

2004
.pdfq, z |
|
q0 = 200 см3/с |
1 |
zк = 10 см |
|
|
2 |
0 |
t |
|
|
0 |
tк = 80 с |
Рис. 5. Параметры: 1— входной q(t); 2 — выходной z(t) |
|
Поясним теперь, почему время автоматического регулирования процесса подъёма уровня воды в бачке tк = 80 с получилось в два раза больше, чем при ручном регулировании tк = 40 с – сравните рис. 4 и рис. 5.
Нетрудно проверить, что линейный закон убывания расхода воды в бачке при подъёме поплавка имеет следующий вид
q(t)=q0 (1−ttк ) .
Действительно, при t = 0 с, получаем по этой формуле q(t) = q0, а при t = tк имеем по формуле q(t) = 0. Сравним с рис. 5.
Исходное дифференциальное уравнение баланса воды имеет вид
q(t)=S dzdt ,
куда вместо расхода в левой части q(t) подставим линейную зависимость и получим
q0 (1− t )=S dz . tк dt
Интегрируем это уравнение в тех же пределах, что и в предыдущем варианте. После несложных выкладок получим время автоматического регулирования (время установления) процесса подъёма уровня воды в бачке
tк = |
2 S zк |
= |
800см2 10 см |
=80c , |
||
q0 |
200 см3 |
/c |
||||
|
|
|
||||
оно действительно получилось в два раза больше, чем вручную.
10

3-й вариант наполнения водой бачка – расход воды из клапана q(t) убывает нелинейно, то есть по закону кривой линии затухающего процесса, как показано на рис. 6. Замер параметров выполнен с помощью опыта, экспериментом (практика – критерий истины).
|
|
q, z |
|
|
q |
0 |
= 200 см3/с |
|
|
|
|
|
|
|
|
|
zк = 10 см |
|
|
|
|
z |
|
1 |
|
|
|
2 |
|
|
|
|
|
|
|
|
0 |
|
|
|
|
0 |
t |
tк = 90 с |
|
|
Рис. 6. Параметры: 1– входной q(t); 2 – выходной z(t) |
||
Точками на кривой 2 уровня воды на рис. 6 показаны экспериментальные замеры z(t) с помощью секундомера. Кривая 2 является фактическим выходным параметром, то есть самым достоверным, так как получена с помощью опыта. Точки расхода воды qi(t) на кривой 1 на рис. 6 вычислены по формуле конечных разностей в виде
qi(t )=S |
z |
, |
|
t |
|
где z – разность отметок уровня воды, см; t – интервал времени между замерами, с. Попутно заметим, что отношение этих двух величин приближённо заменяет производную dz/dt, являющуюся мгновенной скоростью подъёма уровня воды в предыдущих вариантах 1 и 2. Такая замена производной конечными разностями широко используется в практике автоматизации. Просто, но надёжно.
Сравнивая 2 и 3 варианты, видно, что теоретический линейный алгоритм автоматического регулирования (см. рис. 5) и фактический нелинейный график регулирования (см. рис. 6) по выходному параметру уровня воды в баке достаточно удовлетворительно совпали. Потому линейные (линеаризованные) типовые схемы регулирования широко применяют в практике автоматизации.
11

Пример 3.
Пуск электрической цепи с катушкой индуктивности.
В 1887 году в Англии Óливер Хевисайд (Oliver Heaviside) предложил добавить катушку индуктивности в электрическую цепь для коррекции возникавших искажений в линии связи трансатлантического телеграфа. Электричество играет огромную роль в автоматизации ТГВ, поэтому рассмотрим пример пуска электрической цепи с катушкой индуктивности (рис. 7).
Рис. 7. Пуск электрической цепи с катушкой индуктивности:
U — источник напряжения, В; K — ключ; R — сопротивление, Ом; L — катушка индуктивности с коэффициентом самоиндукции L, В·с/А
Справа на рис. 7 ступенчатым графиком показано напряжение U(t), В. Такой график иногда называют ступенчатой функцией Хевисайда. Там же изображена кривая нарастания (установления) во времени силы тока I(t), А. Сила тока стремится к пределу U/R, А.
С точки зрения автоматизации входным параметром является напряжение U, В. Найдём выходной параметр – силу тока I(t), А.
Исходное дифференциальное уравнение электрического тока запишем по правилу Кирхгофа о том, что напряжение источника тока равно сумме падений напряжений на сопротивлениях электрической цепи
U =R I (t)+L dIdt(t) ,
где все обозначения см. на рис. 7. Переменными величинами являются сила тока I(t) и время t (независимая переменная).
В 1-м и 2-м примерах такие уравнения мы решали методом разделения переменных. Но тут применим основной в автоматизации операторный метод Лапласа (в простой манере, в стиле Хевисайда).
12

Оператор d/dt заменим на букву p с размерностью 1/с. Отметим, что в иностранной англоязычной литературе вместо p пишут s. Это одно и тоже. Переменную I(t) заменяем на её изображение J(p). Константу U разделим на p. В результате вместо дифференциального уравнения электрического тока в оригиналах имеем алгебраическое уравнение в изображениях по Лапласу в виде
Up =R J (p)+L p J (p) ,
откуда выразим изображение силы тока
J ( p)= |
U |
=U |
( |
1 |
− |
1 |
) , |
|
p (R+L p) |
R |
|
p |
|
p+R/ L |
|
причём дробь разложили на простейшие с целью использования стандартного табличного обратного преобразования Лапласа.
В автоматике решением в изображениях иногда ограничиваются. Имея такое решение для автоматического регулятора, можно найти его передаточную функцию W(p) в изображениях Лапласа как отношение выходного параметра Y(p) к входному X(p) при нулевых начальных условиях. Доведём решение до конца.
Получив решение в изображениях, сделаем обратное преобразование Лапласа и получим решение в оригиналах в виде силы тока I(t).
Дополнительно покажем как, с помощью Интернета и свободной программы Maxima, легко сделать такие обратные преобразования. Заходим на сайт http://maxima.cesga.es/, набираем в жёлтой строке для правой дроби в скобках
ilt(1/(p + R/L), p, t),
щёлкаем по кнопке Clic, после чего ниже видим ответ для правой дроби в скобках:
e− |
t R |
L . |
Таким путём далее, после несложных выкладок, получим решение в оригиналах для изменяющейся во времени силы тока в цепи (см. рис. 7)
|
U |
|
R |
|
I (t )= |
(1−e |
− L t |
) . |
|
R |
|
|||
|
|
|
|
|
Таким образом, на трёх базовых примерах мы начали знакомиться |
||||
с теорией и практикой автоматизации ТГВ. К этим примерам в дальнейшем иногда будем возвращаться.
13
1. ОСНОВЫ АВТОМАТИЗАЦИИ ТГВ
1.1. Уровни автоматизации систем ТГВ
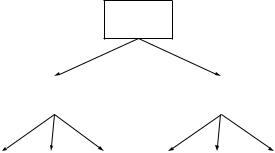
Уровни автоматизации систем ТГВ показаны на рис. 8.
1АСУП
|
2 |
АСУ ТП |
|
|
|
АСУ ТП |
|
|||||||||
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
САР |
|
САР |
САР |
САР |
САР |
САР |
|||||||||
Рис. 8. Уровни автоматизации систем ТГВ: 1 – верхний; 2 – средний; 3 – нижний
АСУП – автоматизированная система управления предприятием, верхний уровень. Обычно это система в масштабах города, например городское централизованное теплоснабжение, распределительная система газоснабжения и др.
АСУ ТП – автоматизированная система управления технологическим процессом, средний уровень, обычно для здания или его части. Например, автоматизированная система отопления здания, система вентиляции здания и др.
САР – система автоматического регулирования, нижний уровень автоматизации. Примером являются автоматические регуляторы давления, температуры, расхода воды, пара, газа, воздуха и др.
Для ТГВ большее значение имеет изучение среднего и нижнего уровней в связи с получением необходимых основ проектирования автоматизации внутренних инженерных систем зданий. Тем не менее надо знать и верхний уровень автоматизации, так как наружные системы оказывают влияние на работу внутренних систем зданий.
Например, в случае автономного теплоснабжения многоэтажного здания при применении газовой крышной котельной, всё равно сохраняется зависимость местного генератора тепла от наружных распределительных сетей газоснабжения и электроснабжения. При их аварийном отказе последует отказ и автономного теплоснабжения.
14
Термины теории автоматического управления
При изложении теории автоматического управления (ТАУ) ограничимся лишь самыми важными терминами и определениями.
Управление – это воздействие на объект для достижения цели. Теория автоматического управления является фундаментальной базой автоматизации систем ТГВ.
Система управления – это совокупность всех устройств для целевого воздействия на объект. Уровни систем управления ТГВ показаны на рис. 8.
Регулирование – это частный (локальный) случай управления с целью поддержания заданного режима объекта. Например, автоматический терморегулятор радиатора отопления в здании может служить для поддержания постоянной комнатной температуры воздуха +20 ºС.
Системы автоматического регулирования (САР) представляют нижний уровень автоматизации. Примером являются автоматические регуляторы давления, температуры, расхода воды, пара, газа, воздуха и другие.
Объект регулирования (управления) в ТГВ – это здание, его часть или инженерная система, её часть, где режим работы поддерживается управляющими воздействиями.
Регулятор – совокупность устройств для поддержания заданного значения регулируемого параметра без участия человека.
Возмущение – это внешнее воздействие, нарушающее связь между входным x(t) и выходным y(t) параметрами САР.
Регулирующий параметр – входной x(t), то есть физическая величина на вход в регулятор. Например, для регулирования бака с уровнем воды входным параметром является расход втекающей воды q(t), что было рассмотрено во 2-м базовом примере введения, см. с. 7.
Регулируемый параметр – выходной y(t), физическая величина, связанная с объектом регулирования. Например, это температура воздуха в комнате, обогреваемой радиатором отопления в 1-м базовом примере введения, см. с. 5.
Обратная связь (feedback англ.) – это информация (сигнал), передаваемая от объекта регулирования обратно на вход в регулятор для корректировки выходного параметра. Положительная обратная связь усиливает, отрицательная – уменьшает выходной параметр.
15
Рассогласование (отклонение) – это разность между заданным эталонным значением выходного параметра и фактически измеренным значением параметра регулируемого объекта. Например, в комнате требуется температура +20 ºС, а электроконтактный термометр определил фактическую температуру +18 ºС, значит рассогласование +2 ºС. Соответственно, обратная связь будет положительная и терморегулятор усилит подачу расхода горячей воды Т1 в радиатор отопления с целью поднять температуру — выходной параметр объекта регулирования (комнаты) до +20 ºС (см. 1-й базовый пример и рис. 1).
Задатчик – это устройство для задания значения требуемого параметра объекта регулирования. В 1-м базовом примере это шаг 1 – задать требуемую температуру +20 ºС для воздуха комнаты. Вращая белую ручку автоматического терморегулятора (см. рис. 2), надо установить её напротив метки, соответствующей +20 ºС. Во 2-м базовом примере (см. рис. 3) задатчиком является уровень воды максимальной конечной отметки zк = 10 см, соответствующий закрытию клапана, подающего холодную воду из хозяйственнопитьевого водопровода В1.
Датчик – это устройство для первичного измерения параметра САР: входного, выходного. Он получает информацию от объекта в виде энергии. Датчики бывают: электрические, гидравлические, пневматические, механические. Самые распространённые сейчас – электрические датчики, например, термопара для измерения температуры. Самые древние датчики – механические, например, поплавок (см. рис. 3). Самые надёжные датчики – гидравлические. Пневматические – взрывобезопасные датчики (газоснабжение).
Классификация датчиков по измерению параметра системы ТГВ:
–абсолютного давления;
–избыточного давления;
–разрежения (вакуума);
–давления-разрежения (вакуума);
–разности (перепада) давления;
–расхода;
–уровня жидкости;
–температуры (термопара, термометр сопротивления, пирометр);
–влажности;
–химического состава газа и воздуха (газоанализаторы).
16
Усилитель – устройство для увеличения значения слабого сигнала первичного измерения параметра сразу после датчика. К примеру, у бачка (см. рис. 3) действие датчика-поплавка усиливается рычагом (механический усилитель) для дальнейшей передачи обратной связи на клапан, подающий воду в бачок.
Исполнительный механизм (сервомотор) — устройство после регулятора для силового воздействия на регулирующий орган с целью установления выходного параметра. Например, рычаг поплавка (см. рис. 3) в комплекте с корпусом клапана можно считать регулятором с исполнительным механизмом, а сам клапан, запирающий воду из водопровода – регулирующим органом.
Регулирование по отклонению – способ, когда входной параметр x(t) по обратной связи изменяют в зависимости от рассогласования выходного параметра y(t) с эталонным заданным значением (см. 1-й пример). Этот способ широко применяется в ТГВ. САР с таким регулированием называют замкнутыми, то есть с обратной связью.
Регулирование по возмущению – способ, при котором входной параметр x(t) изменяют в зависимости от внешнего воздействия, причём обратная связь отсутствует. Применяется в ТГВ реже. САР с таким регулированием называют разомкнутыми, то есть без обратной связи. Например, регулирование отопления в комнате производят по замерам наружной температуры, а не внутренней.
Регулирование по отклонению и возмущению – способ комбинирования замкнутой и разомкнутой системы. Например, температуру измеряют внутреннюю (выходной параметр с обратной связью) и наружную (внешнее воздействие без обратной связи). Этот способ в ТГВ применяют нечасто.
САР с предварением – система, в которой на объекте сразу измеряют и рассогласование, и скорость изменения рассогласования, а затем вычисляют предсказанное рассогласование – его то и подают по обратной связи на вход в регулятор, тем самым добиваясь ускорения регулирования системы.
Сумматор – устройство, определяющее рассогласование и передающее его значение регулятору.
Перерегулирование (заброс) – это отклонение (рассогласование), выходящее за допустимые пределы. Это может привести к сбою автоматики.
Автоматика – это техника автоматизации.
17

П-регулятор – пропорциональный регулятор, дающий усиление выходного сигнала yi(t) на i-тый момент замера – по закону пропорциональности в виде
yi (t )=K p Ei ,
где Kp – коэффициент пропорциональности (усиления); Ei – рассогласование (отклонение) параметра на момент i-го измерения. Например, автоматический терморегулятор радиатора отопления, показанный на рис. 1 и рис 2, имеет встроенный простейший П-регулятор.
ПД-регулятор – пропорционально-дифференциальный регулятор, усиливающий выходной сигнал по пропорциональному закону с учётом скорости изменения рассогласования
y |
(t )=K (E |
+τ Ei ) , |
|
i |
p i |
диф |
t |
|
|
|
|
где t – шаг времени между соседними замерами (см. рис. 6), как приближённый аналог математического дифференциала dt, с; τдиф – время дифференцирования (время предварения), как сумма нескольких предыдущих t при замере рассогласований, с; Ei – разность рассогласований на i-тый момент измерения (текущее Ei минус предыдущее Ei-1); остальные обозначения см. в формуле П-регулятора. Второе слагаемое в скобках является дифференциальной поправкой к рассогласованию. Эта поправка ускоряет процесс регулирования.
ПИ-регулятор – пропорционально-интегральный регулятор. Его закон регулирования такой:
|
|
|
1 |
|
n |
|
y |
(t )=K (E |
+ |
E t ) , |
|||
i |
p i |
|
τинт |
∑ |
i |
|
|
|
|
|
|
i=0 |
|
где τинт – время интегрирования (время изодрома), то есть n-сумма нескольких предыдущих t, с; др. обозначения см. выше. Второе слагаемое в скобках является интегральной поправкой к рассогласованию. Процесс регулирования становится плавным.
ПИД-регулятор – пропорционально-интегрально-дифференци- альный регулятор (комбинация предыдущих). Это самый совершенный и широко применяемый регулятор. Закон регулирования выходного сигнала yi(t) имеет вид
|
|
|
1 |
|
n |
|
|
Ei ) . |
y |
(t )=K (E |
+ |
E t +τ |
|||||
i |
p i |
|
τинт |
∑ |
i |
диф |
t |
|
|
|
|
i=0 |
|
|
|||
Процесс регулирования плавный и быстрый. Величины Kp, τинт и τдиф назначают при сдаче в эксплуатацию вручную или автонастройкой.
18
Техника автоматизации систем ТГВ
В настоящее время в России действует ГОСТ Р 8.596-2002 по метрологическому обеспечению измерительных систем (ИС) при их проектировании, изготовлении, монтаже и наладке на объекте строительства и эксплуатации.
Тенденции развития автоматизации, заложенные в этом ГОСТе, направлены на всё большее внедрение информационных технологий, особенно на применение программируемых контроллеров и промышленных компьютеров. Контроллер – это цифровое устройство, выполняющее управление технологическим процессом по алгоритму, с получением сигналов от датчиков и подачей команды исполнительному механизму.
Тем не менее в эксплуатации остаются и простые старые приборы автоматики. Например, на кухне квартиры на газовом баллоне ставят редуктор для автоматического понижения давления сжиженного газа, выходящего из баллона по трубе к газовой плите. Автоматика этого редуктора простейшая, механическая, никаких контроллеров и компьютеров не требуется.
Поэтому дальнейшее изложение основ автоматики и автоматизации ТГВ будем проводить с учётом современных тенденций развития с новыми устройствами, но не забывая и про старые простые технологии, обычно без электричества.
Измерительный комплекс (ИК) — относительно новое понятие, появившееся в последнее время. Оно подразумевает объединение в одной коробке сразу нескольких приборов измерения. Например, ИК может одновременно иметь термометр, манометр и расходомер.
ГСП – это государственная система промышленных приборов и средств автоматизации для нужд народного хозяйства и экспорта.
Измерительные приборы позволяют производить автоматический контроль параметров на объекте регулирования: температуры, давления, расходов воды, воздуха и т.д. На уровне САР – нижний уровень (см. рис. 8) – параметры регулирования приводят в соответствие с заданными. На уровне АСУ ТП (средний уровень) – выводят на оптимальный режим работы (см. рис. 8).
К измерительному прибору, как вариант, подключают регистрирующий прибор, записывающий динамику изменения параметров, для дальнейшего анализа хода процесса.
19