

3066
.pdfМинистерство науки и высшего образования РФ Федеральное государственное бюджетное образовательное учреждение высшего образования
«Воронежский государственный лесотехнический университет имени Г.Ф. Морозова»
Теория автоматического управления
Методические указания к выполнению курсового проекта для студентов по направлению подготовки
15.03.04 Автоматизация технологических процессов и производств
Воронеж 2018
УДК 681.5
Грибанов, А. А. Теория автоматического управления [Электронный ресурс] : метод. указания к выполнению курсового проекта для студентов по направлению подготовки 15.03.04 – Автоматизация технологических процессов и производств / А. А. Грибанов; ВГЛТУ. – Воронеж, 2018. – 22 с.
Печатается по решению редакционно-издательского совета ВГЛТУ
Рецензент: д.т.н., профессор, зав. кафедрой электротехники и автоматики ФГБОУ ВО «Воронежский государственный аграрный университет имени императора Петра I» Афоничев Д.Н.
2
Введение
Целью курсового проекта является закрепление теоретических знаний в области анализа объектов управления, выбора средств управления, анализа и синтеза системы комбинированного автоматического управления. Каждый студент, в соответствии с вариантом задания, получает технологический объект автоматического управления с входным параметром по каналу управления, регулируемым параметром и возмущающим воздействием, а также передаточные функции объекта по каналу управления и каналу основного возмущающего воздействия. При выполнении курсового проекта студент проводит анализ и синтез одноконтурных, многоконтурных систем автоматического регулирования, используя пакет прикладных программ MathCAD, а также знания и навыки исследования звеньев и устойчивости автоматических систем регулирования, полученные на лабораторных и практических занятиях по курсу «Теория автоматического управления» (ТАУ).
При выполнении курсового проекта каждый его раздел иллюстрируется схемами, графиками в формате А4 и по каждому разделу студент дает необходимое заключение о показателях качества средств и систем регулирования.
Графики статических, динамических и частотных характеристик необходимо строить в математическом пакете прикладных программ MathCAD.
В конце курсового проекта нужно представить развернутое заключение на 1-2 страницы, которое должно содержать техническую характеристику предложенной системы комбинированного управления, ее технический уровень, показатели качества, надежности, практической значимости.
Курсовой проект заканчивается списком используемой литературы.
3
1 Порядок выполнения курсового проекта
1.1 Введение
Студенту с помощью литературного источника необходимо отметить актуальность предложенной ему комбинированной системы автоматического управления для повышения эффективности соответствующих технологий лесного комплекса. Необходимо отметить также цель курсового проекта и перечислить основные научно-теоретические и прикладные результаты курсового проектирования.
1.2 Описание работы технологического объекта автоматического управления
Студент для своего объекта управления в учебной и научно-технической литературе находит описание технологического процесса, работы оборудования и дает соответствующую технологическую схему. При этом представляет достаточно подробное описание и отмечает важность, актуальность разработки рассматриваемой системы управления. Желательно сделать критический анализ существующих систем автоматического регулирования по отклонению, в том числе в вопросах быстродействия, точности этих систем и их возможностей эффективной компенсации возмущающих воздействий.
1.3 Составление структурной схемы одноконтурной системы автоматического регулирования по отклонению
|
|
|
|
|
|
|
|
f(t) |
|
|
|
||
g(t) |
|
|
x(t) |
|
xp1(t) |
|
xp(t) |
|
y1(t) |
|
y(t) |
||
W(P)рег |
W(P)им |
W(P)об |
W(P)дат |
||||||||||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
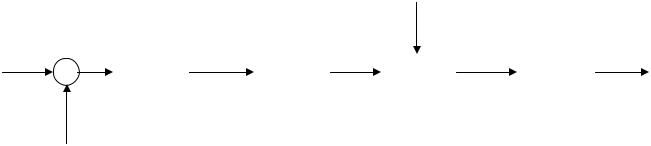
Рис. 1. Структурная схема одноконтурной АСР
где g(t) – задающее воздействие задатчика регулятора; x(t) – ошибка регулирования;
xр1(t) – регулирующее воздействие регулятора на исполнительный меха-
низм;
xр(t) – регулирующее воздействие исполнительного механизма на объект регулирования, изменяющее подачу вещества или энергии на объект регулирования;
y1(t) – регулируемая величина на выходе объекта регулирования;
y(t) – измеряемая датчиком выходная величина объекта, которая сравнивается с задающим воздействием g(t);
x(t)=g(t)-y(t) – ошибка регулирования;
f(t) – возмущающее воздействие на объект регулирования.
4
Определяются передаточные функции W(P)рег, W(P)им, W(P)дат. Передаточная функция объекта регулирования W(P)об показана в задании Вашего варианта.
1.4 Выбор технических средств системы автоматического регулирования
Выбор датчиков, регуляторов, исполнительных механизмов должен осуществляться исходя из требований надежности, быстродействия и экономичности. При этом необходимо учитывать диапазон возможного изменения регулируемого параметра, согласованность технических характеристик и физических сигналов на входе и выходе датчика, регулятора, исполнительного механизма и объекта. Из каталогов средств автоматизации, справочной литературы, электронных ресурсов сети Интернет выбрать отечественные современные средства автоматизации, определить коэффициенты усиления и постоянные времени. Выбранные технические средства определяют конкретную по каждому варианту структуру одноконтурной системы регулирования. После этого необходимо также выбрать датчик измерения основного возмущающего воздействия.
В результате строится принципиальная электрическая схема АСР и дается описание работы автоматической системы с указанием технических характеристик элементов автоматики и объекта регулирования.
После выбора типов, конструкций регуляторов, исполнительных механизмов, датчиков необходимо проставить размерности величин g(t), x(t), xр1(t), xр(t), y1(t), y(t) (размерности параметров объекта xр(t) и y1(t) известны по Вашему варианту задания). Размерности:
k рег |
xр1 (t) |
, kим |
xр (t) |
|
|
|
y (t) |
|
|
y(t) |
|
||||
|
|
|
, |
kоб |
1 |
|
, kдат |
|
|
. |
|||||
x(t) |
x |
р1 (t) |
xp |
(t) |
y1 |
(t) |
|||||||||
|
|
|
|
|
|
|
|
||||||||
Перемножить размерности коэффициентов передачи
|
x |
р1 (t) |
|
x р (t) |
|
y (t) |
|
y(t) |
|
|||||
kрег∙ kим∙ kоб∙ kдат= |
|
|
∙ |
|
|
|
∙ |
|
1 |
|
∙ |
|
. |
|
x(t) |
x |
р1 |
(t) |
x |
p |
(t) |
y (t) |
|||||||
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|||
После сокращения получим безразмерный коэффициент усиления системы
в разомкнутом состоянии k |
|
|
y(t) |
|
y(t) |
. |
раз |
|
|
||||
|
|
x(t) |
|
g(t) y(t) |
||
|
|
|
|
|||
1.5 Исследование статических, переходных и частотных характеристик объектов управления
Передаточная функция объекта по каналу управления имеет следующий
вид
W |
(P) |
Y (P) |
, |
|
|||
об g |
|
X p (P) |
|
|
|
||
где Y(P) – изображение по Лапласу регулируемого параметра объекта;
Xp(P) – изображение по Лапласу входного параметра объекта по каналу управления.
Рассмотрим передаточные функции объектов 1-го и 2-го порядка
5

|
Wоб g (P) |
|
kоб |
|
|
Y (P) |
, |
|
|||
|
Tоб P 1 |
X p (P) |
|
||||||||
|
|
|
|
|
|
|
|||||
для 1, 8, 12 варианта будет 2-го порядка |
|
||||||||||
Wоб g |
(P) |
|
|
kоб |
|
|
|
|
Y (P) |
, |
|
(Tоб1P |
|
|
|
|
|
|
X p (P) |
||||
|
|
1) (Tоб2 P 1) |
|
|
|||||||
где kоб – коэффициент усиления;
Тоб, Тоб1, Тоб2 – постоянные времени объекта по каналу управления.
Применив обратное преобразование Лапласа, получим дифференциальные уравнения
Tоб y (t) y(t) kоб x p (t) ,
Tоб1Tоб2 y (t) (Tоб1 Tоб2 ) y (t) y(t) kоб x p (t) ,
где y(t) – оригинал по Лапласу регулируемого параметра объекта;
xp(t) – оригинал по Лапласу входного параметра объекта по каналу управления. Для анализа переходного и установившегося процесса в объекте регулирова-
ния нужно показать сумму общего и частного решения дифференциальных уравнений первого и второго порядка
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y(t) k |
об |
x |
p |
(t) (1 e Tоб ) , |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
для 1, 8, 12 варианта будет 2-го порядка |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
t |
|
|
|
|
Tоб |
|
|
|
|
|
|
|
Tоб |
|
|
|
||||
|
|
|
|
T |
|
|
|
|
2 |
T |
||||||||
y(t) kоб x p (t) |
1 |
|
|
|
1 |
|
e |
об1 |
|
|
|
|
e об 2 |
. |
||||
|
|
|
|
Tоб1 Tоб2 |
||||||||||||||
|
|
|
Tоб1 Tоб2 |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Вматематическом пакете прикладных программ MathCAD провести расчет
ипостроить переходную характеристику y(t) объекта для единичного входного
воздействия по каналу управления xр(t) = 1(t). Для установившихся режимов построить статическую характеристику объекта у(хр). Сделать вывод об инерционных и статических свойствах объекта.
Вматематическом пакете прикладных программ MathCAD выполнить анализ свойств объекта в частотной области. Для этого в передаточных функциях объекта по каналу управления перейти от преобразования Лапласа к преобразованиям Фурье заменой P = jω, в результате получим частотную передаточную функцию объекта
Wоб g ( j ) Y ( j ) U ( ) jV ( ) ,
X p ( j )
где ω – круговая частота входных воздействий;
U(ω) – вещественная часть частотной передаточной функции; jV(ω) – мнимая часть частотной передаточной функции;
j 
 1 .
1 .
Амплитудно-частотная характеристика (АЧХ), логарифмическая ампли- тудно-частотная характеристика (ЛАЧХ) и фазово-частотная характеристика (ФЧХ) объекта имеют следующий вид
6
A( ) 
 U 2 ( ) V 2 ( ) ,
U 2 ( ) V 2 ( ) ,
Ai ( ) 20lg A( ) ;
( ) arctg V ( ) .
U ( )
Таким образом для объекта регулирования первого порядка получим следующие выражения частотных характеристик
АЧХ |
A( ) |
|
|
kоб |
|
|
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|||||
|
|
T |
2 |
2 1 |
|
|
|
||||
|
|
|
об |
|
|
|
|
|
|
|
|
ЛАЧХ |
A ( ) 20lg k |
об |
20lg |
T 2 2 |
1 ; |
||||||
|
i |
|
|
|
|
об |
|
|
|||
ФЧХ |
( ) arctg (Tоб ) . |
|
|
|
|||||||
Для объекта регулирования второго порядка частотные характеристики имеют следующий вид
АЧХ |
A( ) |
|
|
|
|
kоб |
|
|
|
|
; |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
T 2 |
2 |
1 T 2 2 1 |
|
|
|
|||||||||
|
|
|
об1 |
|
|
|
|
об2 |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|||||||
ЛАЧХ |
A ( ) 20lg k |
об |
20lg |
|
T 2 2 |
1 20lg |
T 2 2 |
1 ; |
|||||||||
|
i |
|
|
|
|
|
об1 |
|
|
|
|
об2 |
|
|
|||
ФЧХ |
( ) arctg (Tоб1 ) arctg (Tоб2 ) . |
|
|
|
|||||||||||||
Графики частотных характеристик объекта строить в частотном диапазоне ω = 0…1000 Гц, с шагом 0,01 Гц. Сделать вывод о приемлемом диапазоне пропускания частот входных воздействий по каналу управления.
1.6 Исследование статических, переходных и частотных характеристик датчика регулируемого параметра
Для определения передаточной функции датчика необходимо в справочной литературе, каталогах и сети Интернет найти диапазон изменения входных и выходных сигналов, и на этой основе определить его коэффициент усиления. Также необходимо определить постоянную времени датчика, если его передаточная функция описывается апериодическим звеном первого порядка.
После того как определены передаточная функция датчика и дифференциальные уравнения, в математическом пакете прикладных программ MathCAD строятся графики статической и переходной характеристик, а также графики частотных характеристик: АЧХ, ЛАЧХ и ФЧХ. В конце пункта необходимо сделать вывод о приемлемом диапазоне пропускания частот, инерционности и быстродействии датчика регулируемого параметра.
1.7 Исследование статических, переходных и частотных характеристик датчика возмущающего воздействия
Определив передаточную функцию датчика, в математическом пакете прикладных программ MathCAD необходимо построить графики статической и переходной характеристик, а также графики частотных характеристик: АЧХ, ЛАЧХ и ФЧХ. В конце сделать вывод о приемлемом диапазоне пропускания частот,
7
инерционности, быстродействии датчика возмущающего параметра.
1.8 Исследование статических, переходных и частотных характеристик автоматического регулятора
Для создания высококачественной системы автоматического регулирования необходимо из каталогов средств автоматизации, справочной литературы, электронных ресурсов сети Интернет выбрать современный ПИД-регулятор. Для анализа начального состояния системы регулирования нужно по технической характеристике регулятора взять средние параметры настройки – коэффициент усиления (предел пропорциональности), время изодрома, время предварения. По этим начальным параметрам настройки регулятора определить дифференциальное уравнение и передаточную функцию регулятора. В математическом пакете прикладных программ MathCAD построить графики статической, переходной характеристики регулятора, а также графики частотных характеристик: АЧХ, ЛАЧХ и ФЧХ.
Сделать заключения о динамических и частотных свойствах регулятора при его средних настройках: коэффициента усиления, времени изодрома, времени предварения.
1.9 Исследование статических, переходных и частотных характеристик исполнительного механизма
Студентом из справочной литературы, электронных ресурсов сети Интернет выбирается исполнительный механизм, для которого необходимо определить коэффициент усиления и постоянную времени. Для этого следует учитывать размерность входных и выходных сигналов механизма. Чаще всего исполнительный механизм представляет собой интегрирующее инерционное звено.
По этим данным составляются передаточная функция и дифференциальное уравнение. В математическом пакете прикладных программ MathCAD строятся графики статических, переходных и частотных характеристик: АЧХ, ЛАЧХ и ФЧХ. По результатам этих расчетов делается вывод о быстродействии механизма, о работоспособном в диапазоне частот входных воздействий регулятора на исполнительный механизм.
1.10 Анализ работоспособности, устойчивости системы регулирования методом Найквиста-Михайлова
Для получения передаточной функции системы в разомкнутом состоянии Wраз(P) необходимо выполнить произведение передаточных функций объекта по каналу управления Wобg(P), датчика регулируемого параметра Wдат(P), регулятора Wрег(P) и исполнительного механизма Wим(P)
Wраз (P) Wоб g (P) Wдат (P) Wрег (P) Wим (P) .
Осуществив в этой передаточной функции переход от преобразования Лапласа к преобразованию Фурье, получим частотную передаточную функцию системы в разомкнутом состоянии
Wраз ( j ) Wоб g ( j ) Wдат ( j ) Wрег ( j ) Wим ( j ) .
8
Используя инструменты для преобразования мнимых чисел математического пакета прикладных программ MathCAD, получим
Wраз( j ) U ( ) jV ( ) .
Впакете прикладных программ MathCAD на комплексной плоскости нужно построить амплитудно-фазовую частотную характеристику (АФЧХ) системы
вразомкнутом состоянии в частотном диапазоне ω = 0…1000 Гц, с шагом 0,01 Гц. На этом графике, проведя окружность единого радиуса, определяется запас устойчивости системы по амплитуде а и по фазе γ.
Если система регулирования окажется неустойчивой (ωс > ωπ), то необходимо изменить параметры настройки автоматического регулятора (коэффициент усиления, время изодрома, время предварения) в направлении вывода системы в устойчивое состояние и привести новые расчеты запасов устойчивости по фазе и амплитуде. Вывод должен отражать состояние системы с позиций устойчивости при окончательно принятых параметрах настройки регулятора.
1.11Анализ показателей качества системы
в замкнутом состоянии
Целью анализа является определение быстродействия (времени переходного процесса), динамического заброса (перерегулирования), колебательности, статической ошибки регулирования системы в замкнутом состоянии.
Используя полученную передаточную функцию системы с новыми параметрами настройки регулятора в разомкнутом состоянии по каналу управления Wраз(P), определим передаточную функцию системы в замкнутом состоянии
Wзам(P) |
|
Wраз(P) |
|
Y (P) |
, |
|
Wраз(P) |
|
|||
1 |
|
G(P) |
|
||
где Y(P) – изображение по Лапласу регулируемого параметра;
G(P) – изображение по Лапласу управляющего (задающего) воздействия.
Из этого выражения (при P d / dt ) получается дифференциальное уравнение системы в замкнутом состоянии
a |
|
d n y |
a |
d n 1 y |
... a |
|
dy |
a |
|
y b |
d m g |
b |
d m 1g |
... b |
dg |
b g , |
0 dt n |
|
n 1 dt |
|
|
|
|
||||||||||
|
1 dt n 1 |
|
|
n |
0 dt m |
1 dt m 1 |
m 1 dt |
m |
||||||||
где a0, a1, …, an-1, an, b0, b1, …, bm-1, bm – коэффициенты дифференциального уравнения;
y – оригинал по Лапласу регулируемого параметра; g – оригинал по Лапласу управляющего воздействия.
В математическом пакете прикладных программ MathCAD найти корни характеристического уравнения, приравняв нулю правую часть и определить показатели качества системы. Построить график изменения регулируемого параметра y(t) при скачкообразном единичном изменении управляющего воздействия g(t) = 1(t). Проанализировать показатели качества, определить необходимость некоторого повышения быстродействия и снижения динамического заброса.
Корни характеристического уравнения
Pi i j i i=1, 2, …, n,
9

отобразить на комплексной плоскости в пакете прикладных программ MathCAD (α, jβ), определить величину степени устойчивости
min |
|
i |
|
||
i |
|
|
и колебательность системы
I max |
i |
, |
i |
i |
|
где αi и βi – положительные коэффициенты. |
|
|
1.12 Анализ устойчивости системы регулирования методом годографа Михайлова
Устойчивость системы в замкнутом состоянии определяется методом годографа Михайлова, что позволяет определить близость системы к колебательной и апериодической границе устойчивости. Для этого следует воспользоваться характеристическим уравнением систем в замкнутом состоянии
D(P) 1 Wраз(P) a0Pn a1Pn 1 ... an 1P an 0 .
Из состояния системы во временной области нужно перейти в частотную область, заменой P = jω.
После этого преобразования характеристический полином будет иметь вид
D( ) Rе( ) jIт( ) ,
где действительная часть
Rе( ) an an 2 2 ...,
мнимая часть
Iт( ) an 1 an 3 3 ....
Произвести разделение характеристического уравнения на действительную и мнимую часть в математическом пакете прикладных программ MathCAD и построить на комплексной плоскости (Re(ω); jIm(ω)) при изменении частоты от 0 до ∞ годограф Михайлова и определить насколько близка система при принятых настройках регулятора к апериодической и колебательной границе устойчивости.
1.13 Определение необходимых настроек регулятора при синтезе систем комбинированного управления
Целью синтеза является определение необходимых настроек регулятора, параметров корректирующего устройства охвата обратной связью инерционных объектов регулирования и исполнительных механизмов, а также параметров блока коррекции, который делает систему инвариантной к самому сильному заданному возмущающему воздействию.
Необходимо внимательно проанализировать график амплитудно-фазовой частотной характеристики системы в разомкнутом состоянии (при анализе системы на устойчивость методом Найквиста-Михайлова), годограф Михайлова и принять решение об изменении коэффициента усиления регулятора kpег, величина которого входит в значение коэффициента аn характеристического уравнения.
10