

3607
.pdfМинистерство образования и науки Российской Федерации Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования
«Воронежская государственная лесотехническая академия»
ДИНАМИКА АВТОМОБИЛЯ
Методические указания к выполнению курсовой работы для студентов по направлению подготовки
190700 – Технология транспортных процессов; специальности 190702 – Организация и безопасность движения
Воронеж 2013
2
УДК 629.33.016.5
Карпов, А. С. Динамика автомобиля [Текст] : методические указания к выполнению курсовой работы для студентов по направлению подготовки 190700 – Технология транспортных процессов; специальности 190702 – Организация и безопасность движения / А. С. Карпов, Н. И. Бойко, А. Ю. Артемов ; М-во образования и науки РФ, ФГБОУ ВПО «ВГЛТА». – Воронеж, 2013. – 32 с.
Печатается по решению учебно-методического совета ФГБОУ ВПО «ВГЛТА» (протокол № 8 от 22 июня 2012 г.)
Рецензент д-р техн. наук, проф. кафедры электротехники и автоматики Воронежского ГАУ Д.Н. Афоничев
3
Оглавление
Введение………………………………………………………….……. 5
Управляемость одиночного автомобиля…………………………….. 6
Схема увода автомобиля без бокового увода рис. 1………………... 6
Схема поворота автомобиля с нейтральной поворачиваемостью рис. 2………………………………………….… 10
Схема поворота автомобиля с недостаточной поворачиваемостью рис. 3……………………………………………. 11
Схема поворота автомобиля с избыточной поворачиваемостью рис. 4………………………………………….… 12
Схема сил, действующих на автомобиль при повороте рис. 5…….. 17
Принятые обозначения……………………………………………….. 20
Варианты заданий…………………………………………………….. 28
Контрольные вопросы………………………………………………... 30
Библиографический список………………………………………….. 31
4
ЦЕЛЬ И ЗАДАЧИ КУРСОВОЙ РАБОТЫ
Целью курсовой работы является закрепление студентами знаний, по-
лученных в лекционном курсе «Динамика автомобиля» и вытекающими из него пониманиями, связанными с движением транспортных средств в раз-
личных условиях эксплуатации, в различных дорожных условиях.
В ходе выполнения курсовой работы должны быть определены крити-
ческие скорости автомобиля:
-по боковому опрокидыванию;
-на повороте;
-по боковому скольжению/ заносу/;
-по боковому опрокидыванию;
-по управляемости;
-по боковому уводу колес.
Пояснительная записка выполняется на листах формата А4. Результаты вычислений должны быть представлены в виде таблиц и графиков.
По полученным результатам расчетов должны быть построены четыре схемы /общая схема поворота без бокового увода, схема поворота автомоби-
ля с нейтральной поворачиваемостью, схема поворота автомобиля с недоста-
точной поворачиваемостью, схема поворота автомобиля с избыточной пово-
рачиваемостью/ на листах формата А4.
Кроме того, курсовая работа позволит студентам более детально озна-
комиться с конструкциями рулевых управлений современных транспортных средств.
5
ВВЕДЕНИЕ
Рост автомобилизации в Российской Федерации, как и во всем мире,
требует более совершенных конструкций автомобилей. В связи с этим воз-
растают требования к тормозным механизмам современных автомобилей,
конструкциям рулевых управлений.
Эти и ряд других элементов конструкции современных транспортных средств прямым образом влияют на безопасность движения, повышают ма-
невренность в опасных дорожных ситуациях, обеспечивают своевременную остановку, сохраняя тем самым жизнь и здоровье участникам дорожного движения.
Подготовка специалистов по организации дорожного движения требует от них знаний конструкции основных узлов и агрегатов автомобилей,
влияющих непосредственно на безопасность движения, которые впоследст-
вии будут применены на практике при планировке городских магистралей,
использовании современных технических средств, регулировании дорожного движения.
Курсовая работа позволит студентам познакомиться с конструкциями современных транспортных средств и основами их расчетов.

6
УПРАВЛЯЕМОСТЬ АВТОМОБИЛЯ Управляемость одиночного автомобиля
Изменение положения оси автомобиля на плоскости дороги с помощью из-
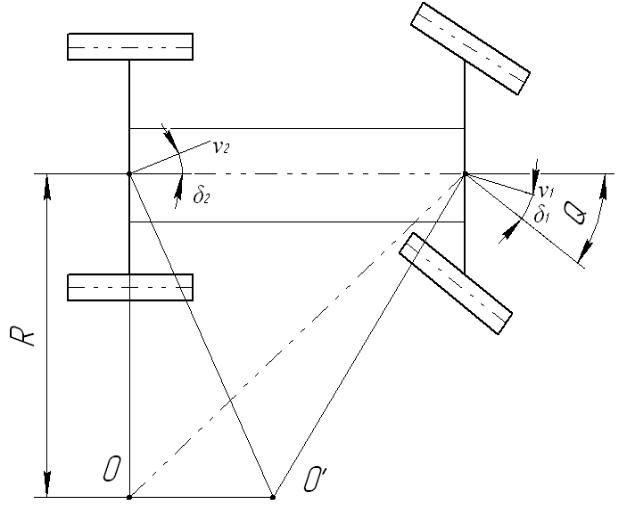
менения положения управляемых колес называется поворотом автомобиля (рис. 1).
Рис. 1. Схема поворота автомобиля без бокового увода
Свойство автомобиля сохранять заданное направление движения или изменять его в соответствие с воздействием на органы управления называет-
ся управляемостью.
Свойство автомобиля изменять направление движения по заданной траектории, при воздействии на органы управления, называется поворачи-
ваемостью.

7
Траекторное отклонение – это отклонение продольной оси автомобиля от направления траектории движения.
Курсовое отклонение – это отклонение продольной оси автомобиля от направления траектории движения.
Способность автомобиля совершать повороты характеризуется пово-
ротливостью.
Хорошая поворотливость возможна при выполнении следующих условий:
1.Управляемые колеса катятся без бокового скольжения.
2.Рулевой привод обеспечивает правильное соотношение углов пово-
рота управляемых колес.
3.Компоновка автомобиля, подвеска и шины обеспечивают оптималь-
ное соотношение между углами увода передних и задних колес.
4.Конструкция рулевого управления позволяет судить о силах, дейст-
вующих со стороны дороги на управляемые колеса.
Условие возможности поворота автомобиля
f cos .
Величины теоретически необходимых углов поворота управляемых
колес при отсутствии их увода:
– наружного
tg H |
L |
; |
||
|
||||
R l0 |
||||
|
|
|
||
– внутреннего |
|
|
||
tg B |
|
L |
. |
|
|
|
|||
|
R l0 |
|||
|
|
|
||
Угол увода, обусловленный действием на колесо боковой силы, рад.:
Py .
K y
Соотношение между углами поворота управляемых колес автомобиля:
ctg H ctg B LL0 ;
8
ctg H |
ctg B |
|
2 R |
; |
|
L |
|||||
|
|
|
|
ctg 0,5 (ctg H ctg B )
или
0,5 ( H B ) .
Угол поворота рулевого колеса автомобиля, град.:
ук iрм iрп .
Средний радиус поворота автомобиля на горизонтальной дороге, м:
– при отсутствии увода осей (с жесткими шинами)
;
–при уводе передней и задней осей (с эластичными шинами)
R |
|
|
|
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
tg( 1) tg 2 |
|
|
|
|||||||||
или |
|
|
|
|
|
|
|
|
|
|
||
|
L2 |
Ga |
v2 |
(a k |
|
|
b k |
|
) |
|||
|
y 2 |
y1 |
||||||||||
|
|
|
g |
|
a |
|
|
|
|
|||
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
||
Минимальный радиус поворота автомобиля, м.: |
|
|||||||||||
|
Rmin |
|
|
L |
. |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||||
|
sin max |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|||
Минимальный радиус поворота автомобиля из условий бокового скольжения при равномерном движении с постоянным углом поворота, м:
R |
v2 |
|
a |
. |
|
|
||
min |
g |
|
|
||
Минимальный радиус поворота автомобиля из условий опрокидывания при равномерном движении с постоянным углом поворота, м.:
R |
2 v2 |
h |
|
a |
0 |
. |
|
|
|
||
min |
g B |
||
|
|||
Внешний габаритный радиус поворота автомобиля, м.:
Rгаб max Rmin 1 .
Внутренний габаритный радиус поворота автомобиля, м.:

9
Rгаб min Rmin 2 .
Поворотная ширина по следу колес, м.:
Bп Rmin Rгаб min .
Габаритная полоса движения, м.:
BГ Rгаб max Rгаб min .
Угол увода колеса, обусловленный действием на него боковой силы, рад.:
Py .
K y
Коэффициент сопротивления уводу колеса с учетом условий его рабо-
ты, рад./Н:
k y k y0 qz qт q .
Зависимость коэффициента сопротивления уводу колеса от размеров и давления воздуха в шине, рад./Н:
k y0 0,76 bш (d 2 bш ) (0,1 2 Pш ) 106 .
Коэффициент коррекции, учитывающий отклонение нормальной на-
грузки от оптимальной:
q |
z |
2,4 a |
z |
1,8 a2 |
0,4 a3 |
, |
||
|
|
|
|
z |
z |
|
||
где |
|
az |
|
|
Rz |
|
|
|
|
Rz опт |
|
|
|||||
|
|
|
|
|
|
|||
Коэффициент коррекции, учитывающий влияние продольной силы,
действующей на колесо:
|
Rx |
|
2 |
|
|||
|
1 |
|
|
|
|
||
|
|
|
|
||||
qт |
Rz |
. |
|||||
1 0,375 |
Rx |
|
|||||
|
|
||||||
|
Rz |
|
|||||
Коэффициент учитывающий нелинейную зависимость боковой силы от угла увода колеса:
|
k y0 0 |
|
||||
|
arctg |
|
|
|
|
|
|
2 |
Rz |
|
|||
q |
|
|
|
. |
||
|
|
|
||||
|
|
0 |
|
|
||
|
k y 0 |
|
|
|
||
|
|
|
|
|||
2 Rz
|
|
|
|
10 |
|
|
|
|
|
|
||||||
Угол бокового увода передних колес, рад.: |
|
|
||||||||||||||
|
|
|
|
|
Ga |
|
|
va2 |
|
|
|
a |
. |
|||
|
|
1 |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
g |
R cos |
|
k y1 L |
||||||||
|
|
|
|
|
|
|
||||||||||
Угол бокового увода задних колес, рад.: |
|
|
||||||||||||||
|
|
|
Ga |
|
va2 |
|
|
a |
|
|
|
, |
|
|||
2 |
|
|
k y 2 nk |
L |
|
|||||||||||
|
|
|
g R |
|
|
|
||||||||||
|
|
|
|
|
|
|
||||||||||
где nk – число колес на одной оси.
Поворачиваемость автомобиля:
– нейтральная (рис. 2)
1 |
2 или |
a |
|
va |
; |
|
|
L |
|||||
|
|
|
|
Рис. 2. Схема поворота автомобиля с нейтральной поворачиваемостью