

Учебник (Фалк, Арменский)
.pdf–31–
Рис. 2.6
Схема соединения катушек определяет число и расположение фаз и число полюсов в обмотке. На рис. 2.6 в качестве примера показано, как проводники одной обмотки при различной схеме соединения образуют магнитную систему с 1 или 2 парами полюсов. На рис. 2.7 показано образование трех- и двухфазной обмоток. В m - фазной машине каждый полюс создается проводниками всех m фаз, т.о число полюсов одной обмотки фазы равно числу полюсов всей m -фазной обмотки.
Рис. 2.7
Электрические машины с распределенными обмотками являются более сложными в изготовлении, чем машины с сосредоточенными обмотками. Тем не менее в машинах переменного тока в основном применяются распределенные обмотки. Объясняется это тем, что полезное преобразование энергии и сигналов в большинстве машин переменного тока идет по первой гармонике ЭДС, тока, индукции ; высшие гармоники
–32–
вызывают дополнительные потери мощности или погрешности преобразования сигналов. Сосредоточенные же обмотки не обеспечивают близкого к синусоидальному закона изменения МДС (соответственно, и индукции) в пространстве и ЭДС во времени.
Рис.2.8
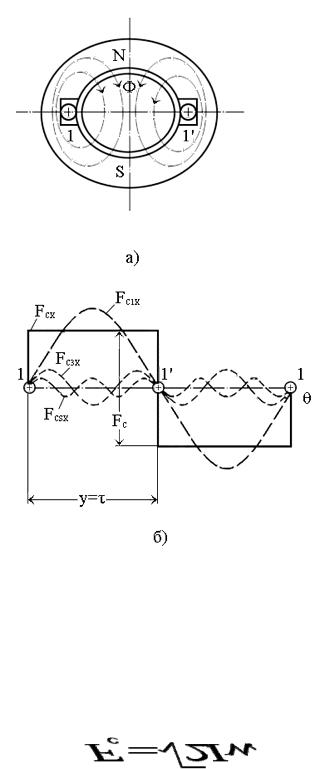
В качестве примера рассмотрим МДС двухполюсной сосредоточенной обмотки одной фазы. МДС такой обмотки 1 - 1' с числом витков w
(рис. 2.8,а) определяется по закону полного тока: при протекании синусоидального тока с действующим значением I амплитудное значение МДС равно (рис. 2.8.,б)
В машине с симметричной магнитной системой и одинаковым воздушным зазором в зоне обоих полюсов половина МДС

–33–
расходуется на проведение потока в зоне северного полюса и половина – в зоне южного полюса.Тогда можно принять, что любой точке полюсного деления соответствует постоянная МДС Fcx = Fc / 2, знак которой соответствует знаку индукции данного полюса.Следовательно,МДС распределена вдоль окружности машины по прямоугольному закону (сплошная линия на рис. 2.8,б); знак МДС меняется при переходе оси паза с проводниками. Применяя разложение в ряд Фурье, представляем прямоугольное распределение в виде суммы синусоид:
Fcx = |
2 |
Iw |
4 |
|
πx |
+ |
1 |
sin |
3πx |
+ .. + |
1 |
sin |
νπx |
|
2 |
π |
sin |
τ |
3 |
τ |
ν |
τ |
, |
||||||
|
|
|
|
|
|
|
|
|||||||
(2.5)
где x - расстояние от оси паза; ν - порядковый номер гармоники.
Как видно амплитуда первой гармоники МДС сосредоточенной обмотки равна
(2.6.)
а ν -й гармоники МДС FCV = 0,9 I W / ν.
Графики 1,3 и 5 гармоник МДС изображены на рис. 2.8,б пунктирными линиями. Как видно ν -я гармоника мдc создает вдоль расточки машины в ν раз больше магнитных полюсов, чем первая гармоника.
Анализ показывает, что амплитуды высших гармоник при сосредоточенной обмотке весьма велики. Распределение обмотки наряду с укорочением шага катушек относительно полюсного деления ( y / τ ), и скосом пазов относительно образующей цилиндрической расточки машины позволяет существенно уменьшить влияние высших гармоник. Однако эти же факторы приводят и к уменьшению амплитуды первой гармоники МДС и ЭДС.
Первая гармоника МДС распределенной обмотки может быть выражена через первую гармонику МДС сосредоточенной обмотки с тем же числом витков и обмоточный коэффициент
F1 = Fc1 Kоб. 1 = 0,9 I w Kоб. 1 . |
(2.7) |
Обмоточный коэффициент для первой гармоники Koб. 1 при распределенной обмотке несколько меньше 1; его конкретное значение зависит от схемы обмотки, шага катушек и скоса пазов.
Произведение wKоб. 1 называют эффективными витками обмотки
wэф.
–34–
Аналогично учитывается влияние распределения обмотки, укорочения шага и скоса пазов на ЭДС обмотки.
Принцип действия. Асинхронная машина, как и электрические машины других типов, является обратимой. Принцип действия асинхронной машины основан на электромагнитном взаимодействии вращающегося магнитного поля статора с токами, наведенными этим полем в роторе. Поскольку наведение ЭДС в роторе возможно только при неравенстве угловых скоростей ротора ω2 и магнитного поля статора ω1, то условие ω2 ≠ ω1 является обязательным для создания электромагнитного момента в любом режиме работы асинхронной машины. В качестве характеристики этого неравенства вводится понятие скольжения:
s = ω 1 − ω 2 .
ω 1
(2.8)
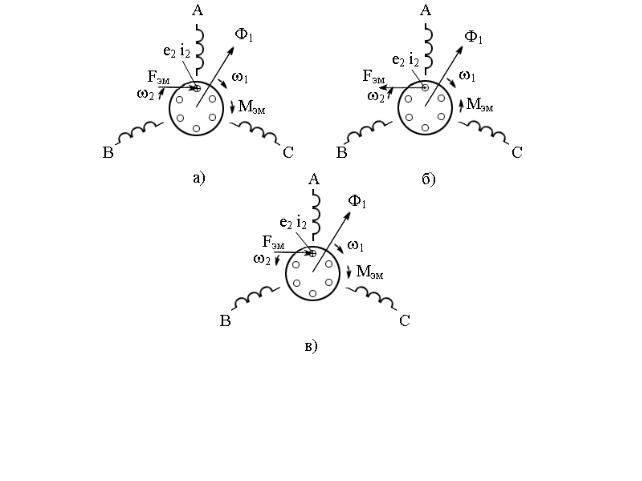
Работу асинхронной машины в различных режимах рассмотрим на примере машины с короткозамкнутым ротором.
Рис. 2.9
–35–
Пусть магнитное поле статора Ф1 и ротор вращаются в одну сторону и ω2 < ω1 (рис. 2.9,а). Направление ЭДС e2 ,наводимой в роторе, определяется по мнемоническому правилу правой руки. Токи ротора I2 во взаимодействии с полем статора создают электромагнитные силы Fэм, направление которых определяется по мнемоническому правилу левой руки.
Электромагнитный момент Мэм, создаваемый этими силами, направлен в сторону вращения ротора и разгоняет его в сторону поля, электрическая энергия сети преобразуется в механическую энергию на валу ротора, т.е. машина работает в режиме двигателя. Электромагнитный момент, развиваемый двигателем при неподвижном роторе, является пусковым моментом. Угловая скорость, до которой разгоняется ротор, тем больше, чем меньше момент нагрузки на валу двигателя. При отсутствии нагрузки угловая скорость ω2 стремится к ω1, но в реальных машинах никогда не достигает ее, т.к. при ω2 = ω1 проводники ротора не пересекают поле и Мэм = 0, а момент сопротивления нулю не равен - его создают силы трения в двигателе. Следовательно, теоретический диапазон работы асинхронной машины в режиме двигателя ω2 = 0 ÷ ω1, s = 1 ÷ 0. Режим двигателя является на практике основным режимом работы асинхронной машины.
Если магнитное поле статора и ротор вращаются в одну сторону и за счет подведения внешней механической энергии ω2 > ω1, то машина переходит в режим генератора (рис. 2.9,б). Однако трехфазные асинхронные машины в этом режиме используются крайне редко. Теоретический диапазон асинхронной машины в режиме генератора ω2 = 0
÷ ∞, s = 0 ÷ ( - ∞ ).
Если ротор вращается в сторону, противоположную магнитному полю статора (рис. 2.9,в), то электромагнитный момент Мэм направлен против направления вращения ротора и является тормозным. Происходит потребление электрической энергии из сети и механической энергии от устройства, вращающего ротор машины против поля. Вся потребляемая энергия выделяется в виде тепловой, и машина работает в режиме электромагнитного тормоза (торможение противовключением). Теоретический диапазон работы асинхронной машины в режиме торможения противовключением
ω2 = 0 ÷ ( - ∞ ), s = 1 ÷ ( ∞ )
Линейный асинхронный двигатель в простейшем случае можно получить, если вращающийся двигатель разрезать по диаметру и развернуть на плоскости. При этом магнитное поле получается не вращающимся, а бегущим, и электрическая энергия преобразуется в механическую поступательного движения.
–36–
§2.3. Асинхронный двигатель как обобщенный трансформатор
Можно показать, что физические процессы в асинхронном двигателе
имеют много общего с процессами в трансформаторе, и асинхронный двигатель можно анализировать на основе системы уравнений и схемы замещения, полученных для трансформатора.
Как и в трансформаторе, в двигателе имеется основной магнитный поток Ф0, сцепленный с проводниками статора (первичной обмоткой) и ротора (вторичной обмоткой). Этот поток вращается c угловой скоростью ω1 = 2πf1 / рМ, т.е. изменяется с частотой напряжения питания f1. При этом в обмотках статора и ротора наводятся ЭДС взаимоиндукции e1 и e2.
При замкнутой обмотке ротора поток Ф0 создается в результате взаимодействия МДС статора и ротора, неподвижных друг относительно друга. Действительно, частота тока в обмотке ротора прямо пропорциональна разности угловых скоростей поля и ротора и числу пар полюсов, т.е.
f 2 = |
(ω 1 − ω 2 )р м . |
|
2π |
(2.9)
Обмотка ротора является многофазной, и токи ротора создают МДС, вращающуюся относительно ротора с угловой скоростью ω22 = 2πf2 / рм = ω1 - ω2. Угловая скорость этой МДС относительно статора ω21 = ω2 + ω22 = ω1, т.е. МДС статора и ротора вращаются относительно статора с одной угловой скоростью. Воздействие МДС ротора на магнитное поде двигателя называется реакцией ротора. В асинхронных двигателях реакция ротора проявляется так же, как реакция вторичной обмотки в трансформаторах.
МДС обмоток статора и ротора создают потоки рассеяния, сцепленные каждый со своей обмоткой и наводящие ЭДС самоиндукции
еσ1 и еσ2.
Наряду с этими общими чертами, у асинхронного двигателя имеется
иряд отличий.
1.При уменьшении угловой скорости ротора ω2 увеличивается частота перемагничивания магнитопровода ротора и, соответственно, магнитные потери мощности в роторе на гистерезис и вихревые токи. Однако примерно в этой же пропорции уменьшаются механические потери на трение в подшипниках. В результате в двигателе можно условно выделить переменные, зависящие от нагрузки потери мощности -
электрические потери Рэ в обмотках, и постоянные потери - сумму магнитных Рм и механических Рмех потерь.
2. Согласно (2.9) и (2.8) частота токов в роторе
f2 = s f1, |
(2.10) |
–37–
т.е. она зависит от угловой скорости ротора и в двигательном диапазоне изменяется от f2 = f1 до f2 = 0. Это делает невозможным прямое использование векторных диаграмм и схем замещения трансформатора для анализа асинхронного двигателя.
Поступаем следующим образом.Выразим параметры вращающегося ротора через параметры неподвижного ротора ( s = 1 ), для которого согласно (2.10) f2 = f1 = const.
Выражение ЭДС обмотки фазы вращающегося ротора, записанное по аналогии с (1.7),
Е2вр = 4,44 f2 Фм w2.эф = 4,44 s f1 Фм w2.эф =s E2, |
(2.11) |
где ЭДС при неподвижном роторе |
|
Е2 = 4,44 f1 Фм w2эф, |
(2.12) |
Фм - амплитуда потока Ф0 , |
|
w2эф - число эффективных витков обмотки фазы ротора. |
|
Индуктивное сопротивление ротора |
|
x 2вр = 2π f2 Lσ2 = s x 2, |
(2.13) |
где x 2вр = 2π f2 Lσ2 - индуктивное сопротивление обмотки фазы неподвижного ротора; Lσ2 - индуктивность рассеяния.
Пренебрегая поверхностным эффектом будем считать, что R2 =
const.
Ток во вращающемся роторе по закону Ома
I 2 вр |
= |
E |
2 вр |
|
|
|
. |
|
(R 22 |
+ |
x |
22 |
вр ) |
||||
|
|
|
(2.14)
С учетом (2.11) и (2.13) формула (2.14) преобразуется следующим образом
I2вр = |
sE2 |
E2 |
+x2 ) |
(R22 +sx22 ) = |
((R /s)2 |
||
|
|
2 |
2 |
(2.15)
Как видно, ток ротора определен непосредственно через параметры неподвижного ротора и имеет частоту ЭДС неподвижного ротора. Поэтому индекс "вр" у тока ротора в дальнейшем опускается.
–38–
Фаза тока ротора, характеризуемая углом ψ2 между E2вр и I2,может
cos ψ 2 = |
R |
2(sx 2 )2 |
). |
(R22 + |
(2.16)
быть определена из выражения (2.16) .
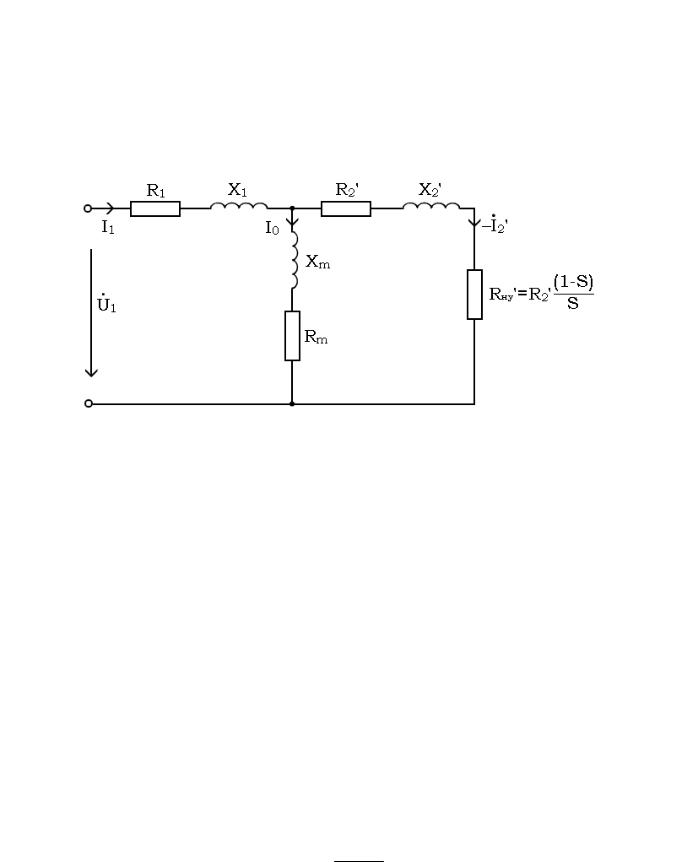
3. У двигателя нагрузка механическая, а у трансформатора - электрическая. Для учета этого различия представим активное сопротивление R2 / s в (2.15) как сумму R2 + R2 (1-s) / s. Тогда R2 соответствует электрическим потерям в обмотке ротора, а R2 (1-s) / s соответствует электрической мощности, преобразуемой в механическую. Поскольку s зависит от момента нагрузки, то сопротивление R2 (1-s) / s является эквивалентом механической нагрузки двигателя. Изменение этого сопротивления так же влияет на токи в обмотках и потребляемую мощность, как и изменение момента нагрузки на валу вращающегося ротора. Таким образом, короткозамкнутая обмотка вращающегося ротора асинхронного двигателя подобна вторичной обмотке трансформатора, включенной на условное сопротивление нагрузки:
Rну = R2 (1-s) / s . |
(2.17) |
Следовательно, асинхронный двигатель можно |
рассматривать как |
обобщенный трансформатор, у которого сопротивление Rну является эквивалентом механической нагрузки двигателя.
Как видно из (2.15), в двигательном диапазоне наибольший ток в роторе будет при пуске ( s =1). При идеальном холостом ходе двигателя,
т.е. при s = 0, ток I2 = 0.
Схема замещения. Схема замещения строится для приведенного асинхронного двигателя, у которого число фаз, расположение обмоток фаз и число витков в обмотке фазы ротора такие же, как на статоре. Приведение параметров ротора к числу фаз и витков обмотки статора осуществляется, как и у трансформатора, исходя из условия инвариантности мощности. Нетрудно показать, что формулы приведения для двигателя примут вид:
E2' = KeE2 ; I2' = I2 / Ki ; |
(2.18) |
Х2' = Ke Ki X2 ; R2' = Ke Ki R2, |
|
где Ke = w1. эф / w2. эф – коэффицент трансформации ЭДС; |
|
Ki = m1 w1. эф / m2 w2. эф |
– коэффицeнт трансформации тока; |
m1 и m2 - число фаз статора и ротора. В соответствии с выводами, сделанными в предыдущем разделе настоящего параграфа, в качестве схемы замещения приведенного асинхронного двигателя (в расчете на одну фазу) может использоваться схема замещения однофазного
–39–
трансформатора (см. рис. 1.6) с заменой сопротивления ветви нагрузки на условное сопротивления Rну по (2.17). Получающаяся схема замещения двигателя изображена на рис. 2.10.
Рис. 2.10
§ 2.4. Основные характеристики трехфазных асинхронных двигателей Электромагнитный момент. Полная механическая мощность двигателя создается в результате вращения ротора с угловой скоростью ω2 под действием момента Мэм т.е.
Рмех = Мэм ω2 . |
(2.19) |
Эта мощность может быть определена по схеме замещения как электрическая мощность, выделяющаяся на условном сопротивлении нагрузки Rну', умноженная на число фаз статора:
(2.20)
Pмех = m1 (I2' )2 R2' 1 −s s .
–40–
На основании (2.19) и (2.20) с учетом (2.8) можно записать
Mэм = m1(I2' )2 R2' /s.
ω1
(2.21).
При расчете момента по формуле (2.21) ток I2' определяется по схеме замещения (рис. 2.10 ) для соответствующего скольжения.
Формулу (2.21) можно преобразовать, подставив в нее выражение для тока I2', получаемое при определенных допущениях из схемы замещения
mU 2R' / s
Mэм =ω1[(R1 +CR12' /1s)2 2+(x1 +Cx2' )2 ].
(2.22)
Коэффициент C, входящий в формулу (2.22), есть модуль комплексного коэффициента С = 1 + ( z1 / zм ), появляющегося в ходе преобразования. Допущение заключается в учете только модуля коэффициента С, т.к. его аргумент в реальных машинах очень мал. В реальных машинах (исключая микромашины) С = 1,03–1,08 и при качественном анализе иногда принимают С = 1
Выражение (2.21) можно также преобразовать, выразив активное падение напряжения в роторе I2' R2' / s через ЭДС на основании формул
(2.15) и (2.16)
|
I2' R2' / s = E2' cos ψ2. |
(2.23) |
Подставляя (2.23) в (2.21) и выполняя преобразования с учетом (2.18) |
||
и (2.12) получаем |
Mэм = k Фм I2' cos ψ2 , |
|
|
(2.24) |
|
где конструктивный коэффициент |
|
|
k = |
m 1 p m w 1 эф . |
|
|
2 |
|
Как видно из (2.24), электромагнитный момент прямо пропорционален основному магнитному потоку Фм и активной составляющей тока ротора I2' cos ψ2.