

14

 2
2 
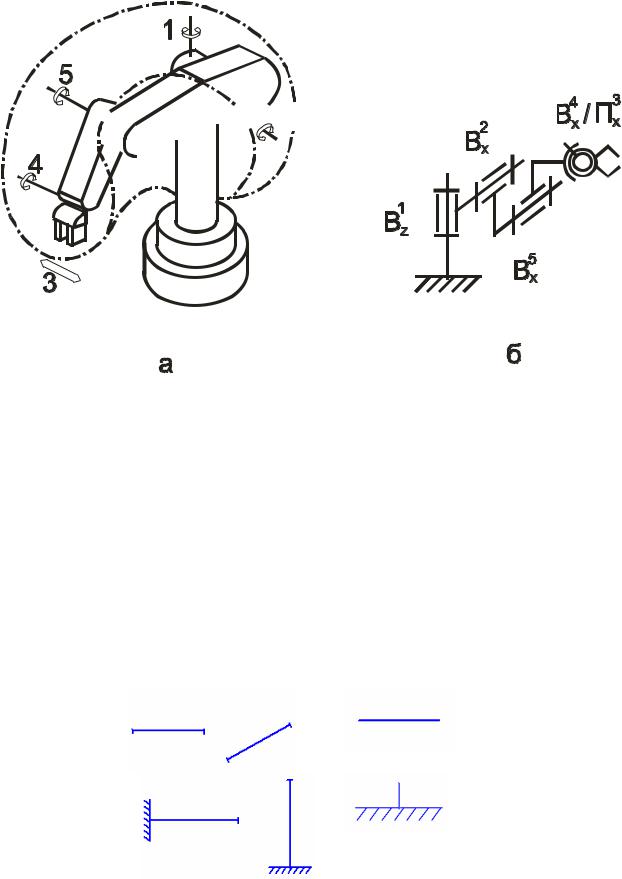
Рис. 10. Конструкция ПР, работающего в ангулярной системе координат, с рабочей зоной (а) и его структурно-кинематическая схема (б)
|
Обозначения структурно-кинематических схем ПР |
Таблица 3 |
||||
|
|
|
||||
|
|
|
|
|
|
|
Элементы |
Условные обозначения элементов |
Коли- |
|
Примечание |
||
структурно- |
|
|
чество |
|
|
|
Принятые в России |
Согласно |
|
|
|||
кинематических |
степе- |
|
|
|
||
|
стандарту JI5 |
|
|
|
||
и функциональ- |
|
ней |
|
|
|
|
|
0138 (Япония) |
|
|
|
||
ных схем ПР |
|
под- |
|
|
|
|
|
|
|
|
|
||
|
|
|
виж- |
|
|
|
|
|
|
ности |
|
|
|
|
|
|
ПР |
|
|
|
1 |
2 |
3 |
4 |
|
5 |
|
1. Звено (стер- |
|
|
|
|
|
|
жень) |
|
|
|
|
|
|
|
|
|
|
|
|
|
2. Неподвижное |
|
|
|
|
|
|
крепление звена |
|
|
|
|
|
|
|
|
|
|
|
|
|

|
|
15 |
|
|
|
|
|
|
|
|
Продолжение табл. 3 |
||
|
|
|
|
|
|
|
3. Жесткое (не- |
|
|
|
|
С целью уп- |
|
подвижное) со- |
|
|
|
|
рощения ино- |
|
единение: |
|
|
|
|
гда элемент |
|
а) звеньев |
|
|
|
|
жесткого со- |
|
|
|
|
|
|
единения не |
|
|
|
|
|
|
показывают, |
|
б) кинематиче- |
|
|
|
|
при этом не |
|
|
|
|
|
должен ме- |
|
|
ской пары и |
|
|
|
|
няться физи- |
|
звена |
|
|
|
|
ческий смысл |
|
в) двух кинема- |
|
|
|
|
кинематиче- |
|
тических пар |
|
|
|
|
ской пары и в |
|
|
|
|
|
|
целом струк- |
|
|
|
|
|
|
турной схемы |
|
|
|
|
|
|
|
|
4. Подвижное |
|
|
|
1 |
Обозначаются |
|
соединение воз- |
|
|
|
|
обычно пере- |
|
вратно- |
|
|
|
|
носные степе- |
|
поступательно- |
|
|
|
|
ни подвижно- |
|
го движения |
|
|
|
|
сти |
|
5. Винтовое со- |
|
|
|
2 |
Поступатель- |
|
единение по- |
|
|
|
|
ное и враща- |
|
ступательного и |
|
|
|
|
тельное дви- |
|
вращательного |
|
|
|
|
жения взаи- |
|
движения |
|
|
|
|
мосвязаны |
|
1 |
2 |
|
3 |
4 |
5 |
|
|
|
|
|
|
|
|
6. Цилиндриче- |
|
|
|
2 |
Поступатель- |
|
ское соедине- |
|
|
|
|
ное и враща- |
|
ние поступа- |
|
|
|
|
тельное дви- |
|
тельного и вра- |
|
|
|
|
жения незави- |
|
щательного |
|
|
|
|
симы |
|
движения |
|
|
|
|
|
|
7. Плоское |
|
|
|
1 |
Обозначаются |
|
шарнирное со- |
|
|
|
|
как правило, |
|
единение вра- |
|
|
|
|
переносные |
|
щательного |
|
|
|
|
степени под- |
|
движения во- |
|
|
|
1 |
вижности |
|
круг попереч- |
|
|
|
|
|
|
ной (а) и про- |
|
|
|
|
|
|
дольной (б) |
|
|
|
|
|
|
осей |
|
|
|
|
|
|
|
|
|
|
|
|
|

16
|
|
|
|
Окончание табл. 3 |
||
|
|
|
|
|
|
|
8. Соединение |
|
|
2 |
|
,, |
|
поступательно- |
|
|
|
|
|
|
го и вращатель- |
|
|
|
|
|
|
ного движения |
|
|
|
|
|
|
|
|
|
|
|
|
|
9. Соединения с |
|
|
2 |
|
,, |
|
двумя враща- |
|
|
|
|
|
|
тельными пере- |
|
|
|
|
|
|
мещениями: |
|
|
|
|
|
|
шаровой шар- |
|
|
|
|
|
|
нир с пальцем |
|
|
2 |
|
|
|
(а), шарнирные |
|
|
|
|
|
|
соединения (б) |
|
|
|
|
|
|
|
|
|
|
|
|
|
10. Соединения |
|
|
3 |
|
а) карданный |
|
с тремя враща- |
|
|
|
|
шарнир, шар- |
|
тельными пере- |
|
|
|
|
нир Гука |
|
мещениями |
|
|
3 |
|
б) зубчатая |
|
|
|
|
|
|
диф. передача |
|
|
|
|
|
|
|
|
11. Кинемати- |
|
|
1 |
|
Обозначение |
|
ческая пара с |
|
|
|
|
ориентирую- |
|
одной степенью |
|
|
|
|
щих степени |
|
подвижности |
|
|
|
|
подвижности |
|
|
|
|
|
|
|
|
12. Кинемати- |
|
|
2 |
|
,, |
|
ческая пара с |
|
|
|
|
|
|
двумя степеня- |
|
|
|
|
|
|
ми подвижно- |
|
|
|
|
|
|
сти |
|
|
|
|
|
|
13. Кинемати- |
|
|
3 |
|
,, |
|
ческая пара с |
|
|
|
|
|
|
тремя степеня- |
|
|
|
|
|
|
ми подвижно- |
|
|
|
|
|
|
сти |
|
|
|
|
|
|
14. Рабочий ор- |
|
|
|
|
|
|
ган: |
|
|
|
|
|
|
а) захватное |
|
|
|
|
|
|
устройство; |
|
|
|
|
|
|
б) технологиче- |
|
|
|
|
|
|
ский инстру- |
|
|
|
|
|
|
мент |
|
|
|
|
|
|

17
Таблица 4 Типы крепления ПР с элементами установок и условными обозначениями
Способ уста- |
Эскиз |
Условное обо- |
Символ |
новки (креп- |
|
значения |
|
ления) ПР |
|
|
|
1 |
2 |
3 |
4 |
1. Установка |
|
|
ОП |
на основании, |
|
|
|
на полу |
|
|
|
|
|
|
|
2. Установка |
|
|
КП (ПК) |
на колонне на |
|
|
|
полу |
|
|
|
|
|
|
|
3. Подвесной |
|
|
ПТ |
|
|
|
|
крепление к |
|
|
|
потолку |
|
|
|
|
|
|
|

18
Окончание табл. 4
СК
4. Крепление к стене на кронштейне
ПРТ
5. Пор-
тальный
Этапы и основные способы построения структурно-кинематических схем ПР приведены в табл. 5., при этом их правильность проверяется по трем условиям:
1.Структура ПР должна быть замкнутой, т.е. начинаем построение со способа крепления и установки (табл. 4), а заканчиваем рабочим органом.
2.У кинематической пары должен оставаться свободный соединительный элемент. Исключением является кинематическая пара портального крепления ПР, позволяющая последнему двигаться от одной стойки крепления к другой, а также различные виды шарнирных соединений (табл. 3).
3.Рабочий орган должен совершать все перемещения(степени подвижности), представленные на схеме.
Принцип построения структурно-кинематических схем ПР– после-
дующую кинематическую пару необходимо подсоединять к подвижному звену предыдущей.

19
Таблица 5 Этапы и способы построения структурно-кинематических схем ПР
|
|
|
|
|
|
|
|
|
|
|
|
1- |
крепление ПРОП |
|
||
|
|
|
Bz |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
Пy |
|
2- |
символическое (буквенное) обо- |
|||||
|
|
|
|
|
|
|
|
|
|
|
||||||
|
Пx |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
значение ПР2В3П: |
|
|||
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а) переносные степени подвижно- |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
сти – Пх, Вz, Пу,Пz; |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б) ориентирующие степени под- |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
вижностиВх |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
3- ориентация рабочего органа (ЗУ) |
|||
|
|
|
|
|
|
Пz |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
ПР –z |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Bx |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Передвижение манипуля- |
Си |
|
|
Способы построения структурно-кинематических схем |
||||||||||||
тора по степеням подвиж- |
мв |
|
|
|
|
|
|
|
ПР |
|
||||||
|
ности |
ол |
|
|
первый |
|
|
второй |
|
третий |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
2 |
3 |
|
|
|
4 |
|
5 |
||||||
1. |
|
|
|
|
|
Вz |
|
|
|
|
|
|
а) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б) |
|
|
– |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2. |
|
|
|
|
|
Пу |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3. |
|
|
|
|
|
Пх |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

20
Окончание табл. 5
4. |
Пz |
5. |
Вх |
4.Задание по работе
4.1.Ознакомиться с назначением и классификацией ПР.
4.2.Рассмотреть структуру робота с трехподвижным манипулятором.
4.3.Изучить основные понятия и определения робототехники.
4.4.Изучить используемые системы координат руки манипулятора.
4.5.Рассмотреть базовые компоновки ПР.
4.6.Научиться составлять структурно-кинематические схемы ПР.
5.Содержание отчета
5.1.Название и цель работы.
5.2.Таблица классификации роботов.
5.3.Робот с трехподвижным манипулятором.
5.4.Схемы систем координат руки манипулятора.
5.5.Схема ориентации кинематических пар и рабочего органа относительно осей координат.
5.6.Схемы ПР, работающих в прямоугольной, цилиндрической, сферической, ангулярной системах координат.
5.7.Обозначения структурно-кинематических схем ПР.
5.8.Таблица с типами крепления ПР с элементами установок и условными обозначениями.
21
5.9.Пример этапов и способов построения структурно-кинематических схем ПР.
5.10.Разработать структурно-кинематическую схему ПР согласно варианту задания:
Вариант |
1 |
2 |
3 |
Формула |
1В2П/ПРТ/-Z |
1В2П/ПРТ/-Z |
1В1П/ПРТ/-Z |
Формула |
1В3П/КП/+Y |
1В3П/ПТ/-Y |
1В2П/ПТ/+Y |
Формула |
1В1П/СК/+Y |
1В1П/СК/-Y |
1В2П/СК/+Х |
Формула |
ВхВzПyПzВyПx/ОП/+X |
A1вzB2пzС3вyD4вх/КП/–Z |
ВzВyПyПxВyПy/КП/–X |
Вариант |
4 |
5 |
6 |
Формула |
2В1П/ПРТ/-Z |
2В2П/ПРТ/-Z |
2В3П/ПРТ/-Z |
Формула |
1В1П/ПТ/+Z |
2В2П/ПТ/-Х |
2В2П/ПТ/+Х |
Формула |
2В/СК/-Z |
2П/СК/+Х |
2В1П/СК/+Y |
Формула |
ПyПyВzПzПxВz/СК/–Z |
ВyПyВzПxВyПz/КП/–Z |
ВzПyПxВzПyВy/СК/–Z |
Вариант |
7 |
8 |
9 |
Формула |
2В1П/ПРТ/-Х |
1В2П/ПРТ/+X |
1П/СК/+Y |
Формула |
2В2П/СК/-Y |
3В1П/КП/+Y |
3В2П/ОП/-Z |
Формула |
3В2П/ОП/-Z |
4В/КП/-Z |
1В3П/ПРТ/-Z |
Формула |
ВyПyПxВzПyВy/ПТ/+Y |
ПzВyПxВzПyВy/ОП/+Y |
ПzПzВyПyПxВy/ОП/+Z |
Вариант |
10 |
11 |
12 |
Формула |
1В2П/ОП/+Z |
1В3П/ПТ/-Z |
3В3П/ПРТ/-Y |
Формула |
3В/ПТ/+X |
3В/ОП/-Y |
4П/СК/+X |
Формула |
1В2П/ПРТ/-Y |
1В2П/СК/+Х |
2В1П/ПТ/-Z |
Формула |
ПzВyПyПxВzПyВy/СК/–Y |
ВyВyПzПyПxВz/ПТ/–Z |
ВyВzВхПxВz/ПРТ/–Z |
Вариант |
13 |
14 |
15 |
Формула |
3П/ПРТ/-Z |
1В3П/ПРТ/-Z |
1В1П/ПРТ/-X |
Формула |
1В1П/ПТ/-Z |
2В1П/ПТ/+Z |
3П/ПРТ/+Z |
Формула |
2В/СК/+Y |
1В1П/СК/-Х |
2В2П/КП/-Z |
Формула |
ПyПzПхВxПz/ПРТ/–Z |
ПxВzВyВхВz/ПРТ/+Z |
ПyВyВzПyВyПx/СК/+Z |
Вариант |
16 |
17 |
18 |
Формула |
2П/ПРТ/-Z |
1П/ПРТ/-Z |
3В/ПРТ/+Z |
Формула |
1В2П/ПТ/-Y |
2В1П/ПТ/-Z |
2В2П/ОП/+Y |
Формула |
1В2П/СК/-Х |
1В2П/СК/-Y |
1В2П/ПТ/-Z |
Формула |
ПzВyПxВzПyВyПx/ОП/–Z |
ВxВyВzВyВz/ПРТ/+Y |
ПyПyВzПxВzВy/ПТ/–Z |
Вариант |
19 |
20 |
|
Формула |
2В2П/СК/+Y |
5В/СК/+Y |
|
Формула |
4В1П/КП/+Z |
4В/ОП/+Y |
|
Формула |
2В/ПРТ/-Z |
1В4П/ПРТ/-Z |
|
Формула |
ВzВzПyВyВxПy/ОП/+Z |
A1вyB2пzС3вxD4вzE5пx/ПТ/ |
|
|
|
–Y |
|