

2385
.pdfв которых:
lx, ly – калиброванные значения расстояний между координатными метками;
xci,yci – координаты координатных меток в системе координат цифрового изображения.
Параметры a0, b0 определяют, как координаты xc, yc точки пересечения прямых линий, проведенных через координатные метки 1-2 и 3-4, по формулам:
a0 |
|
yc4 yc1 a1x1 a2 x4 |
|
a1 a2 |
|||
|
|
|
|
|
|
, |
(6.31) |
|
b y |
|
a a |
|
x |
|
y |
|
a |
|
a |
|
x |
|
|
c1 |
0 |
c1 |
c4 |
2 |
0 |
c4 |
|
|||||||
0 |
1 |
|
|
|
|
|
|
в которых:
ayc2 yc1
1xc2 xc1
.
yc3 yc4b
1 |
|
|
xc3 xc4 |
Для определения координат точек снимка в системе координат цифрового изображения по координатам этих точек в системе координат снимка используют формулы:
|
|
|
|
1 |
|
|
|
|
|||
x |
c |
a |
0 |
|
|
|
|
cos x sin y |
|
|
|
|
|
|
|
||||||||
|
|
|
|
kx |
|
|
|
|
|||
|
|
|
|
|
|
|
|
, |
(6.32) |
||
|
|
|
|
|
1 |
|
|
||||
y |
c |
b |
|
|
|
sin x cos y |
|
|
|||
|
|
|
|
|
|||||||
|
0 |
|
|
k |
y |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
в случае, если калиброванные расстояния lx, ly между координатными метками известны, и формулы:
xc |
a0 |
cos x sin y |
(6.33) |
yc |
b0 |
, |
|
sin x cos y |
|
в случае если, калиброванные расстояния lx, ly не известны.
Необходимо заметить, что в связи с тем, что система координат цифрового изображения левая, в формулах 6.27 – 6.33 координата yc берется с обратным знаком.
Определение пиксельных координат точек изображения производят по формулам (6.26).
9.4. Методы создания цифровых
трансформированных
изображений местности
(объекта).
1.1.1.1.1.1.1.
Рассмотрим процесс цифрового
трансформирования исходного снимка на
примере его преобразования
в цифровое трансформированное изображение, представляющее собой ортогональную проекцию
местности на
112

горизонтальную плоскость (ортофотоснимок).
Принципиальная схема этого процесса представлена на рис. 6.23.
В результате цифрового трансформирования исходный снимок преобразуется в цифровое изображение местности, представляющее собой ортогональную проекцию местности на горизонтальную плоскость.
Исходными материалами при цифровом трансформировании снимков служат: - цифровое изображение исходного фотоснимка; - цифровая модель рельефа (ЦМР)
- значение элементов внутреннего и внешнего ориентирования снимков; - значение параметров внутреннего ориентирования снимка в системе
23 координат цифрового изображения.
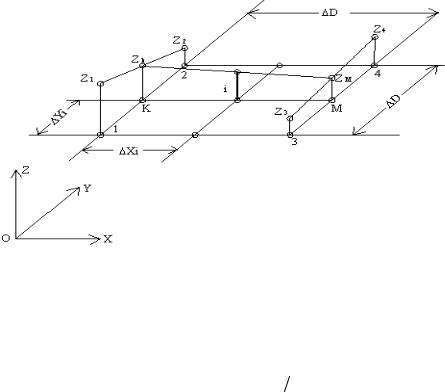
1.1.1.1.1.1.1.1.В большинстве случаев при трансформировании снимков используется цифровая модель местности в виде матрицы высот, представляющей собой регулярную сетку квадратов на местности, стороны
которых параллельны осям X и Y системы координат объекта 0XYZ. Координаты и высоты узлов сетки квадратов определены в системе координат
объекта.
Для формирования ЦМР в виде матрицы высот, в большинстве случаев, используют цифровые модели рельефа, созданные в результате стереофотограмметрической обработки снимков или по уже существующим топографическим картам.
Наиболее распространённым методом построения цифровых моделей рельефа местности является, в настоящее время, метод триангуляции Делоне, в котором рельеф местности представлен в виде пространственной сети треугольников, координаты и высоты вершин которых определены в системе координат объекта. Рельеф местности в пределах треугольника в этом виде ЦМР, аппроксимируется плоскостью, проведённый через его вершины.
При формировании ЦМР этим методом по высотным пикетам треугольники генерируются под условием, чтобы в окружность, проведенную через вершины треугольников, не должны попадать вершины других треугольников.
По цифровой модели рельефа в виде триангуляции Делоне можно сформировать ЦМР в виде матрицы высот.
На рис. 6.24 представлены фрагменты ЦМР местности в виде матрицы высот и в виде триангуляции
Делоне.
Для определения высоты узла i |
матрицы высот, по |
координатам xi и yi этого узла в l |
системе координат |
объекта находят вершины треугольника триангуляции |
|
Делоне, в котором находится узел i. |
|
Значение высоты узла i определяют по формуле: |
|
Zi = A + BXi + CYi |
(6.34) |
k
m
i
1.1.1.1.1.1.1.1.1.
1.1.1.1.1.1.1.1.2. Рис. 6.24 Выражение
(_2.1) представляет собой уравнение плоскости проведенной через вершины l, k, m треугольника, внутри которого находится узел i.
Коэффициенты уравнения (6.34) A, B и C получают в результате решения системы из трёх уравнений:
A + BX + CY ─ Z = 0, |
(6.35) |
составленных по значениям координат X, Y и высот Z каждой из вершин l, k, m треугольника.
Цифровое трансформирование снимка выполняется следующим образом.
Сначала формируется прямоугольная матрица цифрового трансформированного изображения, строки и столбцы которой параллельны осям X и Y системы координат объекта, а координаты одного из углов матрицы заданы в этой же системе координат.
113
Размер элементов (пикселей) матрицы обычно выбирают приблизительно равной величине×m, в которой:
-- размер пикселя цифрового изображения исходного снимка;
-m - знаменатель среднего масштаба снимка.
Значения координат начала системы координат создаваемой матрицы, выбирают кратными величине элементов матрицы.
Для формирования цифрового трансформированного изображения, каждому элементу цифрового изображения a ij необходимо присвоить оптическую плотность изображения соответствующего участка объекта на исходном цифровом снимке. Эта операция выполняется следующим образом. По значениям индексов i и j элементов матрицы a ij определяются координаты X, Y центра соответствующего
пикселя цифрового трансформированного изображения в системе координат объекта.
По координатам Xi, Yi точки объекта, соответствующей центру пикселя, по цифровой модели рельефа определяется высота этой точки Zi.
Определение значения Zi по ЦМР в виде матрицы высот выполняется методом билинейного интерполирования (рис. 6.25).
На рис. 6.25 X = Xi - X1, а Y= Yi - Y1, где X1 и Y1 - координаты узла 1 цифровой модели рельефа. Высота точки Zi вычисляется по формуле:
Zi |
ZK |
|
ZM ZK |
D Xi , |
(6.36) |
||||||
в которой: |
|
|
|
|
|
|
|
|
|
|
|
Z |
K |
Z |
1 |
|
Z2 Z1 |
|
Y |
|
|
||
|
|
|
|
||||||||
|
|
|
|
D |
i |
|
|||||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
Z4 Z3 |
|
. |
|
|
Z |
M |
Z |
3 |
|
Y |
|
|||||
|
|
||||||||||
|
|
|
|
|
D |
|
i |
|
|||
|
|
|
|
|
|
|
|
|
|
||
По координатам Xi, Yi, Zi и значениям элементов внутреннего и внешнего ориентирования снимка вычисляются координаты х,у соответствующей точки на исходном цифровом снимке в системе координат снимка Sхуz.
Вычисления производятся по формулам:
x x0 |
f |
x* |
|
|
|
||
|
|
|
|
|
|
||
|
z* |
|
|
||||
|
|
|
|
, |
(6.37) |
||
|
|
|
y* |
|
|||
y y0 |
f |
|
|
|
|||
z* |
|
|
|
||||
|
|
|
|
|
|
||
в которых |
|
|
|
|
x* |
|
X XS |
||
|
|
A |
T |
|
y* |
|
Y YS . |
||
|
|
|
|
|
z* |
|
|
Z ZS |
|
По координатам х,у и значениям параметров внутреннего ориентирования цифрового изображения определяют координаты точки снимка в системе координат цифрового изображения осхсус.
В случае использования аффинных преобразований при выполнении внутреннего ориентирования, определение координат выполняется по формулам:
114
xc |
P |
1 x a0 |
A1 |
A2 x a0 |
|||
|
|
|
|
|
|
|
|
yc |
|
y b0 |
B1 |
B2 y b0 |
|||
Затем по координатам хС и уС вычисляются пиксельные координаты точки
|
|
|
xc |
|
x p |
|
|
. |
|
|
||||
|
|
|
|
|
yp |
|
|
yc |
|
|
|
|
||
|
|
|||
|
|
|
|
|
По значениям пиксельных координат xp,yp точки цифрового изображения снимка, которая является проекцией центра пикселя матрицы цифрового трансформированного изображения, находят ближайшие к этой точке четыре пикселя цифрового изображения снимка. А затем, методом билинейной интерполяции, изложенным выше, по формулам (6.20) определяют значение оптической плотности Di или цвета соответствующего пикселя матрицы цифрового трансформированного изображения. При этом значение величинxp, yp в формулах (6.20) определяют по формулам:
x p x pi xpk .
yp ypi ypk
Таким же образом определяются оптические плотности или цвет всех остальных пикселей цифрового трансформированного изображения.
Помимо метода билинейной интерполяции для формирования цифрового трансформированного изображения применяют метод “ближайшего соседа”, в котором по пиксельным координатам xp,yp находят пиксель цифрового изображения снимка, на который проектируется точка, соответствующая центру пикселя цифрового трансформированного изображения, и значение его оптической плотности или цвета присваивается пикселю цифрового трансформированного изображения.
Метод “ближайшего соседа” позволяет сократить время формирования цифрового трансформированного изображения по сравнению с методом билинейной интерполяции, однако изобразительные свойства формируемого цифрового изображения при этом ухудшаются.
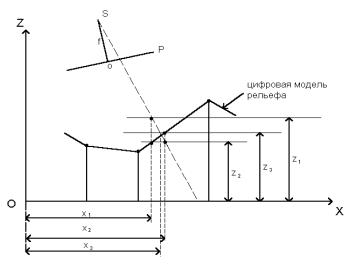
Если превышения точек на участке местности, изображенной на снимке, незначительны, то при создании цифрового трансформированного изображения поступают упрощенно. Значения высот точек местности, соответствующие центрам пикселей трансформированного изображения, принимаются равными для всех смежных участков.
В этом случае, нет необходимости в создании цифровой модели рельефа местности, так как трансформированное цифровое изображение представляет собой центральную проекцию исходного снимка на горизонтальную плоскость, расположенную на высоте Z, равной среднему значению высоты участка местности. Такой метод трансформирования допустим в случае, если ошибки в положении точек на трансформированном изображении, вызываемые рельефом местности, не превышают допустимых значений.
Величины максимально допустимых значений превышений точек местности – h max относительно средней плоскости, при которых ошибки в положении точек на трансформированном изображении не будут превышать установленного допуска R max , можно определить по формуле:
h max = |
f |
Rmax , |
(6.38) |
|
|||
|
r |
|
|
в которой:
f – фокусное расстояние съёмочной камеры;
r – расстояние на исходном снимке от главной точки до точки на снимке.
115

Как следует из формулы (6.38), величина ошибки, Rmax прямо пропорционально значению r. Поэтому при определении hmax измеряется значение r до наиболее удаленной от главной точки снимка точки, участвующей в формировании трансформированного изображения.
Следует отметить, что формулы (6.38) используют только в случае, если трансформирование выполняется по снимкам, углы наклона которых не превышают 3 - 5 .
Аналогичным образом можно определить величину допустимой ошибки hmax определения высот точек местности, соответствующих центрам пикселей трансформированного изображения, по цифровой модели рельефа.
f
h max = r R max . (6.39)
В случае, если трансформирование снимков выполняется с целью создания или обновления карт и планов значение Rmax выбирается равной величине 0,2 мм на карте или плане. То есть
R max = 0.2 мм · M ,
где М – знаменатель масштаба создаваемой карты.
При создании цифровых трансформированных изображений местности в проекции карты, плановые координаты узлов цифровой модели рельефа определяют в системе координат карты. В России топографические карты создаются в проекции Гаусса - Крюгера в государственных системах координат СК 42, СК 63 и СК 95.
Высоты узлов цифровой модели рельефа задают равными геодезическим высотам H этих узлов относительно поверхности референц – эллипсоида.
По значениям координат узлов x, y в государственной системе координат вычисляют значения геодезической широты В и долготы L узлов цифровой модели рельефа, а затем по величинам B, L и H, координаты узлов Xгц, Yгц и Zгц в геоцентрической системе координат.
Эти преобразования подробно изложены в курсах высшей геодезии и математической картографии.
В остальном, процесс цифрового трансформирования аналогичен процессу создания цифрового ортофотоизображения. Необходимо только отметить, что элементы внешнего ориентирования снимка, в этом случае, должны быть определены в геоцентрической системе координат.
Вместо геоцентрической системы координат можно использовать топоцентрическую систему координат Oтц Xтц Yтц Zтц. Начало топоцентрической системы координат обычно выбирают в середине обрабатываемого участка местности. Ось Xтц топоцентрической системы координат лежит в плоскости меридиана, проходящего через начало системы координат. Ось Zтц совпадает с нормалью к поверхности референц – эллипсоида в начале системы координат, а ось Yтц дополняет систему до правой. При использовании топоцентрической системы координат, элементы внешнего ориентирования исходного снимка должны быть определены в этой системе координат.
9.5. Создание цифровых фотопланов.
Цифровым фотопланом будем называть цифровое трансформированное изображение местности (объекта) созданное по перекрывающимся исходным снимкам.
Цифровые фотопланы могут быть сформированы из трансформированных изображений, созданных по каждому из перекрывающихся снимков, или путём формирования фотоплана непосредственно в результате трансформирования всех перекрывающихся исходных снимков.
На рис. 6.26 представлен принцип формирования цифрового фотоплана по трансформированным изображениям, созданным по каждому из перекрывающихся снимков.
116
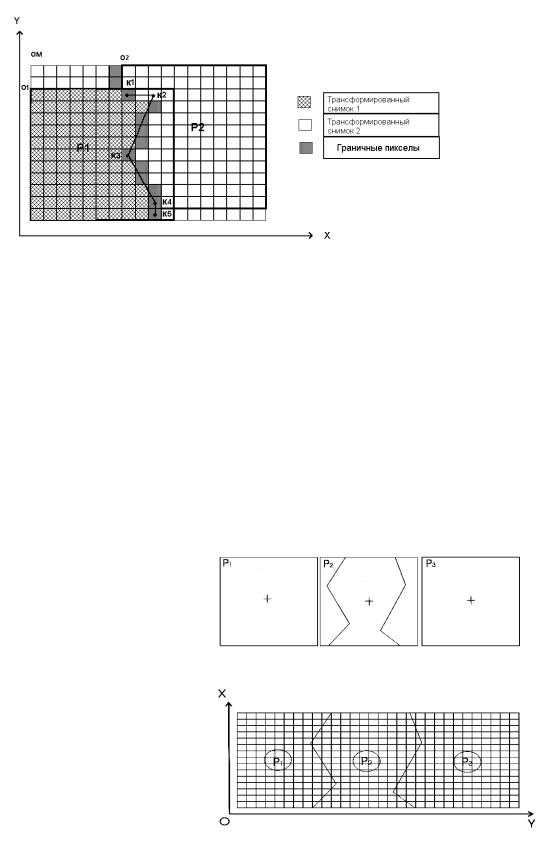
1.1.1.2.Рис. 6.26
Для создания фотоплана используются цифровые трансформированные изображения снимков с одинаковым размером пикселей и имеющие координаты начал систем координат цифровых изображений O1 и O2 кратные размеру пикселя.
При создании цифрового фотоплана в зоне перекрытия трансформированных изображений снимков проводят линию пореза в виде полилинии с узлами Ki.
Затем, в каждой строке определяют граничные пиксели, совмещенные с линией пореза, и приступают к формированию матрицы цифрового фотоплана.
Координата начала системы координат цифрового фотоплана XOM принимается равной наименьшему значению координат XO1 и XO2 начал систем координат цифровых трансформированных изображений снимков, а YOM – наибольшему значению координат
YO1 и YO2 .
Формирование цифрового фотоплана производят следующим образом.
Каждая строка матрицы фотоплана формируется из строки трансформированного изображения снимка P1, включая граничный пиксель и строки изображения снимка P2, начиная с пикселя, следующего за граничным.
Описанным выше методом можно присоединить к созданному фотоплану другие перекрывающиеся изображения снимков.
Цифровые фотопланы могут быть созданы путем формирования матрицы цифрового фотоплана непосредственно по всем перекрывающимся цифровым снимкам.
На рис. 6.27 А,Б иллюстрируется процесс формирования цифрового фотоплана этим методом.
В рассматриваемом методе на перекрывающихся цифровых изображениях
снимков проводят линии пореза, которые представляют собой полилинии. По координатам узлов полилинии в системе координат цифрового снимка определяют координаты проекций узлов полилинии на цифровом фотоплане в системе координат объекта и формируют полилинии на цифровом фотоплане.
117
По этим полилиниям определяют граничные пиксели, которые формируют границы участков цифрового фотоплана, создание которых будет производиться по соответствующим цифровым изображениям снимков.
Формирование цифрового фотоплана в пределах каждого из этих участков производится аналогично процессу формирования цифрового ортофотоснимка.
Определение координат X,Y узлов полилинии в системе координат цифрового фотоплана по значениям координат xc, yc их изображений в системе координат цифрового изображения снимка производится методом приближений следующим образом.
По координатам xc, yc изображения узла вычисляются координаты x, y изображения узла в системе координат снимка.
В случае если при внутреннем ориентировании цифрового снимка использовались аффинные преобразования, эти вычисления производятся по формулам:
x |
a0 |
a1 |
a2 xc |
||||
y |
b |
|
b |
b |
|
y |
. |
|
0 |
|
1 |
|
2 |
|
c |
Затем вычисляются значения координат X, Y узла в системе координат цифрового фотоплана по формулам:
|
|
X XS Z ZS |
X |
|
|
|
|
|
|
|||||
|
|
Z |
, (6.40) |
|
|
|||||||||
|
|
Y Y Z Z |
S |
|
Y |
|
|
|
|
|
||||
|
|
|
|
|
|
|
||||||||
|
|
S |
|
|
|
Z |
|
|
|
|
||||
|
|
в которых |
|
|
|
|
X |
x x0 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
В первом приближении |
Y |
A |
y |
y0 |
||||||||
|
|
значение высоты узла |
|
|
|
|
|
f |
|
|||||
|
|
принимают равной |
|
|
|
Z |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
среднему значению |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
высот точек цифровой модели рельефа Z1. |
|
|||||||||||
|
|
По вычисленным |
|
|
|
значениям |
X1,Y1 |
по |
||||||
|
|
цифровой |
модели |
|
|
|
рельефа |
методом |
||||||
|
|
|
|
|
||||||||||
|
Рис. 6.28 |
билинейной |
интерполяции, |
изложенном |
в |
|||||||||
|
|
разделе 9.4, определяют уточненное значение |
||||||||||||
|
|
|||||||||||||
|
|
высоты узла Z2. по которому по формулам |
||||||||||||
(6.36) определяют уточненное значение координат узла X2,Y2. По координатам X2, Y2 узла, в свою очередь, |
||||||||||||||
определяют новое значение высоты узла Z3.
Вычисление продолжают до тех пор, пока разность значений координат X и Y узла в приближениях не будут превышать установленного допуска.
Процесс определения координат X,Y узлов полилинии методом приближений представлен на рис.
6.28.
9.6. Оценка точности цифровых трансформированных фотоснимков и
фотопланов
Созданные в результате цифрового трансформирования снимков цифровые изображения местности по точности должны соответствовать требованиям, предъявляемым к их точности нормативными документами Роскартографии, если фотопланы предназначены для создания кадастровых и топографических карт (планов) или технического задания на производство работ, если фотопланы создаются для решения других задач.
Контроль созданных трансформированных фотоснимков и фотопланов проводят по расхождениям значений координат контрольных точек, измеренных непосредственно на цифровом плане и координат этих точек, определенных в результате геодезических измерений или в результате построения сети пространственной фототриангуляции.
118
Вкачестве контрольных точек выбираются только точки, расположенные непосредственно на земной поверхности, так как изображения объектов местности возвышающихся над ней (крыши домов, мосты и т.п.) имеют на фотопланах искажения.
Контроль фотопланов производится также по расхождениям одноименных контуров расположенных на линии пореза (граничной линии) смежных трансформированных фотоснимков.
Вслучае если трансформированные фотоснимки и фотопланы создавались для создания топографических и кадастровых карт (планов), расхождения в плане положения контрольных точек не должны превышать величины 0.5 мм в масштабе создаваемой карты (плана), а расхождения одноименных контуров на граничной линии величины 0.7 мм.
При цифровом трансформировании снимков с целью контроля точности определения элементов ориентирования исходных снимков и точности построения цифровой модели рельефа местности, перед выполнением процесса формирования цифровых трансформированных изображений производят априорную оценку их точности.
Априорная оценка точности производится по контрольным точкам, путем сравнения значений их плановых координат, определенных в результате геодезических или фотограмметрических определений и значений координат расчетного положения изображения контрольной точки на трансформированном изображении.
Определение плановых координат расчетного положения изображения контрольной точки производится по значениям координат изображений контрольных точек на исходных снимках, значениям элементов внутреннего и внешнего ориентирования снимков, параметрам внутреннего ориентирования снимка в системе координат цифрового изображения с использованием цифровой модели рельефа. При этом используется алгоритм, аналогичный алгоритму определения координат углов граничной линии на фотоплане.
При определении координат в качестве начального приближения, используется высота контрольной точки, значение которой было определено в результате геодезических или фотограмметрических определений.
Проведение априорной оценки точности позволяет проконтролировать качество фотограмметрических работ, выполняемых для обеспечения процесса цифрового трансформирования и при необходимости повторить эти процессы.
10. Современные цифровые фотограмметрические системы
и их основные характеристики
Применение цифровых методов фотограмметрии в практике топографических, кадастровых и других съемок, как и картографического обеспечения геоинформационных и кадастровых систем, стало реальностью сегодняшнего дня. И нет никаких сомнений в том, что вытеснение классических аналоговых методов обработки материалов аэрофотосъемки
– задача уже ближайшего будущего. Это обстоятельство и послужило основанием для того, чтобы в действующих инструкциях по фотограмметрическим работам были обозначены как основные задачи, решаемые цифровыми методами, так и критерии их эффективности.
Требования к цифровым фотограмметрическим системам (ЦФС) делятся на общие, технические и технологические.
Общие требования к ЦФС включают такие условия, как строгость алгоритма, максимальная автоматизация процессов обработки, гарантированное решение задачи при наличии теоретической возможности, использование всей геометрической точности исходных изображений, насыщенность алгоритмов логическими операциями контроля полноты и корректности данных, авторская поддержка программных средств и др.
Технические требования определяют главные условия функционирования цифровых систем и в частности – возможность обработки черно-белых и цветных снимков в сжатых и несжатых форматах, отсутствие ограничений на объем памяти и быстродействие ПЭВМ, реализация оптических и электронных средств стереоизмерений и ряд других.
119
Технологические требования к цифровым системам определяют перечень функциональных возможностей систем, наличие которых обеспечивает их эффективную эксплуатацию, в частности:
автоматическое распознавание и измерение изображений координатных меток и выполнение внутреннего ориентирования;
автоматическое стереоотождествление и измерение идентичных опорных и фотограмметрических точек перекрывающихся снимков;
автоматическое построение по стереопарам цифровых моделей рельефа;
ортотрансформирование изображений с использованием информации о рельефе, представленной в виде горизонталей, отдельных точек (пикетов), регулярной или нерегулярной ЦМР, формирование выходного ортоизображения с заданным геометрическим разрешением и автоматическое выравнивание его плотности;
внутреннее, взаимное и внешнее ориентирование снимков и моделей (маршрутов) по произвольному числу исходных точек (меток, крестов);
сбор цифровой информации об объектах местности в процессе стерео- и моно векторизации (по эпиполярным снимка м и ортоизображению соответственно) с использованием настраиваемого классификатора, ее редактирование с использованием автоматизированных процедур и представление результатов в распространенных форматах.
Внастоящее время имеется достаточно большое число цифровых фотограмметрических систем, из которых наибольшее распространение в специализированных предприятиях Республики Беларусь получили системы Photomod , ТАЛКА, и RealisticMap.
ЦФС Photomod разработана ОАО «Ракурс» в содружестве с ведущими специалистами России. Система создана в 1993 г. и ныне используется более чем в 40 странах мира.
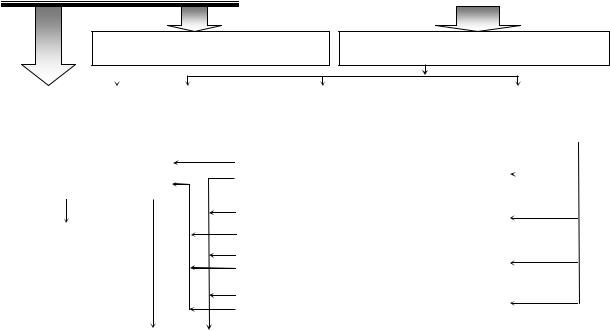
Рис. 6.29 Взаимодействие программных компонентов ЦФС Photomod Photomod – полнофункциональная система с богатейшими возможностями и ориги-
нальным графическим интерфейсом. Используемые системой математические модели позволяют обрабатывать не только наземные и воздушные снимки, полученные по законам центрального проектирования, но и сканерные, радиолокационные изображения, а также снимки, полученные неметрическими камерами. Это одна из немногих фотограмметрических систем на рынке СНГ, позволяющая обрабатывать космические и иные цифровые сканерные изображения, полученные с помощью различных сенсоров.
К достоинствам системы относится замкнутый технологический цикл получения всех видов конечной продукции: ЦМР, 3D-векторов, ортофотопланов и цифровых карт без использования других программных продуктов.
ЦФС Photomod имеет гибкую модульную структуру, обеспечивающую оптимальное соответствие конфигурации задачам пользователя, функционирует в локальной сети и может эксплуатироваться совместно с другими фотограмметрическими системами. Структура системы и основные функции ее компонентов показаны на рис. 6. 29.
120
Широкое распространение и профессиональное признание системы обеспечили ее богатейшие технологические возможности, основные из которых сводятся к следующему:
оригинальная графическая среда и доступный интерфейс;
возможность обработки сканерных спутниковых изображений, включая снимки
SPOT, TERRA, EROS, LANDSAT, IRS, ASTER, ICONOS, QuickBird;
наличие интерфейса, обеспечивающего эксплуатацию системы в среде ГИС «Карта
2000» (ГИС «Панорама»), MicroStation/95/SE/J (модуль StereoLink), экспорта данных в геоинформационные и картографические системы и др.;
возможность использования при построении и уравнивании фотограмметрических измерений полного набора систем координат, картографических проекций и данных GPS-измерений;
Цифровые изображения
Расчет искажений и их учет
(Photomod ScanCorrect)
Управление проектом
(Photomod Project Manager)
|
Внутреннее ориентирование, выбор |
|
|
Уравнивание |
|
|
Управление обработкой |
||||||
|
точек, построение маршрутной сети |
|
|
фототриангуляционного блока |
|
|
(монтажный стол) |
||||||
|
(Photomod AT) |
|
|
объединением моделей |
|
|
(Photomod Montage Desktop) |
||||||
|
|
|
|
|
|
(Photomod Solver) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Векторизация |
|
|
Стереовекторизация контуров |
|
|
|
|
|||||
|
ортоизображений, вывод |
|
|
|
(Photomod StereoDraw) |
|
|
|
|||||
|
(Photomod VectOr) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
Построение цифровой модели |
|
|
|||||
|
|
|
|
|
|
рельефа и горизонталей |
|
|
|||||
|
Печать |
|
|
|
|
(Photomod DTM) |
|
|
|
|
|
||
|
ортофотопланов, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
цифровых карт |
|
|
|
Построение ортоизображения |
|
|
|
|||||
|
|
|
|
|
|
(Photomod Mosaic) |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
Обработка одиночных снимков |
|
|
|
||||
|
|
|
|
|
|
(Photomod FastOrtho) |
|
|
|||||
|
|
|
|
|
|
|
|
||||||
|
|
ГИС, CAD, картографические и иные системы |
|
|
|
|
|
||||||
наличие эффективных средств калибровки планшетных полиграфических сканеров;
наличие настраиваемого классификатора картографических объектов;
применение графических и статистических методов оценки достоверности данных и диагностики ошибок измерений;
возможность формирования ЦМР на регулярной сетке (DEM) с переменным разрешением и использования ее при ортотрансформировании;
наличие эффективных средств оцифровки в монокулярном и стереоскопическом режимах и редактирования полученной графической (векторной) информации;
Система постоянно совершенствуется (в год появляется 2–3 новых версии), пополняется новыми инструментальными средствами и технологическими возможностями.
ЦФС ТАЛКА разработана ИПУ РАН под руководством доктора физикоматематических наук Д. В. Тюкавкина. Она отвечает производственным требованиям, технологична и изначально хорошо приспособлена для работы с большими объемами данных. К особенности системы можно отнести:
использование «сжатых» изображений, состоящих из точных фрагментов («фотоабрисов») с изображениями точек и пространств между ними с 10-кратным прореживанием;
возможность обработки больших изображений объемом до 4 Гб;
121