПРОГРАММА" (и далее во внутреннем меню "РЕДАКТОР") программе. При выполнении заданной программы в прямоугольнике справа (имитация пульта управления) отображаются координаты манипулятора и выполняемая в данный момент команда программы. Прервать исполнение программы можно клавишей <Esc>.
3.1.3 Режим "ПРОГРАММА"
При выборе этого пункта в Главном меню пользователь получает -сле дующий экран и дополнительное меню:
РЕДАКТОР
ОЧИСТИТЬ
ПЕЧАТЬ
ВОЗВРАТ
3.1.3.1. РЕДАКТОР
Происходит переход в окно редактирования для создания программы. Программа состоит из строк, каждая из которых описывает одно элементарное действие, производимое роботом (рис. 5).
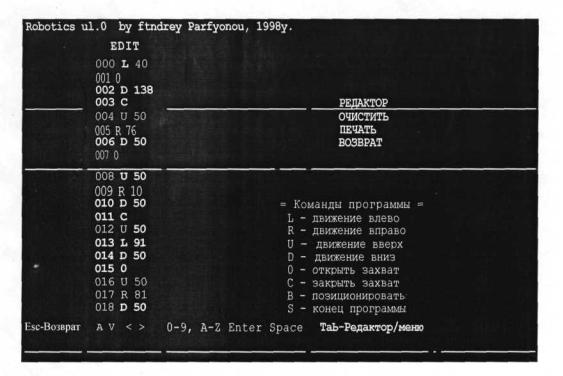
Рис. 5. Режим «РЕДАКТОР»
35
Числа в левой части окна– номера строк программы (000-499). Для команды отводится 5 знакомест, причем на первом месте может находиться только символ латинского алфавита или пробел.
Таким образом, структура команды:
Xn, где X - наименование команды, n – число, указывающее количество шагов, на которое перемещается манипулятор (для отдельных команд n может отсутствовать; пробел между X и n может также отсутствовать):
Un – движение манипулятора вверх (n – число, указывающее количество шагов);
Dn – движение манипулятора вниз; Rn – движение манипулятора вправо; Ln – движение манипулятора влево; О – открыть захват; С – закрыть захват;
В – позиционировать манипулятор в начальную точку с координатами
(149:114);
S – завершение программы.
Пример команды: L 20 – перемещение манипулятора влево на 20 единиц. Клавиши команд редактора:
Стрелки "вниз-вверх-вправо-влево" – перемещение курсора; <Enter> – переход в начало следующей строки;
<Esc> – возврат в дополнительное меню;
<Таb> – переключение между режимом РЕДАКТОР и дополнительным меню (активизируется после первого входа в редактор);
<Пробел> – удаление неверно введенного символа.
3.1.3.2. ОЧИСТИТЬ
Введенная программа удаляется из памяти. Внимание! Дополнительного подтверждения не запрашивается!
36
3.1.3.3. ПЕЧАТЬ
Введенная программа может быть распечатана на принтере.
3.1.3.4. ВОЗВРАТ
Переход в главное меню (аналог клавиши <Esc>).
3.1.4. Режим "ИНСТРУКЦИЯ"
Выводится инструкция. Листание страниц производится клавишами
<PageUp> и <PageDown>. <Esc> — Возврат в Главное меню.
3.1.5. ВЫХОД В ДОС.
Прекращение выполнения программы ROBOTICS, возврат в операционную систему.
3.2. Критические ситуации при работе в ручном и автоматическом режимах
Возможны следующие ситуации:
1.Попытка выйти за границы рабочей зоны манипулятора: в нормальном состоянии координата X находится в диапазоне
1.00 - 229, Y – в диапазоне 114 - 252.
2.Столкновение манипулятора с контейнером.
3.Столкновение захваченного объекта со свободным при движении манипулятора.
4.Попытка перемещения контейнера без отрыва от поверхности.