

4413
.pdfФедеральное государственное образовательное бюджетное учреждение высшего профессионального образования министерства образования и науки РФ
«Воронежская государственная лесотехническая академия»
Кафедра "Автомобилей и сервиса"
Курс лекций
ЭКСПЛУАТАЦИОННЫЕ СВОЙСТВА АВТОМОБИЛЯ
ТЕОРИЯ И РАСЧЕТ Учебное пособие
Саушкин Олег Викторович ВГЛТА Кафедра «Автомобилей и сервиса»
2011 год
ВВЕДЕНИЕ
Автомобиль – сложная машина и требования, предъявляемые к нему, могут быть выполнены при наличии необходимых эксплуатационных свойств. К ним относятся: тяговые и тормозные качества, проходимость, управляемость, устойчивость, плавность движения и топливная экономичность.
Тяговые качества автомобиля определяются величинами максимальных скоростей движения, преодолеваемых сопротивлений дороги, временем разгона в заданном интервале скоростей.
Тормозные качества автомобиля характеризуются длиной пути и временем, которые необходимы для снижения скорости движения в заданном интервале скоростей или до полной остановки.
Проходимость автомобиля – это способность автомобиля двигаться в тяжелых дорожных условиях без буксования ведущих колес, а также преодолевать дорожные препятствия.
Управляемостью называется способность автомобиля двигаться по направлению, заданному положением управляемых колес.
Под устойчивостью автомобиля понимают его свойство противостоять действию сил, стремящихся вызвать занос и опрокидывание автомобиля.
Плавность хода автомобиля – это способность автомобиля двигаться с необходимой скоростью по разным дорогам с возможно малыми колебаниям, вибрациями и раскачиваниями кузова.
Топливная экономичность определяется затратами, необходимыми для выполнения перевозок в определенных эксплуатационных условиях.
Показатели потребительских свойств автомобиля можно определить опытным путем или расчетными методами. Эффективным является сочетание испытаний автомобиля с теоретическим анализом потребительских свойств и расчетом их показателей. Такой анализ необходим для работников автотранспорта, получающих от автомобильной промышленности готовый подвижной состав, основные параметры которого изменить практически невозможно. Чтобы установить степень соответствия конструкции автомобиля требованиям эксплуатации, необходимо уметь определять значения отдельных показателей. Это легче и быстрее выполнить расчетным методом, при котором используют положения теоретической механики, а также применяют эмпирические формулы и поправочные коэффициенты, учитывающие особенности рабочего процесса агрегатов автомобиля.
. СИЛЫ, ДЕЙСТВУЮЩИЕ НА АВТОМОБИЛЬ
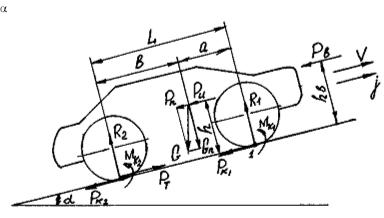
В общем случае движения автомобиля со скоростью v при разгоне с ускорением j, на подъеме, определяемом углом , на автомобиль действуют силы, которые можно разделить на три группы (рис. 1).
Рис. 1. Схема сил, действующих на автомобиль
К первой группе относятся силы, обеспечивающие движение автомобиля, т.е. тяговые силы Pт на ведущих колесах. Во вторую группу входят силы, направленные против движения автомобиля и являющиеся силами сопротивления движению:
PК1 и РК2 – силы сопротивления качению передних и задних колес; Рn – сила сопротивления подъему автомобиля;
Рв – сила сопротивления воздуха;
Рu – сила сопротивления разгону (сила инерции).
В зоне контакта колес автомобиля с дорогой возникают моменты МК1 и МК2 сопротивления качению. Третью группу сил составляют нормальные реакции R1 и R2 дороги на передние и задние колеса,
вызванные составляющей Gn силы веса автомобиля, перпендикулярной плоскости дороги.
1.1. Тяговые силы на ведущих колесах автомобиля
Развиваемый двигателем крутящий момент М через сцепление, трансмиссию и полуоси передается на ведущие колеса автомобиля. В зоне контакта ведущих колес с дорогой возникают тяговые силы, действующие на автомобиль в направлении его движения.
Величина тяговой силы может быть подсчитана по выражению:
(1)
где Мт – крутящий момент на ведущих колесах автомобиля; М – крутящий момент двигателя;
iк – передаточное число коробки передач; iгп – передаточное число главной передачи; rк – радиус качения ведущих колес;
η – к.п.д. трансмиссии.
Крутящий момент двигателя может изменяться в зависимости от угловой скорости n вращения коленчатого вала и величины подачи топлива. Наибольшие значения крутящего момента могут быть получены из внешней скоростной характеристики карбюраторного двигателя или регуляторной характеристики дизельного двигателя при полной подаче топлива. Эти характеристики получают путем испытания двигателей в лабораторных условиях на тормозном стенде.
Расчет крутящего момента двигателя в зависимости от развиваемой мощности N производится по формуле
М=9740 (2)
Для оценки потерь мощности в трансмиссии служит к.п.д. трансмиссии, который представляет собой отношение мощности Nкол на ведущих колесах к мощности N двигателя:
=.
Величина к.п.д. трансмиссии в значительной степени зависит от условий ее эксплуатации. С повышением передаточного числа коробки передач увеличивается сила давления и сила трения между зубьями шестерен, что несколько уменьшает к.п.д. С увеличением скорости вращения шестерен, погруженных в масло, растут гидравлические потери и, соответственно уменьшается к.п.д. трансмиссии.
Наиболее существенное влияние на к.п.д. трансмиссии в эксплуатационных условиях оказывает вязкость масла. С уменьшением температуры масла к.п.д. заметно снижается.
С увеличением передаваемой мощности относительное значение потерь в трансмиссии сокращается, что приводит к повышению к.п.д.
Для практических расчетов к.п.д. трансмиссии принимают постоянным. Средние значения к.п.д. трансмиссии отечественных автомобилей находятся в пределах 0,85…0,90.
1.2. Сила сопротивления качению
Сила сопротивления качению представляет собой сумму сил, затрачиваемых на преодоление внутреннего трения в материале шин при их деформации, на деформацию дороги, на трение поверхности шин о дорогу, на трение в подшипниках ведомых колес.
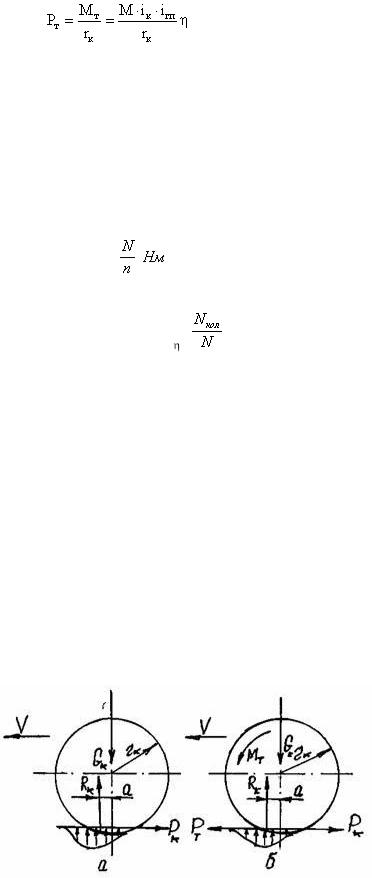
Рассмотрим равномерное, прямолинейное качение колеса автомобиля на горизонтальной твердой поверхности без учета сопротивления воздуха. При качении ведомого колеса, нагруженного вертикальной силой Gк (рис. 2, а), внутреннее трение в шине, так же как и трение между шиной и дорогой, препятствует нарастанию деформаций в передней зоне контакта шины с дорогой и уменьшению ее в задней зоне. Поэтому эпюра распределения давлений на опорной поверхности будет несимметричной, а суммарная нормальная реакция Rк сместится в направлении качения колеса на величину a. В зоне контакта колеса с дорогой возникает сила Рк сопротивления качению.
Рис. 2 . Схема действия сил на колесо автомобиля а – ведомое; б – ведущее
Уравнение равновесия ведомого колеса относительно оси его вращения будет:

Рк rк – Rк а = 0 |
(2) |
или
Рк =  f Gк,
f Gк,
где f =а/rк - коэффициент сопротивления качению колеса.
Если сместить реакцию Rк на ось колеса, то момент сопротивления качению от ее действия Мк можно определить по формуле:
Мк = Рк rк =f Gкrк |
(3) |
При качении ведущего колеса (рис. 2, б) в результате действия тягового момента Мт возникает тяговая сила Pт, толкающая кузов или раму автомобиля в направлении движения V.
Уравнение равновесия ведущего колеса относительно оси его вращения в этом случае будет:
Рт rк + Rк а – Мт – Рк rк =0.
Откуда тяговая сила с учетом сил сопротивления качению определится по формуле:
Рт = |
(4) |
где МТ/rк - касательная сила тяги;
- сила сопротивления качению ведущего колеса.
Сила сопротивления качению колеса, снабженного эластичной шиной, возникает в результате сложных процессов деформации шины и ее взаимодействия с дорожным покрытием. Как было показано выше, сопротивление качению определяется радиальной и тангенциальной деформацией шины, которая зависит от нагрузки колеса, давления воздуха в шине и свойств ее материала. Кроме того, на силу сопротивления качению оказывает влияние проскальзывание элементов шины в зоне ее контакта с дорожным покрытием, особенности входа участков шины в контакт с поверхностью качения, гистерезис в шине, прилипание элементов шины к поверхности дороги и ряд других факторов.
Коэффициент сопротивления качению практически не изменяется при увеличении скорости движения автомобиля до 60-70 км/час. При больших значениях скорости значение коэффициента f заметно увеличивается. Это вызвано колебаниями протектора шины, а также ее ударами о неровности дороги. Оба явления приводят к дополнительным потерям энергии, что существенно увеличивает сопротивление качению колеса.
Для практических расчетов зависимости коэффициента сопротивления fv от скорости можно установить, используя эмпирическую формулу:
fv =f(1+Av2), |
(5) |
где А – постоянная величина, приблизительно равная (4…5)10-5, v – скорость движения автомобиля в км/час.
Из выше изложенного следует, что коэффициент сопротивления качению зависит от большого количества отдельных и связанных один с другим факторов и не может быть определен аналитически. Коэффициент f определяют экспериментальными методами: буксированием автомобиля, при движении автомобиля накатом, изменением силы сопротивления качению отдельного колеса на тензометрическом стенде.
Значения коэффициента f для отдельных видов дорожного покрытия приведены в таблице 1.
Таблица 1 |
|
Коэффициенты сопротивления качению |
|
Дорожное покрытие |
f |
|
|
Цементное и асфальтобетонное в хорошем состоянии |
0,014…0,018 |
Ровное и уплотненное щебенчатое или гравийное покрытие |
0,02…0,025 |
Брусчатка |
0,02…0,025 |
Булыжник |
0,035…0,045 |
Грунт ровный, сухой, плотный |
0,03…0,06 |
Снежная дорога |
0,025…0,03 |
Песок сухой |
0,15…0,3 |
Песок влажный |
0,08…0,1 |
1.3. Сила сопротивления подъему
При движении автомобиля на подъем возникает сила Рn сопротивления подъему или скатывающая сила. Эта сила равна составляющей силы веса автомобиля, направленной параллельно плоскости дороги (см. рис.
1), т.е.
Рn =G .sinα.
При малых значениях синус угла можно заменить углом в радианах, который в учебной литературе обозначается буквой i. Иногда величину подъема указывают в процентах. Таким образом, сила сопротивления подъему может быть выражена:
Рn =G.sinα=G.i= |
(6) |
При движении на подъем, сила сопротивления качению становится меньше, чем при движении по |
|
горизонтальной дороге. Это объясняется тем, что при движении на подъем перпендикулярно дороге |
|
действует часть силы веса автомобиля G.cosα Общая сила сопротивления дороги Рg будет равна: |
|
Рg = Рк + Рn =f.G.cos + G.sin |
=G(f.cos + sin ). |
Для углов подъема до 10% cos ближе к единице и в расчетах обычно не учитывается. |
|
Тогда |
|
Рg =G(f+i). |
(7) |
1.4. Сила сопротивления воздуха
При движении автомобиля сила сопротивления воздуха складывается из силы давления встречных частиц воздуха, сил разряжения за автомобилем и на создание завихрений, а также сил трения воздуха о поверхность автомобиля. Сила сопротивления воздуха зависит от его плотности, лобовой поверхности автомобиля, скорости движения автомобиля, а также от обтекаемости автомобиля. Силу сопротивления
воздуха можно определить по формуле:
Рв =с. .F.v2Н,
где с – коэффициент обтекаемости автомобиля;
 – плотность воздуха в Н.с2/м4;
– плотность воздуха в Н.с2/м4;
v – скорость движения автомобиля в м/с;
F – лобовая площадь автомобиля в м2, представляющая собой площадь проекции автомобиля на плоскость, перпендикулярную его продольной оси.
Произведение величин с и γ заменяют одним коэффициентом К, который называется коэффициентом сопротивления воздуха. Выражая скорость движения в км/ч, получим:
Рв = Н (8)
Н (8)
Сила Рв при заданной скорости автомобиля зависит в основном от обтекаемости автомобиля. Для легковых автомобилей проблема улучшения обтекаемости решается путем создания более совершенной формы кузова и устранением по возможности его выступающих частей. Уменьшение силы сопротивления воздуха для грузовых автомобилей может быть достигнуто затягиванием грузовой платформы брезентом, который натягивается наклонно от крыши кабины к заднему борту. Хорошие результаты по снижению аэродинамических сопротивлений грузового автомобиля дает расширение кабины до ширины кузова и установки на крыше кабины специальных обтекателей.
Величина коэффициента сопротивления воздуха для отечественных легковых автомобилей составляет
0,15…0,3 Н.с2/м4; для грузовых – 0,5…0,7 Н.с2/м4.
1.5. Сила сопротивления разгону
При движении автомобиля с ускорением необходимо преодолевать силу сопротивления разгону (силу инерции), равную:
Рu = Рu'+ Рu'',
где Рu' - сила, необходимая для ускорения массы автомобиля в его поступательном движении; Рu'' - сила, необходимая для углового ускорения вращающихся масс автомобиля.
Сила Рu' равна:
Рu'= ,
,
где G – сила веса автомобиля; m – масса автомобиля;
g– ускорение силы тяжести. Сила Рu'' равна:
Рu''= ,
,
где Im – момент инерции маховика;
 – угловое ускорение маховика; Ik – момент инерции колеса;
– угловое ускорение маховика; Ik – момент инерции колеса;
 – угловое ускорение колеса;
– угловое ускорение колеса;
z – количество колес у автомобиля.
Выражая угловые ускорения маховика и колес через ускорение поступательного движения автомобиля, получим
Рu''= |
. |
Общая сила сопротивления разгону |
|
Рu = |
. |
Выражение, заключенное в скобках, учитывает силу, необходимую для ускорения вращающихся масс и |
|
называется коэффициентом δ учета влияния вращающихся масс. При подстановке коэффициента δ выражение для силы инерции примет вид
Рu = |
(9) |
Для определения значения коэффициента δ можно воспользоваться приближенным выражением, |
|
учитывающим передаточное число включений коробки передач: |
|
δ=1,03+α' |
(10) |
Для легковых автомобилей α'=0,05…0,07; для грузовых автомобилей и автобусов α'=0,04…0,05. |
|
1.6. Нормальные реакции дороги на автомобиль |
|
Для определения нормальных реакций R1 и R2 |
дороги на автомобиль (рис. 1) составим уравнение |
моментов относительно точки 1 опоры передних колес: |
|
- R2.L+Gn.a+Pn.h+Pu.h+Pв.hв+МК1+МК2=0, |
|
где R2 – нормальная реакция дороги на задние колеса автомобиля; |
|
L – продольная база автомобиля; |
|
а и b – расстояния от центра тяжести до передней и задней осей автомобиля; |
|
Gn – составляющая силы веса G автомобиля, перпендикулярная плоскости дороги; |
|
Pn – сила сопротивления подъему; |
|
h – высота расположения центра тяжести; |
|
Pu – сила инерции;
Pв – сила сопротивления воздуха;
hв – высота расположения над дорогой точки приложения равнодействующей сил сопротивления воздуха; |
||||
МК1 и МК2 – моменты сопротивления качению передних и задних колес. |
|
|
||
Так как Мк1+Мк2=( R1+R2)f.rк=Gn. f .rк= G . f .rк.cos , то после подстановки значений отдельных сил для |
||||
реакции R2 получим: |
|
|
|
|
|
R2= |
|
(11) |
|
Реакцию дороги на передние колеса можно определить по выражению: |
|
|
||
|
R1= Gn–R2=G.cosα-R2. |
(12) |
|
|
Для определения величины реакций, приходящихся на |
колеса при |
движении в |
различных |
|
эксплуатационных условиях, применяются коэффициенты перераспределения веса автомобиля: |
|
|||
|
и |
(13) |
|
|
где |
и - коэффициенты соответственно для передней и задней оси; |
|
|
|
G1 |
и G2 - силы веса автомобиля, приходящиеся на передние и задние колеса автомобиля, установленного |
|||
на горизонтальной плоскости. |
|
|
|
|
Коэффициенты перераспределения силы веса автомобиля |
показывают, |
как отличается |
нагрузка, |
|
приходящаяся на передние или задние колеса автомобиля при различных условиях движения, от нагрузки при неподвижном, находящемся на горизонтальной плоскости автомобиле. Расчет горизонтальных реакций дороги на автомобиль необходим при определении сил сцепления колес с дорогой.
Очевидно, что для автомобиля, стоящего на горизонтальной плоскости, G1=R1 |
и G2=R2, и, |
|||
следовательно, коэффициенты |
и |
равны единице. |
|
|
Обычно при движении автомобиля R1≠ G1 и R2≠ G2, поэтому коэффициенты |
и |
отличаются от |
||
единицы и обычно лежат в пределах: |
=0,5…1,5 и =1,5…0,5. |
|
|
|
ПРИМЕРЫ РАСЧЕТОВ
Пример 1.
Зависимость мощности Nк0, необходимой для преодоления сопротивления качению грузового автомобиля, собственный вес которого G0=45000 Н, и зависимость силы сопротивления качению Рк того же,

но только полностью груженого автомобиля от скорости движения v приведена на графике (рис. 3). Пользуясь графиком, найти полезную нагрузку автомобиля.
Мощность, необходимая на качение ненагруженного автомобиля
Nko = Pko·V,
отсюда сила сопротивления качению (см. график на рис. 3)
|
Pko = |
= |
= 1440 H |
|
Определим |
коэффициент |
|
|
сопротивления |
качению колес |
|
|
автомобиля: |
|
|
|
f = |
= |
= 0,032. |
|
Сила сопротивления качению |
||
|
полностью груженого автомобиля |
||
|
|
Pk = f·G , |
|
|
тогда общий вес груженого |
||
|
автомобиля |
|
|
Рис. 3. График к примеру 1 п.1 |
G = |
= |
= 71875 H , |
|
|
|
|
где Pk – сила сопротивления качению груженого автомобиля (см. график на рис. 3). Полезная нагрузка автомобиля:
Gгр = G – Go = 71875 – 45000 = 26875 H (2,6875 т).
Пример 2.
Седельный тягач (рис. 4) движется с полуприцепом на горизонтальном участке асфальтированной дороги с равномерной скоростью V = 60 км/ч; коэффициент сопротивления качению у тягача и полуприцепа f = 0,02.
Рис. 4. Схема к определению реакций дороги R1 и R2 на колеса седельного тягача
Требуется определить реакции R1 и R2 дороги на передние и задние колеса тягача.
Исходные данные для расчета: сила веса тягача G=50000 H, его продольная база L=3,5 м, продольная координата центра тяжести b=1,4м, продольная координата точки сцепки ℓпр=0,35 м, высота точки сцепки над поверхностью дороги hпр=1,0 м, площадь лобового сопротивления тягача F=3,5 м2, коэффициент сопротивления воздуха тягача без учета дополнительного воздействия полуприцепа К=0,6нс2/м4, высота центра парусности hb=1,5 м, радиус колес тягача и полуприцепа rk=0,35м. Сила веса полуприцепа Gпр=30000 H, его продольная база Lпр=2,0м, продольная координата центра тяжести bпр=1,0 м.
Для решения задачи рассмотрим отдельно условия равновесия полуприцепа и тягача с учетом их силового взаимодействия. Сначала рассмотрим силовое воздействие полуприцепа на тягач. Оно выражается в передаче на тягач части силы веса полуприцепа Gпр' в точке сцепки и тягового сопротивления Рпр.
Из уравнения моментов сил относительно точки О1 касания колес полуприцепа с дорогой имеем:
Gпр'·Lпр + Мк пр – Gпр·bпр – Рпр·hпр = 0
Учитывая, что Мк пр = f (Gпр – Gпр')· rk , а Рпр = f(Gпр – Gпр'),
получаем после преобразований, что
Gпр' = Gпр  ≈ Gпр
≈ Gпр = 30000∙
= 30000∙ = 15000 H,
= 15000 H,
Соответственно Рпр = f (Gпр – Gпр') = 0,02·(30000 – 15000) = 300 H
Для определения реакции R1 на передние колеса тягача составляем уравнение моментов сил относительно точки О2 касания задних колес тягача с дорогой, отбросив полуприцеп и заменяя его действие на тягач противоположно направленными силами Gпр' и Рпр:
R1 = 
Сопротивление воздуха Pв подсчитываем по формуле (8), принимая что наличие полуприцепа увеличивает коэффициент обтекаемости к на 20%. Тогда
Pb =  =
=  = 697,8 H
= 697,8 H
Момент сопротивления качению тягача:
Mk1 + Мк2 = f (G + Gпр')·rk = 0,02·(50000 + 30000)·0,35 = 560 H.
Сделав соответствующие подстановки в формулу для определения реакции R1, получаем:
R1 =  = 20955 H
= 20955 H
Реакция задних колес тягача:
R2 = G + Gпр' – R1 = 50000 + 15000 – 20955 = 44045 H
При отсутствии полуприцепа реакция на задние (ведущие) колеса тягача:
R2' =  =
=  = 30000 H
= 30000 H
Из полученных данных следует, что применение полуприцепа заметно увеличивает нагрузку (цепной вес) задних колес седельного тягача.
2. УПРАВЛЯЕМОСТЬ АВТОМОБИЛЯ
Под управляемостью автомобиля понимается его способность точно сохранять заданное направление движения (заданный курс), а при соответствующем воздействии изменять его по требуемой траектории. Первое свойство называется курсовой устойчивостью, а второе – поворотливостью (поворачиваемостью) автомобиля.
Качественно управляемость автомобиля можно оценить по степени приближения фактических параметров движения к желательным.
Могут быть рассмотрены следующие количественные показатели:
1.Предельные значения кривизны траектории направляющей точки при круговом движении автомобиля (минимальные радиусы кривизны). Управляемость автомобиля тем лучше, чем больше кривизна траекторий, по которым могут двигаться однотипные точки сравниваемых автомобилей.
2.Предельные значения скорости изменения кривизны траекторий различных точек автомобиля. Управляемость автомобиля тем лучше, чем больше предельная скорость изменения кривизны
траектории однотипных характерных точек сравниваемых автомобилей.
3.Количество энергии, затрачиваемой на управление автомобилем при заданной траектории направляющей точки. Чем меньше энергии затрачивается на управление, тем лучше управляемость автомобиля.
4.Числовые значения отклонения траектории направляющей точки и направления фактического движения от заданных и частота повторяемости отклонений.
Чем лучше управляемость, тем с большей скоростью водитель может вести автомобиль, тем больше может быть средняя скорость движения.
Кроме того, хорошая управляемость автомобиля повышает безопасность движения, что особенно важно
всвязи с ростом скоростей движения и количества автомобилей на дорогах.
Причинами нарушения управляемости могут явиться как внешние факторы, зависящие от условий движения, так и внутренние, зависящие от конструкции и технического состояния автомобиля.
Внешними факторами, вызывающими нарушение курсовой устойчивости, являются неровности и поперечный уклон дороги, боковой ветер, неодинаковость сопротивления качению правых и левых колес.
К внутренним факторам, приводящим к нарушению курсовой устойчивости, относятся различные конструктивные параметры автомобиля, а также его техническое состояние. Так, например, при движении автомобиля по неровной дороге плоскость вращения колес может изменяться в зависимости от кинематической схемы подвески, а возникающий при этом гироскопический момент будет стремиться повернуть управляемые колеса.
Под действием боковых сил, например, при движении по косогору или центробежной силы на повороте, автомобиль из-за боковой эластичности шин может начать двигаться под углом к направлению, заданному управляемыми колесами (увод колес).
Рассмотрим две основные причины ухудшения управляемости: колебания колес и осей автомобиля и увод колес.
2.1. Колебания колес и осей автомобиля
Изменения конструкции автомобиля в процессе его совершенствования (повышение эластичности шин и изменения схем подвесок), а также повышение скоростей движения создали условия, вызывающие колебания передних колес. Отмечено, что при движении автомобилей могут в ряде случаев возникать угловые колебания управляемых колес вокруг поворотных стоек (шкворней).
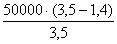
Угловые колебания управляемых колес вызываются разными причинами. Если колеса недостаточно сбалансированы, то при их вращении возникают центробежные силы Рц (рис. 5, а). Составляющие Рх этих сил образуют моменты, стремящиеся повернуть колеса вокруг поворотных стоек. Особенно неблагоприятны случаи, когда неуравновешенными оказываются оба колеса, причем их центробежные силы направлены в противоположные стороны, как показано на рисунке 5, б. Возникающие в результате этого суммарные поворачивающие моменты переменны по направлению и вызывают «виляние» колес. Наряду с этим составляющие Рц центробежных сил вызывают «раскачивание» колес в вертикальной плоскости. Чем выше скорость движения, тем заметней влияние неуравновешенности колес.
Рис. 5. Схема сил, возникающих при неуравновешенности управляемых колес
Величина центробежной силы инерции Pц = mω2r, где m – неуравновешенная масса на диске колеса;
ω – круговая частота вращения колеса;
r – радиус вращения неуравновешенной массы.
Величину массы m определяют при статической балансировке колеса путем измерения момента Мдб дисбаланса, создаваемого силой веса mg (рис. 5, в).
Величина массы
m = |
(14) |
где m – неуравновешенная масса, кг;
Мдб – момент дисбаланса, нм;
g – ускорение свободного падения, g= 9,8 м/с2
r – радиус вращения неуравновешенной массы, м.
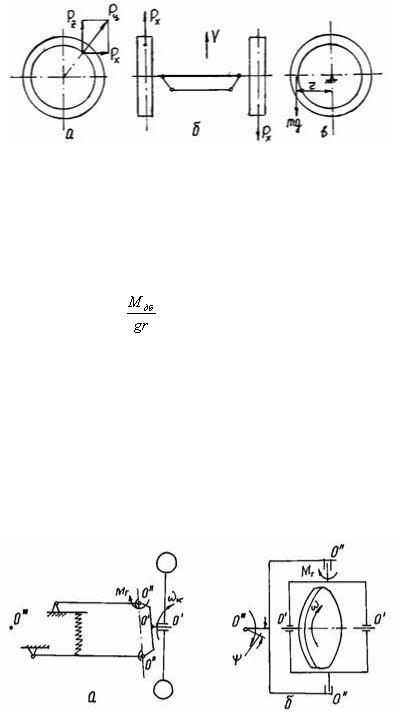
Одной из причин появления сил, вызывающих колебание передних колес вокруг поворотных стоек (шкворней) является гироскопический момент, возникающий при деформации подвески, изменяющей плоскость расположения колеса. Наиболее распространенной для легковых автомобилей отечественных марок является независимая подвеска на поперечных рычагах (рис. 6,а). При деформации подвески в результате наезда колеса на дорожную неровность только равная длина рычагов обеспечит сохранение установленного угла развала колеса. Однако при этом колесо будет смещаться в поперечном направлении, что приведет к изменению колеи автомобиля, ухудшению устойчивости и большему износу шин. Поэтому обычно рычаги подвески делают неодинаковой длины, что уменьшает смещение колес в поперечном направлении, но вызывает изменение угла развала колес и приводит к возникновению гироскопического момента.
Рис. 6. Независимая рычажная подвеска колеса (а) и схема гироскопа (б).
Суть гироскопического эффекта можно пояснить на схеме простейшего гироскопа (рис. 6,б). На горизонтальной оси О'О', установленной в подшипниках рамки, закреплен ротор. Рамка может поворачиваться вокруг вертикальной оси О''О'' аналогично управляемому колесу вокруг поворотной стойки; она может также качаться вокруг оси, перпендикулярной чертежу и проходящей через точку О'''.
Если при вращающемся роторе повернуть гироскоп вокруг точки О''' в плоскости чертежа, то рамка с ротором начнет поворачиваться вокруг вертикальной оси О''О''. Это свойство и носит название гироскопического эффекта.
Гироскопический момент при повороте рамки вокруг оси О''О'' определяют по формуле: Мг = Iω |
, |
где I – момент инерции ротора; |
|
ω – угловая частота вращения ротора; |
|
φ – угол поворота гироскопа вокруг точки О'''. |
|
Аналогичное явление произойдет при деформации рычажной подвески управляемого колеса (рис. 6,а). Вращающееся вокруг оси О'О' колесо с угловой частотой ωк, при деформации подвески и ее повороте вокруг некоторой точки О''', будет стремиться одновременно повернуться вокруг оси О''О'' поворотной стойки с поворачивающим моментом Мг.
Направление гироскопического момента Мг периодически изменяется в зависимости от направления поворота рычагов подвески вокруг точки О'''.
При зависимой подвеске передних колес балка моста заключена между двумя эластичными элементами
– шинами и рессорами, что может привести к вертикальным колебаниям оси балки. Наиболее опасным для движения автомобиля являются угловые вертикальные колебания оси. Для определения частоты таких колебаний рассмотрим положение оси в процессе колебаний, определяемое углом ψ (рис. 7).
|
В |
этом |
положении моменты |
||
|
от рессор и шин стремятся вернуть |
||||
|
ось |
в |
|
первоначальное |
|
|
горизонтальное |
положение. |
|||
|
Момент от рессор можно принять |
||||
|
равным |
|
|
|
|
|
Мр = |
|
ψСрВ1 = В12Срψ , |
||
Рис. 7. Схема угловых колебаний |
где Ср – жесткость рессоры. |
||||
Аналогично |
восстанавливающий |
||||
передней оси в вертикальной |
|||||
момент от шин будет равен Мш=1/2 |
|||||
плоскости |
|||||
В2Сшψ, |
|
|
|
||
где Сш – жесткость шины.
Из механики известно, что частота угловых колебаний равна
ω= |
, |
где Сф – угловая жесткость системы, равная |
; |
I – момент инерции моста. |
|
Подставляя выражение моментов, получим: |
|
ω = |
(15) |
Таким образом, угловая частота собственных колебаний переднего моста уменьшается при снижении жесткости рессор и шин, а также при увеличении момента инерции моста. Силами, которые могут вызвать колебания моста, являются, во-первых, неровности дороги, а во-вторых, неуравновешенность передних колес автомобиля.
Зная причины, вызывающие колебания колес и оси, можно наметить пути уменьшения этих колебаний. Влияние неуравновешенности колес устраняется путем уменьшения допусков на дисбаланс колес в
сборе. Кроме того, для уменьшения влияния неуравновешенности колес на их колебания вокруг шкворней целесообразно уменьшить расстояние от шкворня до плоскости колеса, т.е. размещать шкворень внутри обода колеса. В результате при той же неуравновешенности колес можно уменьшить плечо действия центробежных сил и этим уменьшить колебания колес. Существенное уменьшение колебания колес вокруг поворотных стоек возможно устранением гироскопического момента путем применения подвески, деформация которой не вызывает изменение плоскости колеса. Хорошие результаты даст применение рычажной подвески, у которой нижние рычаги немного длиннее верхних так, чтобы изменение колеи было не более 4 мм. Такое изменение колеса не отражается на управляемости автомобиля и на износе шин. Телескопическая подвеска обеспечивает перемещение колеса строго в одной плоскости при деформации упругого элемента.