температура воздуха от 0° до +30°С (-5°+35°С);
скорость ветра – до 10 м/с;
10.Для взлета и посадки достаточно площадки 50х50 м;
11.Взлет с рук, посадка на фюзеляж модели.
Наземное оборудование:
1.Радиус приема теле-, видеоизображения – до 2 км;
2.Рабочая частота – от 1,2 до 2,4 Ггц;
3.Частоты управления радиоуправляемой авиамоделью: пульт управления - 35÷41 МГц (с разбивкой по каналам);
4.Электропитание наземного оборудования – 7,2 В; 9,6 В; 12 В;
5.Прием телеметрических и «GPS» данных на частоте от 0,9 до 2,4 Ггц.
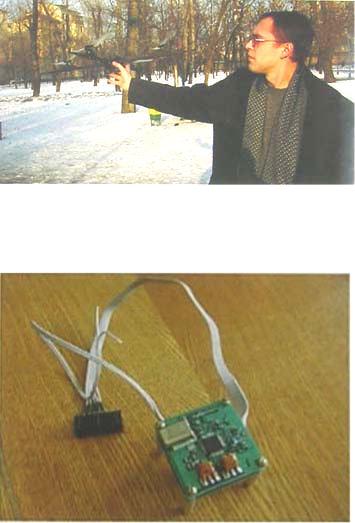
3.БПЛА"ПУСТЕЛЬГА"
ВНИИ прикладной механики им. акад. В.И. Кузнецова разработан уникальной летающий микроробот "Пустельга", в корне меняющий представления о возможностях беспилотных авиационных комплексов
Мобильные комплексы (МК) на основе автономно пилотируемых летательных микроаппаратов (АП ЛМА) предназначены для локального мониторинга экологических систем, решения топофизических и специальных задач. Их основное преимущество - низкая стоимость по сравнению с космическими аппаратами, самолетами, вертолетами и дистанционно пилотируемыми
летательными аппаратами. Разработка автономно пилотируемых летающих микророботов и мобильных комплексов базировалась на имеющемся в НИИ ПМ опыте работ по созданию микромеханических чувствительных элементов, бесплатформенных инерциальных блоков и интегрированных бесплатформенных инерциальных систем.
Мобильный комплекс - это аппаратура управления (ДУ) и летательный микроаппарат, разработанный в виде винтокрылой летающей тарелки с электрическими двигателями, работающими от аккумуляторной батареи. Поэтому аппарат отличается крайне низкой акустической заметностью (практически неслышим). В состав аппаратуры, размещенной на ЛМА, входят: радиоинерциальная навигационная система, включающая радиоприемник GPS и бесплатформенную
инерциальную навигационную подсистему на основе микромеханических вибрационных гироскопов и микромеханических акселерометров, видеокамера со стабилизированным полем зрения, приемопередающая аппаратура построения видеоизображения, отображения
информации о местоположении ЛМА и формирования команд управления. АУ состоит из мобильного компьютера, радиоприемника GPS и наземной приемопередающей аппаратуры. На монитор мобильного компьютера выводятся: цифровая карта местности, координаты местоположения оператора и ЛМА, его маршрут и видеоизображение сканируемой поверхности. В качестве дополнительной целевой нагрузки возможен вариант размещения на ЛМА приборов и датчиков различного назначения, например для сбора радиолокационной информации, биологического или химического контроля окружающей среды. По нашему мнению, АП ЛМА "Пустельга" - один из наиболее перспективных вариантов, выполненных по вертолётной схеме.
Комментарий:
БПЛА "Пустельга" представляет собой очень эффективное изделие - поистине шаг в будующее. Его уникальные характеристики позволяют использовать его для оперативной разведки вражеских позиций, для целеуказания средствам непосредственной огневой поддержки, артиллерии и авиации. Габариты микроробота позволяют не только располагать аппаратуру запуска (может взлеть и вовсе без неё) и управления на лёгких шасси, а даже снабдить ею отдельного человека (к примеру, командира взвода). А на современном танке и вовсе можно разместить 5-10 таких БПЛА, обеспечив фактически бесперебойное поступление разведданных. В то же время, борьба с подобными роботами является весьма трудной задачей. "Пустельга" имеет крайне малую заметность во всех диапазонах - звуковом, оптическом, радиолокационном. Огонь из стрелкового оружия по БПЛА вряд-ли будет эффективным ввиду его небольших габаритов, ЗСУ будет трудно взять такой БПЛА на прицел, а одна зенитная ракета, даже самая дешёвая, стоит в разы дороже "Пустельги". Да и не под силу современным ЗРК и ПЗРК сбить такой малогабаритный аппарат. Потенциально российскую армию можно оснастить легионами подобных БПЛА, многократно повысив ударную мощь сухопутных подразделений. Также имеет смысл эксплуатация подобных аппаратов милицией, пограничниками, рыбнадзором и многими другими службами. Мы искренне надеемся, что "Пустельга" дойдёт до стадии серийного производства и будет активно эксплуатироватся в нашей стране - как в армии, так и в гражданском секторе
ТАКТИКО-ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ БПЛА "Пустельга"
Масса: |
|
|
БПЛА |
менее 5 |
кг |
АП ЛМА |
менее 0,3 |
кг |
продолжительность полёта, часов |
1 |
Скорость полёта, км/ч |
54 |
Дальность полёта, км |
5 |
Площадь визируемой поверхности
50х50
в кадре с высоты 150 м
Пространственное разрешение
0,2
видеоаппараратуры с высоты 150м, м
Точность привязки кадра к
5-10
электронной карте местности, м
ПРЕДИСЛОВИЕ
Курс лекций включает: 1. Из курса лекций кандидата технических наук профессора, заведующего кафедрой «Фотограмметрия» МИИГАиК А. П. Михайлова разделы 1-5 главы 3 главы 4,5, раздел 9 главы 6; 2. Из курса лекций «Фотограмметрия» кандидата технических наук доцента А. С. Назарова, который даётся для студентов географического факультета Белорусского государственного университета, следующие главы и разделы: раздел 4 введения; разделы 1-8 главы 1; глава 2, разделы 6-10 главы 3; разделы 1-8,10 главы 6; главы 7,8; разделы 1-3 главы 9.
В курсе лекций использованы статьи и лекции о воздушном лазерном сканировании кандидата технических наук Е. М. Медведева, которые опубликованны в журнале «ГеоПРОФИ» и размещённые на сайтах компаний «ГЕОКОСМОС» и «ГеоЛИДАР». Использован ряд статей других авторов, посвящённые системам спутниковой навигации ГЛОНАСС и GPS, применению БПЛА, а также информация компании «Совзонд», опубликованная на сайте, в частности, из раздела: «Статьи о ДЗЗ».
Приложение № 2
Легкие цифровые аэросъемочные комплексы DSS
Обзор системы
Легкие цифровые аэросъемочные комплексы DSS (Digital Sensor Systems) – это цифровая интегрированная высокопрочная система для выполнения аэрофотосъемочных работ и создания ортофотомозаики. DSS включает цифровую камеру 4К х 4К, систему прямого геопозиционирования POS AV, и систему управления аэрофотосъемочным процессом. В составе цифровой камеры используется матрица CCD с размером пикселя 9 мкм, что позволяет регистрировать отдельные детали на земле размерами от 0.15м до 1 м, используя 35 и 55 мм объективы.
В основном DSS используется для создания ортофотоснимков и ортофотопланов высокого разрешения в видимом и ближнем инфракрасном диапазоне. Данные DSS могут быть непосредственно использованы коммерчески доступными фотограмметрическими пакетами для быстрого получения готовых топографических карт и планов. Ортофотоснимки создаются с использованием снимков DSS и Цифровых моделей рельефа.
Ортофотоснимки и ортофотомозаика могут использоваться в разных приложениях, включая ГИС, цифровую картографию и для обработки данных дистанционного зондирования. Например, обновление и поддержание баз данных ГИС, классификация и картографирование территорий, идентификация заболоченных земель, обновление карт землепользования, оценка урожая, подготовка инвентаризации вырубки, планирование новых мест застройки, проверка территорий на лицензии и разрешения. Многие из этих приложений имеют дело с малыми локализованными участками, коридорами и отдельными точечными снимками, что делает среднеформатную систему типа DSS подходящим инструментом для выполнения таких работ.
Технические характеристики
1. |
Камера |
|
|
Размеры матрицы |
4092 (продольный)x |
|
|
4077 (поперечный) |
|
Размер точки |
0,009 мм |
|
Линзы Zeiss |
Стандарт:55мм, 37 поле зрения (CIR/VIS) |
|
|
Опция: 35мм, 55.4 поле зрения (только VIS) |
|
Управление экспозицией |
Ручное, Приоритет диафрагмы, Приоритет |
|
|
выдержки |
|
Измерение экспозиции |
Центральное средневзвешенное, или точечное |
|
Затвор |
Фокальная плоскость электронно-управляемая |
|
Выдержки |
125-4000 (меньшие скорости не рекомендуется) |
|
Отношение |
1:1 |
|
Коэффициент заполнения |
70% |
|
Компенсация Экспозиции |
+/-2 EV с шагом 1/3 EV |
|
Максимальная выдержка |
4 сек |
|
Сенсор собственное крепление CCD, упрочненный каркас с |
встроенным IMU, разработан для сохранения геометрической точности 1 пиксель при ударно-вибрационных воздействиях
Калибровка Наземная и Воздушная калибровка с полным отчетом
2. Компьютерная система |
|
Накопитель данных |
Внутренний герметичный 80ГБ диск |
|
съемные 80 ГБ диски (2) |
Навигация и определение |
Интегрированная GPS/Инерциальная POS/AV |
2
местоположения |
система |
Система управления полетом |
Отдельный дисплей пилота, полное планирование |
|
задачи, режим управления только пилотом или |
|
только оператором |
Проверено и удовлетворяет спецификациям RTCA/DO-106D по ударам и вибрации когда монтируется в поставляемый ударо и виброизолирующий или блок, или транспортировочный ящик
3. Характеристики
|
Точность, СКО |
|
C/A GPS |
DGPS |
Постобработка |
|
|
Координаты (м) |
4.0-6.0 |
|
0.3-2 |
0.05-0.3 |
|
|
|
|
|
Скорость (м/с) |
|
|
|
0.1 |
|
0.05 |
0.005 |
|
|
Тангаж и крен |
|
|
|
|
|
|
|
|
|
|
(градусы) |
0.0015 |
|
0.010 |
0.008 |
|
|
Истинный Курс |
|
|
|
|
|
|
|
(градусы) |
0.08- |
|
0.050 |
0.015 |
|
|
|
0.016 |
|
|
|
|
|
Радиометрия: Повторяемость 3% |
|
|
|
|
Диапазоны |
1 |
|
2 |
3 |
|
|
|
|
|
|
|
Режим цвет, нм |
400-500 |
|
500-600 |
600-680 |
|
|
|
|
|
|
|
Режим CIR, нм |
510-600 |
|
600-720 |
720-920 |
|
|
|
|
|
|
|
Съемка GSD: 0.05 до 1 м (зависит от платформы). Съемка Смаз: <10% обычно, 25% |
|
макс. для максимальной скорости 200 узлов |
|
|
|
|
4. Физические параметры |
|
|
|
|
|
Головка датчика камеры |
|
250x310x36мм |
|
|
Лоток крепления камеры |
|
180x180x360мм |
|
Размеры |
Компьютер |
|
500x570x520мм |
|
|
|
|
|
(включая ударо-поглощающий отсек) |
|
|
Камера с креплением |
|
9кг (55мм линзы) |
|
Вес |
Компьютер |
|
21кг |
|
Питание |
Компьютер |
28В пост 280Вт (макс)включая камеру |
|
|
|
|
|
|
|
Температурны |
Камера |
|
0 +40°С |
|
й диапазон |
Компьютер |
|
-20°С +55°С |
|
Влажность |
|
|
|
5 до 90%, без конденсата |
|
относительная |
|
|
|
|
|
|
|
Высота |
|
|
|
1 – 20000 футов (0 – 6 км) |
|
|
|
|
|
|
|
|
5. Программное обеспечение для обработки данных
Производит готовые к печати снимки и данные внешнего ориентирования
Обзор задачи
ПО управления данными
Выгружает снимки из съемных дисков
Просмотр снимков
ПО обработки снимков
Исправление искажений линз < 3%
Форматы: TIFF, JPEG, IMG
Оцифровка: 8бит, 12бит
Балансировка цвета по данным калибровки
POSPAC
POSGPS: Обработка DGPS
POSProc: Обработка GPS/Инерциальных данных
POSEO с POSCal: вычисление данных внешнего ориентирования и калибровка направления оси камеры/IMU
Минимальные системные требования
ПК с Windows 2000
Минимум 300ГБ на диске (512МБ RAM)
Корпус Tower с местом под размещение блока Kingston Removable Data
Frame (поставляется)
Рекомендуемые области применения:
Топографическое картирование в масштабах 1:2000 и мельче;
Создание ортофотопланов и ортофотокарт высокого разрешения в видимом и ближнем инфракраcном диапазоне;
Создание и актуализация ГИС;
Цифровая картография;
Дистанционное зондирование;
Идентификация заболоченных земель;
Обновление карт землепользования;
Таксация леса;
Планирование новых мест застройки;
Обследование и инвентаризация ЛЭП, нефте- и газопроводов, автомобильных и железных дорог, инженерных коммуникаций;
Экологические исследования;
Сельскохозяйственные исследования.
Основные преимущества:
Радикальное сокращение длительности технологического цикла обработки аэрофотосъемочных материалов за счет использования полностью цифровых методов регистрации и обработки и переход на аппаратные методы определения элементов внешнего ориентирования снимков.
Является аэрофототопографическим средством и может быть использовано в различных приложениях топографо-геодезического или инженерно-изыскательского типов, а также как средство авиационного дистанционного зондирования.
Система цифровой аэрофотосъемки DSS идеально подходит для решения самых разнообразных аэрофотосъемочных задач.
Материалы аэросъемки
Ниже представленны аэроснимки (Рис.1 и Рис.2), созданные с использованием цифровых аэросъемочных комплексов DSS. Разрешение аэроснимков уменьшено. В
качестве примера более детальная информация показана на ортофотоснимке фрагмента города Новый Орлеан (Рис. 3).
Ортофотоснимок города Новый |
Ортофотоснимок Университета |
Орлеан, Луизиана, США (Рис. 1) |
Коннектикута, США, (Рис. 2) |
Фрагмент ортофотоснимка (Новый Орлеан,
Приложение № 3
-3
Geomatica
. Он поставляет на коммерческий разрешением 1 метр и ширина полосы съемки равна 8 км. официальным дистрибьютором компания "Совзонд". программного продукта Geomatica BASICTM с применением Точной
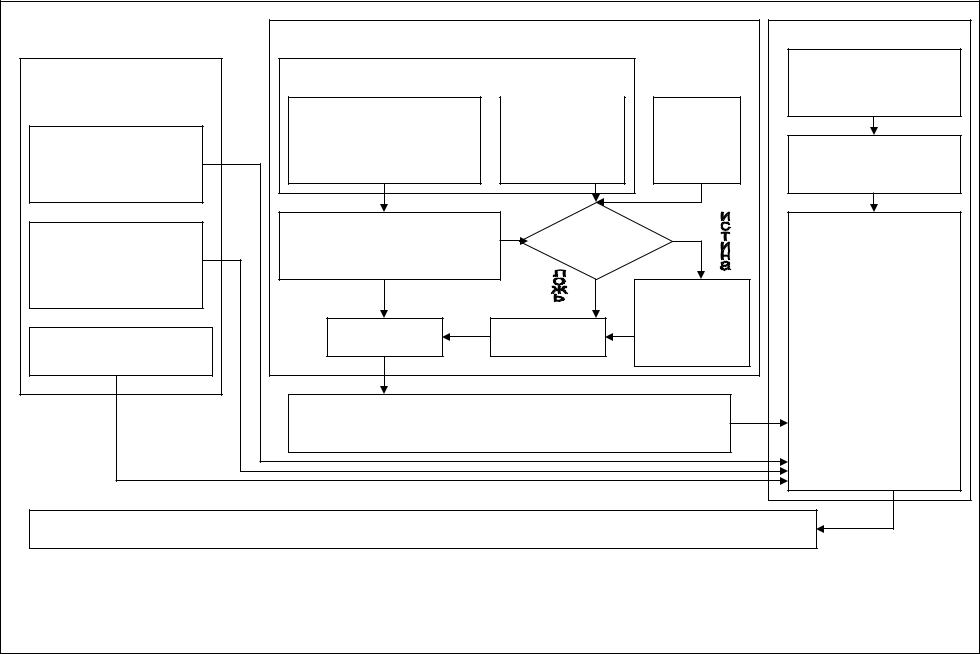
щелкните пункт New в меню File. Введите имя файла для вашего нового проекта и выберите Satellite Orbital Modeling в качестве метода математического моделирования. В Опциях выберите Toutin's Model, и щелкните Accept. OrthoEngine
предложит Вам определить параметры выходных файлов, размер пиксела результирующего продукта и проекцию Ваших наземных опознавательных знаков (GCP). Введите соответствующую информацию для нового проекта.
Для использования Точного Моделирования с Geomatica OrthoEngine Вы можете заказать продукт OrbView BASICTM. Продукты OrbView ORTHOTH уже являются ортотрансформированными и не могут быть подвергнуты повторному ортотрансформированию. За дополнительной информацией об этих продуктах, пожалуйста, обращайтесь на сайт компании ORBIMAGE (www.orbimage.com).
Данные OrbView-3 могут поставляться по умолчанию в форматах GeoTIFF, TIFF или NITF 2.0. Geomatica OrthoEngine поддерживает все эти форматы. Данные поставляют с несколькими файлами поддержки. При считывании данных эти файлы должны быть расположены в том же каталоге, что и данные изображения.
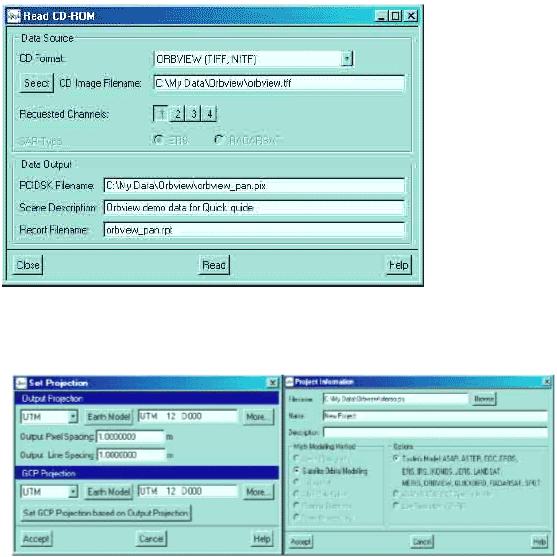
Чтобы импортировать данные OrbView для проведения ортотрансформирования, выберите операцию Data Input (Ввод данных), и затем выберите Read Data From CD-ROM (Читать Данные с CD-
ROMа). Этот выбор также применяется для чтения с жесткого диска данных, которые были скопированы с CD-ROMа.
В качестве CD Format (Формат компакт-диска) выберите OrbView. Вы можете просмотреть соответствующий Tiff или NITF файл, используя кнопку Select. Выберите 1 для Requested channels (Требуемых каналов) если считывается панхроматическое изображение. Выберите 1 - 4, если
изображение мультиспектральное. Обратите внимание, что панхроматические и мультиспектральные изображения должны быть помещены в отдельные проекты, так как они имеют разные пространственные разрешения. Задайте имя для выходного файла продукции, описание сцены и название файла отчета. Когда выберите и заполните все необходимые данные в этой панели, щелкните кнопку Read.
Выберите следующую операцию - Select the GCP/TP Collection (Выбрать набор опознавательных
знаков и точек привязки). Выбирать наземные опознаки для проекта, можно несколькими способами: из геокодированных изображений, из векторов, из частичной базы данных или из текстового файла, можно также вводить данные с клавиатуры. Также можно выбрать пункты геопривязки для того чтобы собрать разрозненные сцены в единое целое отчетов для просмотра начальных результатов.
Этот шаг соответствует операции Reports processing (Выполнение отчетов).