

2385
.pdf4. Источники цифровых изображений
Цифровые изображения получают двумя способами, один из которых предполагает сканирование аналоговых фотоснимков (аэронегативов), полученных в процессе аэрофотосъемки, а второй – использование цифровых съемочных систем (сенсоров) непосредственно в процессе съемки. В обоих случаях цифровое изображение формируется с помощью либо фотодиодов, либо приемников с зарядовой связью (ПЗС) в форме ПЗС-
матрицы или ПЗС-линейки с примерно одинаковыми техническими возможностями. Применение ПЗС-матрицы предполагает формирование всего кадра изображения по схеме, аналогичной фотокамере, где в фокальной плоскости вместо фотопленки располагается ПЗС-матрица. Применение ПЗС-линейки предполагает сканирование местности или изображения параллельными маршрутами с шагом, равным размеру элемента геометрического разрешения.
Сканирование фотоснимков выполняется с помощью оптико-электронных приборов – сканеров, которые по принципу исполнения можно разделить на роликовые, планшетные и барабанные, а по точности и назначению – на офисные и фотограмметрические.
Роликовые сканеры имеют малый формат, неподвижную считывающую головку и низкую точность. Планшетные сканеры – более точные, но низкоскоростные; столбцы и строки изображения задаются перемещениями источника света и считывающей головки. Барабанные сканеры не без оснований считаются наиболее точными; строки формируемого изображения задаются вращением барабана, а столбцы – перемещением считывающей головки.
Офисные сканеры характеризуются относительно низким геометрическим разрешением (от 10 мкм с использованием фотодиодов до 100 мкм на основе ПЗС-линеек), существенными геометрическими ошибками положения элементов растра и используются для сканирования фотоснимков только в исключительных случаях.
Фотограмметрические сканеры характеризуются высоким геометрическим разрешением (не менее 10 мкм при использовании ПЗС-матриц и ПЗС-линеек) и высокой геометрической точностью, определяемой величиной ошибки сканирования и повторяемостью (изменением ошибки в десяти сканированиях). С их помощью можно сканировать черно-белые (штриховые) или цветные снимки. Технические характеристики некоторых наиболее распространенных фотограмметрических сканеров приведены в табл. 6.2; наличие 24-х уровней квантования обеспечивает получение цветного изображения (3 канала по 8 бит).
|
|
|
|
Таблица 6.2 |
Наименование |
|
Характеристика |
|
|
Характеристики |
|
фотограмметрического сканера |
|
|
|
ОАО |
«Дельта», |
СКФ-11. |
DSW500 |
|
«Пеленг», РБ |
Украина |
Россия |
LH System |
Размер снимка, мм |
300 400 |
300 450 |
300 300 |
260 260 |
Размер пиксела, мкм |
5 |
8 – 128 |
8 |
9 |
Ошибка сканирования, мкм |
2 |
3 |
3 |
2 |
Число уровней квантования, бит |
3 8 =24 |
3 8 =24 |
3 8 =24 |
1 10 |
Некоторые фотограмметрические сканеры (например, «Дельта» и др.) предусматривают возможность сканирования аэронегативов с неразрезанного аэрофильма, как это практикуется в фотограмметрическом производстве.
Затраты времени на сканирование характеризуются следующими данными для сканера «Дельта» (рис. 6.6): черно-белый снимок формата 23 23 см с геометрическим разрешением 8 мкм сканируется за 12 минут, а с геометрическим разрешением 30 мкм – за 4 минуты. Для получения цветного растрового изображения того же формата и с той же
92
Рис. 6.6. Фотограмметрический
сканер «Дельта» (Украина)
геометрической точностью требуется 30 и 9 минут соответственно.
Важнейшим элементом формирования цифрового изображения является эталонирование сканера, особенно в случае, если он не является фотограмметрическим. Сущность эталонирования заключается в сканировании контрольной сетки с нанесенными на нее горизонтальными и вертикальными штрихами, расстояния между которыми известны с точностью 1–2 мкм. На полученном изображении измеряют «пиксельные» координаты xP, yP крестов контрольной сетки в системе oPxPyP (рис. 6.2), преобразуют их в линейную меру с учетом заданного геометрического разрешения и сравнивают полученные значения с точными координатами, отсчитанными по контрольной сетке. По найденным разностям координат соответствующих точек строят поле искажений, характеризующее все виды геометрическихискажений, вносимыхсканером в той или инойточке поля сканирования.
Впоследующем изображения, полученные с помощью этого сканера, могут быть исправлены в соответствии с параметрами поля искажений. Имеющиеся публикации свидетельствуют, что искажения фотограмметрического сканера можно уменьшить до 1 мкм.
Цифровые съемочные системы (сенсоры) появились только на рубеже веков.
Кэтому времени было достигнуто сопоставимое с фотоснимками геометрическое разрешение (5–6 мкм), появились средства хранения громадных объемов информации (порядка 1 Гб на каждый снимок), создана аппаратура стабилизации съемочной камеры в полете и высокоточного определения координат центров фотографирования.
Внастоящее время успешно эксплуатируются несколько цифровых камер, в частно-
сти: ADS40 (фирма LH-System, Швейцария), DMC2001 (фирма Z/I Imaging (США, Герма-
ния), |
HRSC |
|
|
|
|
Таблица 6.3 |
|||
(центр |
косми- |
|
|
|
|
||||
Наименование |
|
Характеристика камеры |
|
||||||
ческих |
ис- |
|
|
||||||
характеристики |
ADS40 |
DMC |
HRSC |
ЦТК-140 |
ЦТК-70 |
||||
следований |
|||||||||
Фокусное расстояние, мм |
62,5 |
120 |
47 - 175 |
140 |
70 |
||||
Германии DLR) |
|||||||||
Размер пиксела, мкм |
6,5 |
6 |
6 7 |
7 |
7 |
||||
и |
др., |
Число спектральных каналов |
6 |
12 |
5 |
1 |
4 |
||
обеспечивающи |
Радиометрическое разрешение, бит |
8 |
8 |
8 12 |
8 |
10/8 |
|||
е возможность |
Светочувствительный ПЗС-элемент |
линейка |
матрица |
линейка |
линейка |
линейка |
|||
получения |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|||
изображений как в видимой части спектра, так и в инфракрасном диапазоне. Имеются данные о Российских цифровых съемочных комплексах ЦТК-140 и ЦТК-70. Некоторые характеристики этих камер приведены в табл. 6.3.
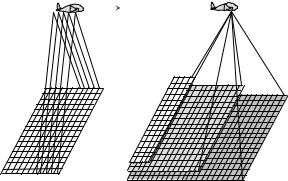
С точки зрения фотограмметрической обработки цифровых изображений, получаемых с помощью цифровых съемочных систем на ПЗС-линейках, чрезвычайно важны два обстоятельства:
1. Изображения формируются в результате сканирования местности в направлении, перпендикулярном направлению полета. Поэтому результатом съемки являются не кадровые снимки, а полосы изображений, так что стереоскопические наблюдения и
измерения возможны только по полосе перекрытия со смежным маршрутом (рис. 6.7, a). |
|
|||
|
|
2. Геометрия сканерных снимков не |
||
|
|
соответствует центральной проекции, поскольку |
||
|
|
каждая их строка формируется из собственного |
||
|
|
центра. Фотограмметрической обработке таких |
||
|
|
изображений предшествует преобразование их в |
||
|
|
форму, соответствующую законам построения |
||
|
|
изображений при центральном проектировании. |
||
|
|
Отсутствие продольных перекрытий сканерных |
||
|
|
снимков и невозможность создания по ним |
||
|
|
стереопар существенно снижают |
точность |
их |
а |
б |
фотограмметрической обработки, |
поэтому |
со- |
Рис. 6.7. Сканирование местности с записью |
|
|
|
|
результатов на одну (а) и три (б) ПЗС-линейки |
|
|
93 |
|
временные съемочные системы предусматривают одновременное применение нескольких ПЗС-линеек, каждая из которыхформирует изображение по определенномунаправлению (рис. 6.7, б).
Так, цифровая система ASD40 имеет в фокальной плоскости три ПЗС-линейки, одна из которых обеспечивает съемку полосы по направлению «вперед», вторая – полосы в направлении точки надира («вниз»), а третья – полосы «назад». Совместная обработка трех полос изображений позволяет получить продольные перекрытия и выполнить стереоскопические наблюдения.
Цифровая съемочная система HRSC (High Resolution Stereo Camera) с помощью девяти линеек ПЗС в фокальной плоскости объектива выполняет съемку одновременно девяти перекрывающихся полос, пять из которых используется для стереообработки, а остальные четыре обеспечивают получение изображения в том или ином оптическом диапазоне.
5. Стереоскопические наблюдения и измерения цифровых
изображений
Стереоскопические наблюдения двух изображений возможны при выполнении условий, полностью соответствующих сформулированным в Главе 6 и касающихся съемки с двух различных точек пространства, разномасштабности изображений, величины угла конвергенции главных оптических осей и тому подобное. Одним из основных условий получения стереоэффекта является требование наблюдения каждого снимка только одним глазом.
Как и в случае наблюдения аналоговых снимков, основными способами получения стереоскопического эффекта являются анаглифический, затворный, оптический и др., получившие в компьютерном исполнении новые возможности. Их реализация учитывает ряд особенностей работы с цифровыми изображениями, в частности: простота геометрических и фотометрических преобразований, формирование изображения на экране монитора с покадровым (page-flipping) или построчным (interlace) режимом выводом, наличие видеопамяти и др.
Анаглифический способ стереоскопических наблюдений не предполагает наличия какого-либо специального оборудования в виде плат или адаптеров, и требует наличия
лишь анаглифических очков. Наблюдаемая |
при этом стереоскопическая |
модель |
||
|
формируется по правилам, изложенным ранее для случая |
|||
|
наблюдения аналоговых снимков. |
|
||
|
Перекрывающиеся части левого и правого изображений, |
|||
|
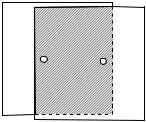
образующие зону стереоскопических наблюдений (рис. 6.8), |
|||
|
окрашиваются в дополнительные цвета и выводятся на экран либо |
|||
|
по строкам (четные – левого снимка, а нечетные – правого), либо |
|||
|
путем наложения левого на правое. Полученное на экране |
|||
Рис.6. 8. Зона |
монитора совмещенное |
изображение рассматривается |
через |
|
анаглифические очки, стекла которых окрашены в те же цвета, |
||||
стереонаблюдений пары |
||||
снимков |
что и соответствующие им изображения снимков. В результате |
|||
наблюдатель видит пространственную модель местности, механизм возникновения которой был рассмотрен ранее применительно к получению стереомодели по аналоговым снимкам. В первом случае наблюдатель видит «разреженное» изображение, что снижает точность стереоскопических измерений, а во втором – цвет и оптическая плотность каждого пикселя суммарного изображения (элемента монитора), формируемые в зависимости от цвета и плотности накладывающихся пикселей изображений, что неизбежно ведет к некоторым потерям четкости. Однако в обоих случаях каждый глаз
94

наблюдателя видит только одно изображение, что и вызывает возникновение стереоскопической модели местности.
Затворный способ получения стереоскопического эффекта основан на специфике представления изображения на экране монитора и предполагает применение специальных
затворных (жидкокристаллических) очков с LCD-затворами (Liquid Crystal Display)
различных типов (ИБИК, NuVision, и др.), в которых стекла становятся прозрачными поочередно, в соответствии со сменой видеостраниц на экране монитора. Сущность способа заключается в следующем.
Изображения левого и правого снимков формируются на страницах видеопамяти и поочередно выводятся на экран монитора. Наблюдения выполняются через очки, представляющие собой пару плоскопараллельных пластин с заключенным между ними слоем жидкого кристалла, который при воздействии на него электрического импульса может изменять интенсивность проходящего через него света так, что в каждый момент времени наблюдатель воспринимает изображение на экране монитора только одним глазом, левым или правым. Поскольку смена страниц видеопамяти на экране монитора синхронизирована с изменением прозрачности пластин затворных очков при помощи специального канала связи, то наблюдатель видит либо прямой стереоэффект, либо обратный. Для смены прямого стереоэффекта на обратный и наоборот нужно изменить фазу, управляющую последовательностью вывода страниц видеопамяти.
Покадровый (page-flipping) режим стереонаблюдений предполагает поочередный вывод на экран левого и правого изображений синхронно со сменой прозрачности пластин затворных очков, установленных перед левым и правым глазом. Вывод полных изображений обеспечивает получение более высокого качества стереоизображения, но требует в целях обеспечения комфортности наблюдений для глаз достаточно высокой вертикальной частоты монитора (не менее 120 герц).
Построчный (interlace) режим стереонаблюдений предполагает деление кадра на два полукадра с чётными и нечетными строками соответственно. Правое и левое изображения стереопары выводятся на экран поочередно в «чётном» и «нечётном» полукадре, а синхронизируемые с вертикальной разверткой монитора затворные очки позволяют наблюдать два изображения «одновременно» и таким образом проводить стереоизмерения. Необходимым условием комфортной для глаз работы в этом режиме является достаточно высокая вертикальная частота монитора (как минимум 75 герц на «каждый глаз» – то есть примерно 150 герц при переключении в интерлейс).
Построчный режим применим только к |
|
|
экрану в целом, что приводит к некоторым |
|
|
неудобствам, например, при работе с меню. |
|
|
Другим недостатком является прореживание |
|
|
картинки и, как следствие, снижение разрешения |
|
|
в связи с использованием полукадров. |
|
|
Оптический способ стереоскопических |
|
|
наблюдений |
предполагает вывод зоны стереонаб- |
|
людений левого и правого снимков (рис. 6.9) со- |
|
|
ответственно в левую и правую части экрана. Оба |
|
|
изображения окрашены в естественные цвета, по- |
|
|
этому для их рассматривания и получения стерео- |
|
|
скопического эффекта нужно выполнить искусст- |
|
|
Рис. 6.9. Стереоприставка для |
||
венное разделение соответственных лучей, что |
наблюдения стереомодели |
|
достигается |
применением специальной сте- |
|
реоприставки, устанавливаемой перед монитором. Это обеспечивает возможность наблюдения стереоскопической модели местности и ее измерения, минуя неизбежные потери света при использовании некоторых других способов и приспособлений.
95

Имеются и другие способы получения стереоскопического эффекта по паре цифровых изображений, например, поляроидный, адаптированный к компьютерному построению модели и др.
Измерение построенной рассмотренными выше способами стереоскопической модели выполняют, как и в случае использования аналоговых изображений, монокулярным и стереоскопическим способами.
Монокулярный способ измерений используют при нанесении на снимки опорных точек, внутреннем ориентировании снимков и др. Применительно к обработке цифрового изображения монокулярные измерения сводятся к опознаванию нужной точки путем наведения на нее маркера, заменяющего измерительную марку стереокомпаратора. Считывание координат точки в системе растрового изображения oPxPyP (рис. 6.2) и преобразование их в ту или иную систему выполняется в автоматическом режиме.
Стереоскопические измерения выполняют способом мнимой марки, в качестве которой используют курсор, причем, оператор может выбрать любой из доступной палитры цвет его изображения, размер и форму (точка, крест, прицел, косой крест и пр.). С помощью специальных технологических приемов точность стереоскопических измерений может быть повышена до ⅓ ¼ от величины геометрического разрешения цифровых снимков.
6. Автоматическая идентификация точек цифровых снимков
(коррелятор)
Первые исследования в области автоматизации стереоскопических измерений были выполнены в МИИГАиК профессором А. С. Скиридовым в 1924–1932 гг. Полагая изображения достаточно малых участков снимков стереопары подобными, он предложил преобразовывать эти участки в электрические сигналы и, анализируя их, отождествлять (идентифицировать) соответственные точки. В то время это не получило развития из-за отсутствия технических средств, и в 1960 г. А. С. Скиридов возобновил свои исследования, приступив вместе с Г. Д. Федоруком к созданию изогипсографа – прибора для автоматической рисовки горизонталей.
Первый автоматизированный прибор, доказавший принципиальную возможность решения этой задачи, был разработан в 1950-х гг. по предложению Гаррисона фирмой Бауш и Ломб совместно с Научно-исследовательским топографическим отделом инженерных войск США. В последующем эти идеи были воплощены в целой серии фотограмметрических приборов – Стереомате (США), Аналитическом стереоприборе ОМИ-НИСТРИ (Канада), Аналитическом фотокартографе (СССР) и др.
Новый импульс получили идеи автоматизации с появлением ПЭВМ, дешевой электронной памяти, высокоточных сканеров и развитием теории машинного зрения. Применение этих и ряда других достижений науки и техники открыло путь к автоматизации широкого круга фотограмметрических задач, основанных на автоматической идентификации точек на перекрывающихся снимках.
Образ R 


Левый снимок



 Образ R
Образ R
Зона
поиска
Правый снимок
В настоящее время идентификация точек на паре снимков рассматривается как статистическая задача распознавания изображений при наличии помех и искажений и решается на основе динамической теории зрения с использованием оптикоэлектронных или программных
Рис. 6.10. К автоматической идентификации точек |
96 |
|

блоков, называемых корреляторами. В ее основе лежит понятие образа – произвольной по форме и размерам области снимка вместе со всей имеющейся информацией. С математической точки зрения образ представляет собой многомерный вектор R как совокупность элементов изображения (пикселов), каждый из которых характеризуется своим положением и оптической плотностью ij согласно (6.6).
Опознавание точки левого снимка на правом сводится к определению некоторого образа R на левом снимке и поиску на правом снимке такого образа R , чтобы расстояние между ними было минимальным:
R – R =min. |
(6.7) |
Практически для автоматического опознавания точки необходимо:
1.Выбрать на левом снимке образ R в виде области размером n n пикселов, в центре которой размещена опознаваемая точка (рис. 6.10), и определить его характеристики, на основе которых будет выполняться проверка условия (6.7).
2.Определить зону поиска размером m m пикселов (m n) вероятного расположения
искомойточки на правом снимке (рис. 6.10)с координатами центра xп xл bсн, yп yл.
3.Последовательным перемещением области размером n n пикселов в границах зоны поиска размером m m создать на правом снимке серию образов R и определить характеристики каждого из них с целью проверки условия (6.7).
4.Сопоставить характеристики каждого образа R с характеристикой-эталоном вектора R. Искомая точка на правом снимке будет расположена в центре образа R , для которого выполняется условие (6.7).
Установление степени соответствия векторов R и R представляет основную трудность и может быть выполнено различными путями. Например, один из них основан на расчете для образа-эталона R и каждого образа R правого снимка ковариационной матрицы
c |
c |
c |
|
|
11 |
12 |
13 |
|
(6.8) |
C c21 |
c22 |
c23 |
, |
|
c |
c |
c |
|
|
31 |
32 |
33 |
|
|
где
c11 k (xi x0 )2, c22 k (yi y0 )2 ,
c33 k ( i 0 )2,
c12 |
c21 k (xi |
x0)(yi |
y0 ), |
x0 |
xi |
/N |
|
c13 |
c31 k (xi |
x0 )( i |
0), |
y0 |
yi |
|
|
/N |
, |
||||||
c23 c32 k (yi |
y0)( i |
0 ), |
0 |
i |
|
||
/N |
|
||||||
k 1/(N 1), |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
N – число элементов в образах R и R ; xi, yi, i – координаты элементов образа и их оптические плотности.
Если C0 – ковариационная матрица (6.8) образа R на левом снимке, то условие (6.7) будет выполненным для вектора R , для которого разность матриц V=C0–Ci минимальна.
Более широко применяется метод идентификации точек снимков, основанный на расчете коэффициентов корреляции между оптическими плотностями элементов образа R и каждого из образов R на правом снимке с использованием формулы:
|
|
|
( i |
0 )( i 0 ) |
|
|||||
r |
|
|
||||||||
|
|
|
|
|
|
|
, |
(6.9) |
||
|
|
|
|
|
|
|
||||
|
|
|
( i |
0 )2 ( i 0 )2 |
|
|||||
97
где 0 и 0 – средние оптические плотности элементов зон (фрагментов), соответствующих образам левого (R) и правого (R ) снимков.
Коэффициенты, подсчитанные для сочетаний образа R со всеми образами R , образуют корреляционную матрицу: максимальное значение ее элемента соответствует наиболее тесной связи оптических плотностей сравниваемых участков левого и правого снимков, и, следовательно, выполнению условия (6.7). Так что искомая точка лежит в центре образа R с максимальным коэффициентом корреляции.
Некоторые способы предполагают отыскание искомой точки по максимуму корреляционной функции, составленной на основе анализа элементов корреляционной матрицы с частными коэффициентами корреляции (6.9), соответствующей искомому образу R .
Размер области снимка, отождествляемой с образом R, обычно составляет 20 20 пикселов; при малом числе контуров местности он увеличивается до 40 40 пикселов. Программы обработки обычно запрашивают полуразмер корреляционной матрицы (образа
R).
Размер области поиска на правом снимке выбирается таким, чтобы он был в два раза больше ожидаемого смещения точки из-за влияния рельефа местности. Так, при высоте фотографирования H=2000 м, максимальном превышении рельефа над средней плоскостью h=50 м и расстоянии от центра снимка до угла рабочей площади r=100 мм (формат кадра 23 23 см) будем иметь h=2,5 мм, а размер области поиска – 5 5 мм.
Рассмотренные варианты установления степени соответствия образов R и R далеко не единственные: в специальной литературе имеются упоминания о методе иерархической релаксации (методе пирамид HRC), методе вертикальной линии (ULL), методе динамического программирования и тому подобное. Некоторые из них основаны на анализе тех или иных признаков, характеризующих выделенные по группе пикселов элементы – их форму, взаимное расположение, ориентировку и другие. Однако все методы идентификации точек объединяют два обстоятельства:
отождествление выполняется на основе более или менее строгого анализа элементов изображений – их оптических плотностей и геометрического положения;
корреляторов, обеспечивающих 100-процентную гарантию качества автоматической идентификации точек, не существует.
Эти |
обстоятельства |
предопределяют |
|
|
|
|
|
|
|
|
|
|
целесообразность стереоскопического контроля поло- |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|||
жения измерительной марки после работы коррелятора. В |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|||
большинстве случаев опытный наблюдатель ее обяза- |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|||
тельно чуть-чуть подправит по высоте. |
|
|
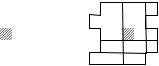
Рис. 6.11. Геометрическое |
|||||||||
Искажения |
точек, вызванные |
влиянием угла |
|
|||||||||
наклона снимка |
и рельефа местности, вызывают |
положениеэлементов образа R на |
||||||||||
правом снимкеискажается
смещения отдельных элементов растра, и это не может не сказываться на качестве идентификации.
Так, если на левом снимке образ R всегда представлен квадратом, то на правом снимке (рис. 6.11)из-за влияния угла наклона и рельефа местности соответствующие элементы образа R получают смещения, и в общем случае образуют многоугольник. Поскольку анализируемый образ R геометрически не всегда подобен образуR, то вероятность полного совпадения искомой точки уменьшается. Еще более сложная ситуация возникает в случае, если изображения левого и правого снимков развернуты одно относительно другого.
98

Однако из-за малости элементов изображения эти искажения не столь значительны, а их влияние можно компенсировать геометрической коррекцией положения пика корреляции и соответствующей ему точки правого снимка. Одно из таких решений основано на том, что смещения элементов образа являются следствием неровностей рельефа в пределах соответствующего участка местности и интерпретируются как параллактические смещения.
7. Фотограмметрическая обработка
цифровых снимков
Основная задача фотограмметрии – определение формы, размеров и пространственного положения объектов местности – при использовании цифровых изображений решается путем определения координат этих объектов или их элементов с применением рассмотренных ранее аналитических способов. Важнейшей их особенностью является объединение вычислительной обработки (внутреннее, взаимное, внешнее ориентирование и т. п.) со сбором нужной для этого информации – измерением координат необходимых точек и автоматической их идентификацией на смежных снимках. Это обстоятельство в сочетании с максимальной автоматизацией технологических процессов делают цифровую фотограмметрическую обработку высокоэффективной и технологичной, не требующей высокой квалификации исполнителей.
Ниже рассмотрены некоторые элементы вычислительной обработки цифровых снимков, аналогичные процессам аналитической обработки данных в Главе 5.
1. Внутреннее ориентирование снимков
Внутреннее ориентирование цифровых изображений (снимков) выполняется с целью установления соответствия между координатными системами растра oPxPyP и снимка oxy
(рис. 12). |
|
|||
|
|
Математическая модель внутреннего ориентирования цифрового изображения |
||
аналогична применяемой |
при аналитическом построении сетей фототриангуляции и |
|||
op |
y |
предполагает определение параметров ортогонального, аф- |
||
|
xp |
финного или проективного преобразования по избыточному |
||
|
||||
|
|
|
||
|
|
|
||
|
|
|
|
числу измерений, методом наименьших квадратов. Так, |
|
|
|
|
|
|
|
|
x |
наиболее часто применяемые аффинные преобразования |
|
|
|
||
oоснованы на использовании следующих формул связи исходных (xPyP) и преобразованных (x,y) координат:
yp |
|
|
|
|
x |
|
|
a |
|
|
a a |
|
|
xp |
|
a |
|
|
xp |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
y |
|
|
|
0 |
|
1 |
|
2 |
|
yp |
|
|
0 |
P |
yp |
, |
(6.10) |
Рис. 6.12. Координатные |
|
|
|
b0 |
|
b1 |
b2 |
|
|
b0 |
|
|
|
|||||||||
системы снимка (oxy) и |
где ai и bi |
(i=0,1,2) – коэффициенты |
|
аффинного |
||||||||||||||||||
|
|
растра (opxpyp) |
|
|||||||||||||||||||
|
|
|
|
преобразования, определяемые из решения системы уравнений |
||||||||||||||||||
поправок, составленных по результатам измерения координат оптических меток снимка. Линейные координаты xP ,yP точек снимка в системе oPxPyP связаны с
геометрическим разрешением растра ( ) и номерами столбцов (iX) и строк (iY) простыми зависимостями:
x |
p |
i |
X |
, |
|
i |
X |
x |
p |
/ , |
|
||
|
|
|
|
и |
|
|
|
|
(6.11) |
||||
y |
|
i |
|
|
|
i |
|
y |
|
/ |
|
||
p |
Y |
|
|
Y |
p |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
||||
Для обратного преобразования координат точек из системы oxy в систему растра oPxPyP используются формулы
99
xp |
|
A |
A |
|
|
x a |
|
P 1 |
x a |
|
, |
(6.12) |
yp |
1 |
|
2 |
|
0 |
|
0 |
|||||
|
B1 |
B2 |
|
y b0 |
|
y b0 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
где P и P-1 – прямая и обратная матрицы аффинного преобразования. Последовательность внутреннего ориентирования в современных цифровых
фотограмметрических системах сводится к следующему.
Оператор выполняет идентификацию первых двух координатных меток (крестов), для чего наводит на них измерительную марку и выполняет регистрацию координат в системе oPxPyP. После этого программа выполняет расчет положения последующих координатных меток (крестов) и подводит к ним измерительную марку, а оператор выполняет необходимые уточнения и регистрацию координат точки. По завершению измерений всех меток программа запрашивает метод преобразований, выполняет расчет параметров и выводит расхождения между эталонными и вычисленными координатами меток (крестов). В случае несоответствия полученных расхождений требуемым нормативными документами (8–10 мкм) оператор может повторитьвсе выполненные измерений или ихчасть.
Внутреннее ориентирование остальных снимков выполняется в автоматическом режиме, для чего оператор определяет прямоугольную область метки, область ее поиска, допустимый коэффициент корреляции и величину расхождения эталонных и вычисленных координат.
Снимки, для которых автоматическое внутреннее ориентирование завершилось неудовлетворительно, обрабатываются оператором вручную.
2. Выбор точек и построение фотограмметрических моделей
Последующая фотограмметрическая обработка снимков включает:
перенос на изображения опорных точек с известными координатами X, Y, Z в системе местности;
ввод элементов внешнего ориентирования снимков XS, YS, ZS, , , (при их наличии);
выбор связующих точек в зоне поперечного перекрытия, необходимых для связи смежных маршрутов;
выбор связующих точек в зоне тройного продольного перекрытия, используемых для связи смежных моделей маршрута;
выбор точек для подписи на карте высот, урезов вод и др., в соответствии с требованиями действующих нормативных документов;
выбор дополнительных точек в шести стандартных зонах для повышения точности взаимного ориентирования и соединения смежных моделей.
Все точки, положение которых не может быть произвольным (опорные, связующие, урезы вод и др.), наносят только на один снимок; перенос их на другие снимки того же или смежного маршрута выполняют либо в стереорежиме, либо с помощью коррелятора.
Точки, положение которых на снимке не является жестким (например, дополнительные точки в стандартных зонах для определения элементов взаимного ориентирования, или в зонах тройного продольного перекрытия для связи смежных моделей) могут быть нанесены на снимки автоматически, по заданному размеру стандартной зоны и число точек в ней.
Настройка параметров коррелятора является одним из важных элементом фотограмметрической обработки. При этом определяют размер корреляционной матрицы (образа), возможность его автоматической подстройки при малом числе контуров, а также геометрической коррекции положения искомой точки в случае рельефной местности. Контроль работы коррелятора в стереорежиме является обязательным элементом
100
фотограмметрической обработки любых снимков, поскольку качество отождествления точек определяет качество выполнения всех последующих операций.
Номера столбцов (iX) и строк (iY) пикселов растра с намеченными точками преобразуются в линейные координаты в системе oPxPyP, а затем – по формулам 10 и параметрам аффинного преобразования – в систему координат плоскости прикладной рамки аэрокамеры oxy (рис. 6.12) и исправляются поправками, учитывающими влияние:
кривизны Земли и атмосферной рефракции;
дисторсии объектива съемочной камеры путем интерполяции соответствующих величин по точкам ее определения или применением соответствующего полинома;
искажений сканера интерполяцией поправок по данным поля его искажений или по полиномам;
После выбора точек выполняют взаимное ориентирование снимков строгим способом, с применением метода наименьших квадратов. Критерием качества отождествления точек на смежных снимках является среднее квадратическое значение остаточного поперечного параллакса, величина которого не может превышать 10 мкм. Более значительные расхождения свидетельствуют о наличии ошибок, прежде всего, в отождествлении точек. Их устранение требует проверки качества отождествления и измерения точек в стереорежиме. Менее вероятны ошибки внутреннего ориентирования изображений и паспортных данных съемочной камеры (фокусного расстояния, координат главной точки и др.).
Для повышения точности взаимного ориентирования и надежности определения неизвестных в каждой стандартной зоне намечают по две – четыре точки (желательно контурных, надежность измерения которых несколько выше); часть таких точек должна располагаться в зонах тройного продольного и поперечного перекрытий. Важным условием достижения оптимальной точности взаимного ориентирования является одинаковое число точек в стандартных зонах.
Перечисленные операции завершаются построением одиночной модели и подориен-
тированием ее к предыдущей или к последующей. Полученные при этом разности координат связующих точек смежных моделей маршрута позволяют судить о качестве их измерения и отождествления. Величины таких расхождений не должны превышать 15 мкм в плане и 15(f/b) мкм по высоте.
3. Построение и уравнивание фототриангуляционной сети
Построение фототриангуляционной сети в пределах маршрута или блока выполняется в автоматическом режиме с использованием рассмотренных ранее методов. Задача оператора на этом этапе фотограмметрической обработки сводится к выбору методы уравнивания (независимые или полузависимые модели, уравнивание маршрутов, подблоков, связок проектирующих лучей и т. п.), а также определению критериев для подготавливаемого программой отчета. Критерием качества построения и уравнивания фотограмметрической сети служат величины расхождений исходных и найденных по результатам уравнивания координат, которые не должны превышать:
для опорных точек, по которым выполнено внешнее ориентирование – 0,2 мм в масштабе создаваемого плана в плановом положении и 0,15 сечения рельефа по высоте;
для контрольных опорных точек – не более 0,3 мм в масштабе создаваемого плана и 0,1–0,25 м по высоте при сечении рельефа 0,5–1,0 м;
связующих точек смежных маршрутов – не более 0,5 мм в масштабе создаваемого плана (карты).
Надежность уравнивания фотограмметрического блока повышается, если число использованных опорных точек в полтора – два раза превышает минимально необходимое.
101