


СибАДИРис. 18. стема мон тор нга Рис. 19. Включение блоков ГТ6.0.8 в магистраль каркаса здан я
4.4. Программное обеспечение системы мониторинга
Возможности автомат зированных SCAD Office, осуществляющих непрерывную оценку текущего напряженно-деформированного состояния конструкций зданий ли сооружен й, во многом определяются входящим в их состав программным обеспечен ем. Как правило, основной задачей программного обеспечения является непрерывный с ор ольшого количества данных, поступающих с датчиков сенсорных узлов на центральный сервер, с последующей их обработкой. Известные алгор тмы СМ основаны на обнаружении повреждений в конструкциях зданий или сооружений в течение всего периода их эксплуатации. Методы, разработанные для обнаружения повреждений, могут быть классифицированы как частотные или временные [17].
Частотные методы о наружения повреждений связывают возникающие дефекты с изменением жесткости конструкций. Эти методы используют конечно элементные модели и линейные модальные параметры, такие, как естественные частоты и формы мод для идентификации повреждений, а в некоторых случаях, даже для определения местоположения повреждения [18]. Модальные свойства, подобные естественным частотам мод конструкций, наблюдаются в неповрежденных конструкциях. Полагают, что если имеют место изменения в модальных параметрах конструкции в течение всего периода ее эксплуатации, то эти изменения связаны с возникновением повреждений. Выделение модальных параметров из функций частотного поведения, полученных, в свою очередь, из данных вибрационных испытаний, выполняется таким же образом, как в традиционных модальных испытаниях. Эти методы успешно применяются для идентификации больших уровней повреждений в конструкциях, но они неспособны установить момент возникновения повреждения. К тому же, по отношению к конструкциям зданий и сооружений окружающая среда или изменение режима эксплуатации могут также вызвать изменения в естественных частотах и формах мод, что затрудняет использование частотного метода в случаях возникновения экстремальных повреждений.
Временные алгоритмы основаны на вычислении определенных параметров через заранее установленный период времени. К этим параметрам относятся деформации (напряжения), прогиб конструкций, крен зданий, амплитуда колебаний, которые вычисляются и сравниваются с нормируемыми значениями.
27
Нормируемые значения регламентированы в соответствующих строительных нормах России.
В настоящем проекте при текущей оценке технического состояния конструкций гимнастического комплекса «Буртасы», применен алгоритм, основанный на времени.
4.5.Программное обеспечение SCAD Office
Программное обеспечение рассчитано на работу на персональном компьютере под СибАДИуправлением операционной системы Windows (XP SP2, 2000 SP4), оптимальными характер ст ками которого являются частота процессора 1.8 ГГц 2 ядра (3.2 ГГц 1 ядро), ОЗУ 2 ГБ, налич е на жестком диске 30 МБ для программного обеспечения и 120 ГБ для протокола Microsoft .Net Framework 2.0. Структурная схема про-
граммы пр ведена на р с. 14, а пример вывода информации на рис. 20
Датчики на элементах инженерного сооружения
Аппаратныйинтерфейс
(Geotek.SMIS.Alarm.dll)
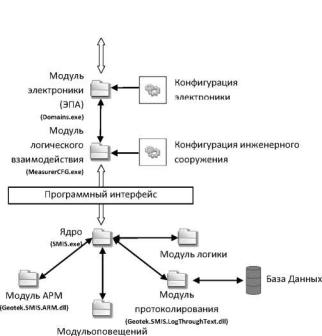
Рис. 20. Модули программного комплекса «GEOTEK SHM»
Программное обеспечение системы состоит из модулей электроники, модуля логического взаимодействия, ядра системы набора динамически подключаемых модулей. Конфигурирование производится последовательно от модуля электроники (блок ГТ6.0.8) к ядру и подключаемым модулям.
28
СибАДИР с. 21. Пр мер одного из «окон» рабочего места оператора
Перед эксплуатац ей программного комплекса системы производится конфи-
гурирован е. Этап конф гурирования в рассматриваемом проекте начинается после решен я следующ х предварительных задач.
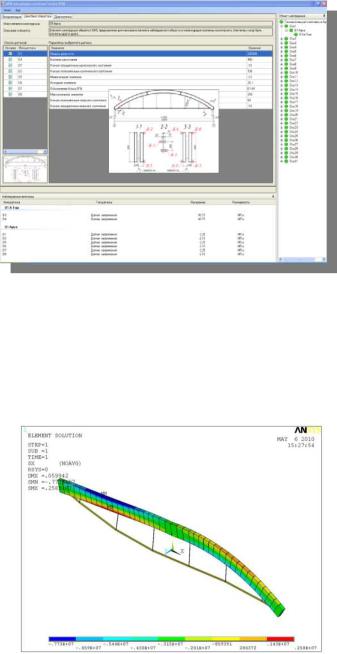
Рис. 22. Распределение нормальных напряжений в арке под действием несимметричной снеговой
нагрузки
1. Статический расчет конструкций здания с определением их напряженно-
деформированного состояния (НДС). Расчет Н выполнен с использованием
программного комплекса SCAD Office (www.ansys.com) . Некоторые результаты расчетов приведены на рис. 22. Полный технический отчет расчета НДС можно найти на сайте: www.geoteck.ru/.
2.Оценка результатов расчетов с определением наиболее нагруженных элементов конструкций.
3.Определение мест размещения датчиков с оценкой начальных значений контролируемых параметров (деформация, прогиб, угол наклона и т.д.).
4.Выбор технических средств, включая устройства сбора данных (модули электроники), датчики и кабельные сети.
29
В ходе конфигурирования производятся следующие действия:
-создается конфигурация модулей электроники согласно разработанной спецификации;
-после завершения монтажных работ системы выполняется проверка электроники на соответствие спецификации, производятся мероприятия по отладке модулей электроники, в ходе которых обновляются заводские параметры в соответствии с условиями эксплуатации;
-создается дерево наблюдаемых системой элементов конструкций, определя-
СибАДИются и настраиваются измерительные каналы системы, создаются измеряемые параметры элементов конструкций, заносятся начальные показания измеряемых параметров, заносятся данные, необходимые для измерения параметров;
- создаются граф ческ е бланки элементов конструкций, планов здания, для отображен я состоян я элементов конструкций здания, производится проверка их соответств я тем элементам конструкций, которые обозначены в программе;
- создается подключаемый программный модуль логики, в котором содержатся прикладные алгоритмы расчета состояний элементов конструкции. Задействуются графическ е компоненты для визуализации работы алгоритмов;
- на граф ческ х ланках элементов конструкций и планов здания определяются места расположен я элементов конструкций, датчиков, отображаются особенности монтажа;
Для эксплуатац программного обеспечения требуется минимум одна штатная единица персонала - оператор. Оператор постоянно находится у головного компьютера системы «GEOTEK SHM» и следит за показаниями на мониторе (см. рис. 21). Оператор должен о ладать практическими навыками работы с графическим пользовательским интерфейсом операционной системы Windows, знать принципы обслуживания системы «GEOTEK SHM». нализ выдаваемой системой «GEOTEK SHM» информации производит инженер. Инженер должен иметь высшее техническое образование по профилю строительных конструкций, навыки обследования строительных конструкций, знать принципы работы системы «GEOTEK SHM», уметь интерпретировать выдаваемые системой данные о наблюдаемом объекте.
4.6. Методика оценки напряженно-деформированного состояния конструкций
Методика оценки напряженно-деформированного состояния конструкций и оснований зданий сооружений принята следующей.
Используя результаты расчета напряженно-деформированного состояния конструкций здания, находятся области концентрации напряжений и величины перемещений элементов конструкции при их нагружении собственным весом, снеговой и ветровой нагрузками. В местах концентрации напряжений проектируемой конструкции устанавливаются датчики деформации, а в местах максимальных перемещений (прогибов) устанавливаются датчики перемещения. Значения напряжений и перемещений являются проектными на момент ввода здания или сооружения в эксплуатацию. Текущие значения измеряются аппаратной частью системы мониторинга и сравниваются с проектными значениями. Приращения текущих значений добавляются к проектным при этом суммарные значения не должны превышать нормативные значения прочности, прогиба или перемещения элементов конструкций.
30
Расчет напряженно-деформированного состояния конструкций выполняется с использованием мощного вычислительного пакета SCAD Office Этот комплекс является одним из современных средств автоматизированного инженерного анализа, наиболее эффективным расчетным методом оценки деформированного состояния и прочности, прогнозирования долговечности и оптимизации элементов строительных конструкций.
5. АЛГОРИТМ ОБНАРУЖЕНИЯ ОТКЛОНЕНИЙ В ПОКАЗАНИЯХ
ДАТЧИКОВ ПО КОРРЕЛЯЦИОННЫМ СВЯЗЯМ
СибАДИсоответствуют датчики. Ненулевое значение в ячейке означает, что датчики имеют схожее поведение (коррелируют), нулевое - датчики не коррелируют. Признак коррелирования определяется порогом, т.е. для коррелирующих датчиков коэффициент корреляции между ними (по модулю) должен быть больше либо равен порогу (обычно 0,7). Используется для определения корреляционных групп.
Данный алгор тм основан на предположении что в измерительной системе имеются датч ки, обладающ е схожим поведением во времени. Например, датчики, расположенные на одн х тех же элементах строительных конструкций, находящиеся под вл ян ем одн х и тех же внешних факторов и т.д. Фактически, эти датчики образуют т.н. “скрытое резервирование”, то есть косвенное резервирование, основанное на том, что эти датчики ведут себя одинаково (рис. 23) [19]
|
Рис 23. Пример коррелирующих датчиков на конструкции |
|
Ключевым понятием в алгоритме является понятие “снимок состояния”. |
|
Снимок состояния - совокупность данных за определенных временной период, |
состоящая из следующих компонентов: |
|
- |
StartDate - начало временного периода; |
- |
EndDate - конец временного периода; |
- Data - показания датчиков, снятые в течение указанного периода; |
|
- |
Correlation - корреляционная матрица датчиков. |
- |
CorrelationFlags - квадратная разреженная матрица, столбцам строкам которой |
-MeanCorrelation - средние значения коэффициентов корреляции каждого датчика
состальными датчиками. Подразумевается, что в устойчивой корреляционной группе они существенно изменяться не должны. Используется для выявления отклонений в корреляционных группах.
Снимок состояния может формироваться как для всех датчиков, так и для отдельной группы датчиков.
Длительность периода между EndDate и StartDate называется временнымокном. Размер временного окна определяется специалистом (обычно несколько недель).
31
Последовательным перемещением временного окна по оси времени, фор-
мируется последовательность снимков состояния. При этом конец предыдущего временного периода является началом следующего.
Приведем описание последовательности шагов алгоритма, начиная с этапа обучения:
1.Начало эксплуатации системы мониторинга.
2.бор данных в течение 0,5 - 1 года. При этом аналитическая часть алгоритма не работает.
СибАДИ3. начала эксплуатации системы мониторинга прошло 0,5 - 1 года. пециалистом вручную анализируются собранные данные на предмет корреляционных связей, вручную определяются корреляционные группы. Также подбираются размер временного окна и порог корреляции.
4. Закончен начальный этап обучения системы.
5. Во время работы с стемы, автоматически формируются снимки состояния для каждой корреляц онной группы. Текущие значения MeanCorrelation сравниваются с предыдущ ми эталонными. В случае серьезного отклонения (более чем на 0,2) вывод тся предупреждения с указанием отклонившегося датчика или группы датч ков. Подро ности определяются по матрице Correlation. Если отклонился од н датч к - предполагается неисправность датчика, если несколько - предполагается отклонен я в поведении конструкции. Обязательно должна быть предусмотрена возможность принятия оператором решения о ложной тревоге. При этом снимок признается эталонным, но при этом учитывается время снимка, то есть время года, когда ыл сделан снимок (текущий месяц).
Формирование корреляционных групп. Корреляционные группы должны вручную определяться специалистом. По данным, собранным за первые 0,5 - 1 год работы системы рассчитывается последовательность снимков состояния (берутся все однотипные датчики). При этом целесообразно сформировать несколько последовательностей, варьируя величину временного окна порога, например, взять пороги 0,8; 0,75; 0,7; а окно - 3, 2, 1 недели. Комбинируя различные варианты, получим 9 последовательностей.
Далее в этих последовательностях вручную сравниваются матрицы CorrelationFlags. Для удобства представления они упорядочиваются алгоритмом Катхилла-Макки (Cuthill-McKee). Выбирается последовательность, где формируется наибольшее количество устойчивых корреляционных групп.
По изображению упорядоченной матрицы оператор оценивает датчики, которые сгруппировались в результате упорядочивания (находятся в соседних ячейках матрицы). При этом данная группировка должна быть устойчивой, то есть сохраняться на протяжении большинства снимков последовательности. Эти датчики формально объединяются в корреляционную группу. Необходимо, по возможности, объединить в корреляционные группы как можно больше датчиков. После формирования корреляционных групп система может приступить к автоматизированному анализу показаний датчиков.
Выявление отклонений в показаниях датчиков. Отклонения в показаниях датчиков выявляются путем сравнения снимков состояния корреляционных групп. Система сравнивает средние значения MeanCorrelation нового снимка с предыдущим снимком. В случае отклонения более чем на 0,2 возникает тревожная ситуация.
32
В результате выводится сообщение об отклонениях в системе. Если отклонился один датчик - предполагается неисправность датчика, если несколько - предполагается отклонения в поведении конструкции.
Если эксплуатирующей организацией принято решение, что тревога ложная и состояние датчиков в норме, оператор отмечает данную тревогу как ложную. При этом снимок, который являлся причиной тревоги, заносится в базу эталонных. Это означает, что в случае возникновения схожих отклонений в данные период года, система не будет выдавать предупреждения, считая данный отклонения нормой
СибАДИ/12/.
Испытания алгоритма. Испытания проводились на данных второй очереди дворца спорта “Буртасы” (г. Пенза). Приведем некоторые результаты по датчикам температуры (р с. 24)
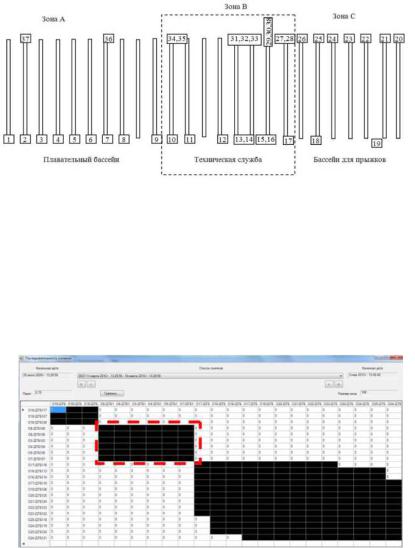
Рис. 24. Размещение датчиков температуры на элементах конструкций (арки, колонны) спорткомплекса «Буртасы», г. Пенза
На рис. 25 изображена упорядоченная корреляционная матрица снимка состояния для датчиков температуры в период с 7 января 2010 по 14 января 2010 (1 неделя). Порог равен 0,7.
Рис. 25. Снимок датчиков температуры в период с 7 января 2010 по 14 января 2010
Рассмотрим корреляционную группу, состоящую из датчиков №3, №4, №5, №6, №7, №8. Эта группа является устойчивой, поскольку сохраняется в различных снимках, например, на рис. 26 изображена матрица за период с 11 марта 2010 по 18 марта 2010. Как видно из рис. 26, корреляционная группа сохранилась
33
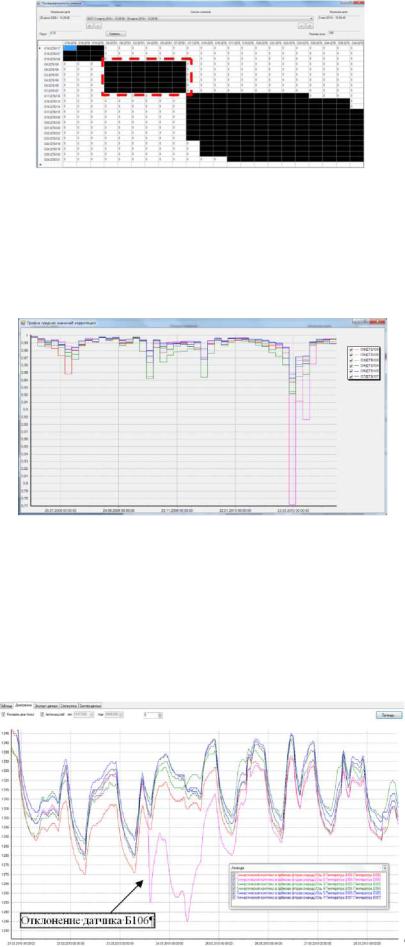
СибАДИРис 26. Снимок датчиков температуры в период с
11 марта 2010 по 18 марта 2010
Если же сделать последовательность снимков для данной группы посмотреть на граф ки средн х значений корреляции, то увидим существенное отклонение в период с 18 марта 2010 по 25 марта 2010 (рис. 27).
Рис. 27. Средние значения коэффициентов корреляции
Подобные отклонения должны расцениваться как подозрительные. Причиной данной аномалии стало отклонение датчика Т-Б106, произошедшее с 23 по 25
марта 2010 (рис. 28).
Рис. 28. Отклонение датчика Б106
34
Из рис. 28 понятно, что отклонение Б106 вызвано каким-то внешним воздействием (локальным охлаждением), а не неисправностью. Об этом говорит то, что после 25 марта показания датчика пришли в норму.
По результатам испытаний можно утверждать, что алгоритм способен выполнить поставленную задачу. Достоинства алгоритма:
1.пособность анализировать данные мониторинга на предмет аномалий.
2.Отсутствие сложных математических вычислений, а, следовательно, высокая скорость работы.
СибАДИ3. Относительная простота реализации.
4. Возможность работы не только в оперативном режиме, но и в режиме постобработки, то есть, когда данные анализируются вне рамок автоматизированной системы мон тор нга.
Недостатки алгор тма:
1. Необход мость участия специалиста в формировании корреляционных групп.
2. Не все датч ки могут о ъединиться в корреляционные группы, в результате чего отдельные датч ки не могут анализироваться алгоритмом.
Таким образом, эффективность алгоритма сильно зависит от конфигурации и качества змер тельной с стемы. В ООО НПП “Геотек” ведется постоянная работа
по усовершенствован ю данного алгоритма.
Другие пр меры пр менения статических систем мониторинга можно найти на сайте ООО «НПП Геотек» www.geoteck.ru.
6. ПРИМЕР РЕАЛИЗАЦИИ СТ ТИЧЕСКОЙ СИСТЕМЫ МОНИТОРИНГА СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ М ШИННОГО ЗАЛА ЭНЕРГОБЛОКА
СМК разработана для строительного объекта, который включает в себя машинный зал и деаэраторное отделение. Планы и разрезы машинного зала и деаэраторного отделения показаны на рис. 2-5.
Конструкции машинного зала
Здание машинного зала имеет габариты 127 м х 45 м (по осям -Б и 1-12) и отметку низа ферм покрытия +35,50 м. Машинный зал имеет металлический каркас.
Деаэраторное отделение и машинный зал имеют общий подвал на отметке - 3,60 м.
Также в машинном зале расположен турбоагрегат его вспомогательное оборудование. Для обслуживания турбоагрегата имеются металлические площадки на отметках +5,10 м; +11,70 м; +15,00 м; +16,20 м.
Впролете машинного зала расположены два мостовых крана - грузоподъемностью 200/32т пролетом 42 м (отметка головки рельса +29,50 м) и грузоподъемностью 15т пролетом 40 м (отметка головки рельса +23,90 м).
Восях 1 -2 вдоль стены реакторного отделения расположена этажерка для обслуживания технологических трубопроводов, которая имеет размеры в плане 45
х6 м и высоту 24 м. Этажерка выполнена из металлических прокатных профилей и металлических рифленых настилов.
35

Для сквозного проезда через здание железнодорожного транспорта в наружном стеновом ограждении по осям А и В, а также 10 и 11, на отметке 0,000 м предусмотрены ворота. Для въезда в здание автотранспорта предусмотрены подъемно-складчатые ворота в наружном стеновом ограждении в осях 2-3.
Конструкции деаэраторного отделения
Деаэраторное отделение располагается вдоль машинного зала и имеет габариты в плане 127 м х 12 м. Отметка низа балки покрытия имеет отметку +42,00 м. На отметке 0,000 располагается регенерационная установка БОУ и питательные
СибАДИнасосы. На отметке +15,00 м расположены: установка кондиционеров, установка фильтров-сеток, установка панелей БОУ, приточная венткамера. Под отметке +15,00 м предусмотрены площадки для обслуживания питательных насосов, на отметке +15,00 - площадки пароэжекторных машин
36

СибАДИ
37
Рис. 30. План машинного зала и деаэраторного отделения на отметке 0,00 м

СибАДИ
38
Рис. 31. Продольный разрез деаэраторного отделения
7. СИСТЕМА МОНИТОРИНГА КОНСТРУКЦИЙ МАШИННОГО ЗАЛА
Назначение
истема мониторинга предназначена для непрерывного инструментального мониторинга напряженно-деформированного состояния строительных конструк-
ций машинного зала энергоблока с целью оценки текущего технического состояния |
|
СибАДИ |
|
М обеспечивает: |
|
- сбор |
хранен е данных о НДС основных несущих строительных конст- |
рукций маш |
нного зала энергоблока в процессе его строительства и эксплуатации; |
- оценку текущего НДС основных элементов несущих строительных конструкц й маш нного зала;
- предоставлен е данных о НДС строительных конструкций машинного зала в открытых форматах хранения данных;
- автомат ческое оповещение о превышении проектных параметров НДС строительных конструкц й машинного зала.
Цели создан я с стемы мониторинга
Основными целями создания СМ являются:
- автоматизация измерений параметров НДС (деформаций, наклона, ускорения колебаний) элементов несущих строительных конструкций МЗ;
- оценка текущего НДС элементов несущих строительных конструкций МЗ на основе сравнительного анализа текущих измеренных параметров исторических (архивных) данных поведения объекта;
- повышение безопасности эксплуатации несущих строительных конструкций МЗ в период дополнительного срока эксплуатации;
- оптимизация срока ремонта несущих строительных конструкций.
-
Описание проектного решения
В рабочем проекте система мониторинга состоит из двух частей:
- подсистемы статического мониторинга (далее по тексту - ПСМ). - подсистемы динамического мониторинга (далее по тексту - ПДМ).
39

Данные подсистемы являются полностью независимыми по аппаратному и программному обеспечению и не влияют на работу друг друга. Подсистемы разделены по контролируемым показателям согласно табл. 1.
Табл. 1
Разделение контролируемых показателей по подсистемам
|
Контролируемый показатель |
Подсистема |
|
Угол наклона верха колонны |
ПСМ |
|
СибАДИ |
|
|
Угол наклона (крен) |
ПСМ |
|
Деформац я на более нагруженных элементов |
ПСМ |
|
Температура |
ПСМ |
|
Ускорен е колебаний |
ПДМ |
|
Динам ческ е характер ст ки согласно РБ- 045-08 |
ПДМ |
|
п. 3.3 |
|
остав контрол руемых показателей
Состав контрол руемых показателей определяется для строительных конструкц й согласно перечню приложения №4 к договору № 97 от 24.07.2009 г., а также пр ложен я №3 к договору № 97 от 24.07.2009 г. и принимается в соответствии с табл. 2.
|
|
Контролируемые показатели |
|
Табл. 2 |
||
|
|
|
|
|
||
|
№ |
Наименование |
Контролируемые показатели |
|
Количество |
|
|
п/п |
конструкции |
|
|
||
|
|
|
|
|
||
|
1 |
Колонна |
- угол наклона верха колонн здания |
|
24 |
|
|
2 |
Ферма покрытия |
- деформация наиболее нагруженных эле- |
168 |
|
|
|
|
ментов |
|
|
||
|
|
|
|
|
|
|
|
3 |
Внутренний объем |
- температура |
|
192 |
|
|
здания |
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
Фундамент |
- угол наклона (крен) |
|
8 |
|
|
турбоагрегата |
- ускорение колебаний |
|
4 |
|
|
|
|
|
|
|||
|
5 |
Каркас здания |
- динамические характеристики согласно |
28 |
|
|
|
|
РБ-045-08 п. 3.3 |
|
|
||
|
|
|
|
|
|
|
|
Расположение контролируемых показателей определено на основе расчета |
|||||
НДС несущих строительных конструкций машинного зала |
деаэраторного отде- |
|||||
ления энергоблока № 1 Балаковской АЭС (см. «Анализ напряжённодеформированного состояния несущих конструкций машинного зала энергоблока №1 Балаковской АЭС: технический отчет, том 2 / ООО «НПП «Геотек». - Пенза, 2010.»
Для ПСМ были выбраны точки с наибольшими напряжениями и перемещениями (линейными и угловыми) для элементов ферм покрытия и колонн. Это обеспечивает определение НДС в точках, характеризующихся наибольшими изменениями измеряемых величин.
40
СибАДИРис. 33. Схема расположения акселерометров на каркасе машинного зала и деаэраторного отделения
Для ПДМ выбраны точки, которые описывают геометрию каркаса. Также точки расположены в местах резкого изменения жесткости каркаса (наличие балок, мостового крана). Расположение акселерометров обеспечивает определение основных собственных форм частот колебания каркаса здания (см. рис. 33). Это в свою очередь позволяет следить за изменениями жесткостных характеристик частей здания.
На рис. 33 показано, что акселерометры размещаются в сечении четырех рам - по семь акселерометров в каждой из рам. Итого 28 акселерометров расположено на элементах каркаса.
Дополнительно акселерометры располагаются на несущих элементах турбоагрегата (железобетонных стенах) как показано на рис. 34. Такое размещение позволит вести мониторинг изменения жесткостных характеристик частей несущих конструкций турбоагрегата (аналогично конструкциям каркаса машинного зала и деаэраторного отделения).
41

СибАДИРис. 34. Схема расположения акселерометров на несущих элементах турбоагрегата
Более подробная информация о размещении инструментальных средств системы мониторинга находится в комплекте рабочих чертежей строительных конструкций машинного зала для оценки технического состояния остаточного ресурса в период дополнительного срока эксплуатации.
Подсистема статического мониторинга
Подсистема статического мониторинга предназначена для мониторинга статических параметров, характеризующих напряженно-деформированное состояние строительных конструкций МЗ. Статический параметр - параметр, изменение которого является продолжительным во времени. К статическим параметрам относятся прогиб конструкций, деформации, напряжения, крен и углы наклона. В данном проекте объектами мониторинга являются деформации наиболее нагруженных элементов конструкций, углы наклона верха колонны, крен здания и температура внутри здания.
42
Источником информации для ПСМ являются показания датчиков деформации, наклона и температуры, размещенные на строительных конструкциях МЗ. Важной функцией ПСМ является информирование пользователя об опасном состоянии конструкций.
Функции, выполняемые подсистемой
СибАДИ |
|
Подсистема выполняет следующие функции: |
|
- пер од ческ й контроль НДС ферм и колонн, крена фундамента турбо- |
|
агрегата, выдача нформации о месте превышения их проектных значений |
|
прочности деформац |
; |
- при пр бл жен |
измеренных значений напряжений и деформаций к |
предельным проектным значениям ПСМ выполняет постоянный контроль НДС несущ х стро тельных конструкций, формирует сигналы опасности, выдает информац ю о месте превышения проектных значений деформации;
- автомат ческая регистрация событий в оперативной памяти системы, выдача отчеты о со ыт ях в соответствии с запросом, а при наступлении событий по п. 2 выдача нформац ю автоматически;
- оповещен е оператора ПСМ при недопустимых значениях напряжений и деформац й несущ х строительных конструкций.
Определение состояния элементов конструкций
Текущее напряженно-деформированное состояние элементов конструкций определяется по показаниям датчиков, которые размещены в наиболее нагруженных местах основных несущих элементов конструкций здания. Эти места найдены из расчета НДС всего здания численным методом з этих расчетов были найдены предельные значения деформаций и наклона элементов несущих ферм покрытия колоннах здания, превышение которых является недопустимым.
43
В табл. 3 приведены возможные состояния, определяемые по показаниям датчиков.
Табл. 3
Состояния датчиков ПСМ
|
остояние |
Цветовое кодирование |
Описание |
|
В норме |
Зеленый |
|
|
СибАДИ |
||
|
|
|
Показание датчика находится в пределах до- |
|
|
|
пустимых значений, определенные расчетом |
|
Макс мальное |
Оранжевый |
Показание датчика превысило предупреж- |
|
предупреждающее |
|
дающее значение |
|
Макс мальное |
Красный |
Показание датчика превысило критическое |
|
кр т ческое |
|
значение |
|
Мин мальное |
Оранжевый |
Показание датчика опустилось ниже преду- |
|
предупреждающее |
|
преждающего значения |
|
Мин мальное |
Красный |
Показание датчика опустилось ниже крити- |
|
кр т ческое |
|
ческого значения |
|
Заблок рован |
Серый |
Показание датчика заблокировано и не может |
|
|
|
быть оценено |
С целью уменьшен я числа ложных тревог предусмотрен механизм блокировки датчика. Состояние за локированного датчика не оценивается ПСМ. Блокировка датчика нео ходима в следующих случаях:
1) О наружена неисправность датчика.
2) О наружена неисправность регистратора, к которому подключен датчик.
3) Датчик показывает ложное предельное состояние.
4) Имеются признаки недостоверности значения.
Перечень подсистем системы статического мониторинга, их назначение и основные характеристики
Назначение функции подсистем системы статического мониторинга, приведены в табл. 4.
44

|
|
|
|
Табл. 4 |
|
Подсистемы системы статического мониторинга |
|||
|
Название |
Назначение |
Функции |
Метод |
|
|
|
|
реализации |
|
Подсистема сбора |
Сбор показаний датчи- |
|
Аппаратная |
|
данных |
ков, расположенных на |
Первичная обработка показа- |
|
|
|
элементах строительных |
ний датчиков (фильтрация и |
|
|
|
конструкций и размеще- |
масштабирование) |
|
|
|
ние их в базе данных |
Периодическое снятие показа- |
Программная |
|
|
|
ний датчиков |
(SCADA-система, на |
|
|
|
|
базе ЭВМ) |
|
|
|
|
Программная |
|
|
|
Передача показаний датчиков в |
(SCADA-система, на |
|
|
|
подсистемы хранения, анализа |
базе ЭВМ) |
|
|
|
и визуализации данных |
|
|
Подсистема обработ- |
Определение текущего |
|
Программная |
|
ки и анал за данных |
состояния НДС строи- |
Определение текущего НДС |
(SCADA-система, на |
|
|
тельных конструкций |
основных элементов несущих |
базе ЭВМ) |
|
|
здания |
строительных конструкций |
|
|
|
|
Оценка достоверности показа- |
Программная |
|
|
|
ний датчиков |
(SCADA-система, на |
|
|
|
|
базе ЭВМ) |
|
|
|
|
Программная |
|
|
|
Передача данных о НДС |
(SCADA-система, на |
|
|
|
строительных конструкции в |
базе ЭВМ) |
|
|
|
подсистему хранения |
|
|
Подсистема хранения |
Хранение оперативных и |
|
Программная |
|
данных |
исторических данных |
Хранение оперативных и ис- |
(SCADA-система, |
|
|
|
торических данных системы |
СУБД, на базе ЭВМ) |
|
|
|
(показания датчиков, данных |
|
|
|
|
об Н С строительных конст- |
|
|
|
|
рукций) |
|
|
Подсистема визуали- |
Вывод на экран персо- |
|
Программная |
|
зации данных мони- |
нального компьютера |
Вывод на экран персонального |
(SCADA-система, на |
|
торинга и интерак- |
автоматизированного |
компьютера текущих показа- |
базе ЭВМ) |
|
тивного взаимодей- |
рабочего места оператора |
ний датчиков |
|
|
ствия с персоналом |
информации о НДС |
|
Программная |
|
|
строительных конструк- |
|
(SCADA-система, на |
|
|
ций, а также предостав- |
Вывод на экран персонального |
базе ЭВМ) |
|
|
ления оператору средств |
компьютера текущего Н |
|
|
|
для получения данных по |
строительных конструкций, а |
|
|
|
запросу |
также других результатов ра- |
|
|
СибАДИботы подсистемы обработки |
|
||
|
|
|
анализа данных |
|
|
|
|
Вывод на экран исторических |
Программная |
|
|
|
данных |
(SCADA-система на |
|
|
|
|
базе ЭВМ) |
|
|
|
Интерактивное взаимодействие |
Программная |
|
|
|
с персоналом через графиче- |
(SCADA-система, на |
|
|
|
ский интерфейс пользователя |
базе ЭВМ) |
|
|
|
|
|
45
Информационное обеспечение
Входящие в состав ПСМ подсистемы в процессе функционирования ведут обмен информацией на основе открытых форматов обмена данными, используя для этого входящие в их состав модули информационного взаимодействия. Все форматы данных приведены в соответствующей документации, поставляемой сторонними производителями.
В состав передаваемых данных входят: - данные о показаниях датчиков;
- данные о НДС несущих строительных конструкций.
СибАДИтическим опытом выполнения работ по установке, настройке и администрированию программных и технических средств, применяемых в ПСМ.
Уровень хранения данных в ПСМ построен на основе современной реляционной УБД. SCADA-с стема, на которой основано прикладное программное
обеспечен е ПСМ, а также СУБД имеют открытый форматы доступа к данным. труктура базы данных организована, используя встроенный открытый формат
базы данных SCADA-с стемы.
Обязанности персонала, о служивающего ПСМ
Для эксплуатац ПСМ предусмотрены две штатные единицы:
- |
адм н стратор; |
- |
оператор. |
Основными о язанностями администратора являются: |
|
- |
оценка ра отоспосо ности комплекса технических средств (серверов, ра- |
бочих станций); |
|
- |
оценка ра отоспосо ности программного обеспечения; |
- ведение учетных записей пользователей системы; |
|
- |
восстановление ра отоспособности ПСМ в случаях, указанных в п. 2.3.5 |
«Руководство пользователя». |
|
Администратор должен обладать высоким уровнем квалификации и прак- |
|
Основными обязанностями оператора являются: - просмотр текущих показаний датчиков;
- принятие решений на основе результатов работы ПСМ. Инженер-оператор должен иметь опыт работы с персональным
компьютером на уровне квалифицированного пользователя свободно осуществлять базовые операции.
Инженер-оператор должен обладать знаниями об исследуемых строительных конструкциях, необходимыми для того, чтобы правильно принимать решения, основанные на результатах работы ПСМ.
Надежность ПСМ
ПСМ должна сохранять работоспособность и обеспечивает восстановление своих функций при возникновении следующих внештатных ситуаций:
- при сбоях в системе электроснабжения аппаратной части, приводящих к перезагрузке операционной системы (ОС). Восстановление программы должно происходить после перезапуска ОС и запуска исполняемого файла ПСМ;
46
- при ошибках в работе аппаратных средств (кроме носителей данных и |
|
|
программ) восстановление работоспособности |
ПСМ возлагается |
на |
администратора ПСМ; |
|
|
- при ошибках, связанных с программным обеспечением (ОС и драйверы устройств), восстановление работоспособности ПСМ возлагается на администратора.
Для защиты аппаратуры от электрических и коммутационных помех должны применяются источники бесперебойного питания (ИБП).
Уровень хранения данных в ПСМ построен на основе современной реляционных УБД. Для обеспечения целостности данных используются встроенные
СибАДИВвод-вывод данных ПСМ, прием управляющих команд отображение результатов их исполнения выполняется в интерактивном режиме. нтерфейс соответствует современным эргономическим требованиям и обеспечивает удобный доступ к основным функциям и операциям ПСМ. Интерфейс рассчитан на преимущественное использование манипулятора типа «мышь».
механизмы СУБД.
ЭВМ, которая обеспечивает хранения данных, снабжена механизмом зерка-
лирован я жестк х д сков по технологии RAID.
Имеется возможность организации автоматического или ручного резервного
копирован я данных ПСМ встроенными средствами ОС и СУБД.
На ЭВМ, входящ х в ПСМ, не должны устанавливаться и функционировать программы, нарушающ е нормальное функционирование ПСМ. Контроль уста-
навливаемых программ возлагается на администратора.
Эргоном ка ПСМ
Взаимодейств е пользователей с прикладным программным обеспечением осуществляется посредством визуального графического интерфейса (GUI). Интер-
фейс ПСМ основан на мнемосхемах и встроенном интерфейсе SCADAсистемы.
Мнемосхема — совокупность сигнальных устройств и сигнальных изображений оборудования и внутренних связей контролируемого объекта, размещаемых на диспетчерских пультах, операторских панелях или выполненных на персональном компьютере. Информация, которая выводится на мнемосхему может быть представлена в виде аналогового, дискретного и релейного сигнала, а также гра-
фически.
На мнемосхемах отражается основное оборудование, сигналы, состояние регулирующих органов. Вспомогательный и справочный материал расположен в дополнительных формах отображения, с возможностями максимально быстрого
извлечения этих вспомогательных форм на экран.
Навигационные элементы выполнены в удобной для пользователя форме.
47
СибАДИВсе надписи экранных форм, а также сообщения, выдаваемые пользователю (кроме системных сообщений) выводятся на русском языке.
Защита информации от несанкционированного доступа
Компоненты подсистемы защиты от несанкционированных действий обеспечивают:
- идентификацию пользователя; - проверку полномочий пользователя;
- разграничение доступа пользователей на уровне задач информационных массивов.
Все средства защиты от несанкционированных действий построены на основе стандартных средств защиты от несанкционированных действий операционной системы и SCADA-системы.
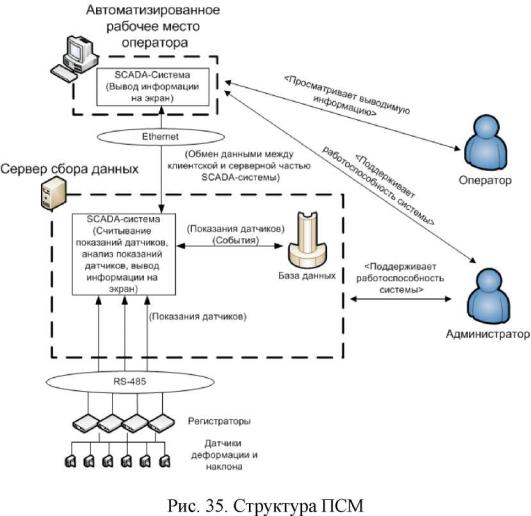
Техническая структура ПСМ
Техническая и организационная структура ПСМ проиллюстрирована на рис.
35.
48
В состав ПСМ входят следующие технические средства:
-измерительная аппаратура;
-сервер сбора данных;
-персональный компьютер (АРМ Оператора);
-система соединительных кабелей.
ЭВМ “Сервер сбора данных” (далее Сервер СМК или Сервер) осуществляет сбор показаний датчиков, связываясь с регистраторами по интерфейсу RS-485. Далее выполняется вычисление на их основе НДС конструкций, сравнение их с
СибАДИДатчики осуществляют непрерывного снятия контролируемых показателей, характеризующих НДС строительного объекта.
предельными значениями и вывод информации на экран. Хранение данных осуществляется в базе данных, работающей под управлением СУБД. Все прикладные задачи выполняются в рамках SCADA-системы.
ЭВМ “Автомат з рованное рабочее место оператора” (далее АРМ СМК или АРМ) предназначено для вывода оператору информации, сформированной Сервером. вязь с сервером осуществляется через локальную сеть Ethernet. Сетевое взаимодейств е осуществляется с помощью возможностей SCADAсистемы. Ра-
ботоспособность АРМ не влияет на работоспособность ПСМ.
В состав змер тельных каналов входят следующие устройства:
- |
датч ки деформации; |
- |
датч ки наклона; |
- |
датч ки температуры (встроены в датчики наклона и температуры); |
- |
рег страторы ли модули с ора и предобработки данных. |
Регистраторы о еспечивают преобразование аналоговых показаний датчиков в цифровые, осуществляют прео разование показаний датчиков в физическую величину, а также передачу показаний в сервер сбора данных.
Регистраторы соединяются с сервером сбора, хранения и обработки данных. Сервер и ПК АРМ оператора объединены в локальную сеть. При этом возможна интеграция в локальную сеть предприятия. ЭВМ «Сервер сбора данных» и ЭВМ “Ав-
томатизированное рабочее место оператора” соответствуют архитектуре IBM PC. Датчики, электронные блоки и ЭВМ соединяются между собой при помощи
соответствующих кабелей Ввиду того что на ЭВМ «Сервер сбора данных» предполагается хранение
всех данных, формируемых ПСМ, а также выполнение основных процессов системы, данная ЭВМ должна обладать техническими характеристиками, обеспечивающими отказоустойчивость надежность хранения данных, а именно механизмом зеркалирования жестк х дисков по технологии RAID.
Контроль достоверности показаний датчиков
Контроль достоверности показаний датчика осуществляется следующими способами:
1. Определение явного выхода за диапазон измерений. Отследить данную ситуацию возможно, поскольку диапазон измеряемой величины уже диапазона возможного значения, возвращаемого с регистратора. Выход за диапазон вероятнее всего означает неисправность датчика. Пользователь извещается об этом соответствующим сообщением.
49
2.Определение разности между текущим и предыдущим измерениями (при интервале опроса в 30 минут). В случае разницы, составляющей более одной трети шкалы, выводится предупреждение. Это расхождение принимается ошибочным, поскольку опыт эксплуатации систем показывает, что параметры систем изменяются значительно медленнее.
3. Отслеживание изменения показания в течение двенадцати часов. В случае отсутствия изменений делается вывод о том, что датчик неисправен и выводится соответствующее сообщение.
Конкретные сообщения, выводимые пользователю, приведены в разделе в СибАДИ«Руководстве по эксплуатации».
Датчики рег страторы
Первый вар ант комплектации:
1. Для змерен я деформаций используются струнные датчики модель VK-
4100 и датч ки наклона модель 6350 фирмы Geokon (www.geokon.com). Детальное описан е датч ков пр ведено в "Руководство по монтажу".
2. В качестве змерительного устройства применен 16 канальный реги-
стратор модель ЬС-2х16, также производства фирмы Geokon. Полное описание регистратора пр ведено на диске, в папке с наименованием «Geokon».
Второй вар ант комплектации:
1. Для змерен я деформаций используются струнные датчики модель ДД-
01 и датчики наклона модель ДН-01 предприятия ООО «НИИ Контрольприбор» (www.niikp-penza.ru). Детальное описание датчиков приведено в "Руководство по монтажу" .
2. В качестве измерительного устройства применен 6 канальный регистратор модель ПСД-С, также производства ООО «НИИ Контрольприбор.
Оборудование ЭВМ
Согласно приведенной на рис. 8 структуре ПСМ в нее входят две электрон- но-вычислительные машины. ЭВМ “Сервер сбора данных” должна обладать большей надежностью отказоустойчивостью, поэтому для нее рекомендуется промышленный персональный компьютер. ля повышения надежности хранения данных на ЭВМ “Сервер сбора данных” предусматривается избыточный дисковый массив (RAID). К ЭВМ “Автоматизированное рабочее место” отсутствуют жесткие требования, поэтому она собирается на базе обычного настольного ПК. Характеристики ЭВМ “Сервер сбора данных” приведены в табл. 5.
50
|
|
|
|
|
Табл. 5 |
||
|
|
Характеристики ЭВМ «Сервер сбора данных» |
|||||
|
|
Тип компьютера |
|
Промышленный ПК |
|
||
|
|
Процессор |
|
Двухядерный с тактовой частотой не менее 2,3 ГГ ц |
|
||
|
|
Оперативная память |
|
Не менее 4 Гб |
|
||
|
|
Жесткий диск |
|
Не менее 500 Гб (RAID 1) |
|
||
|
|
Видеокарта |
|
Объем видеопамяти не менее 64 Мб |
|
||
|
|
етевая карта |
|
Скорость обмена данными не менее 100 Мбит/c |
|
||
|
|
Порты ввода/вывода |
|
6 портов RS-485 |
|
||
|
|
Привод оптических дисков |
|
Обязателен |
|
||
Си |
бАДИ |
|
|||||
|
|
Монитор |
|
Диагональ экрана не менее 19 дюймов. Разрешение экрана не |
|
||
|
|
|
|
|
менее 1280x1024 |
|
|
|
|
Акуст ческая с стема |
|
Стерео |
|
||
|
|
Корпус |
|
Промышленный (мощность блока питания не менее 400 |
|
||
|
|
|
|
|
Вт) |
|
|
|
|
Характер ст ки ЭВМ «Автоматизированное рабочее место» приведены в |
|||||
табл. 6. |
|
Табл. 6 |
|||||
|
|
|
|
|
|||
|
|
Характер ст ки ЭВМ «Автоматизированное рабочее место» |
|||||
|
|
Т п компьютера |
|
|
Настольный ПК |
|
|
|
|
Процессор |
|
|
Двухядерный с тактовой частотой не менее 2 ГГ ц |
|
|
|
|
Операт вная память |
|
|
Не менее 2 Гб |
|
|
|
|
Жесткий диск |
|
|
Не менее 320 Гб |
|
|
|
|
Видеокарта |
|
|
Объем видеопамяти не менее 64 Мб |
|
|
|
|
Сетевая карта |
|
|
Скорость обмена данными не менее 100 Мбит/c |
|
|
|
|
|
|
|
Обязателен |
|
|
|
|
Привод оптических дисков |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Монитор |
|
Диагональ экрана не менее 19 дюймов. Разрешение экрана не |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
менее 1280x1024. |
|
|
|
|
Акустическая система |
|
|
Стерео |
|
|
|
|
Корпус |
|
|
Настольный (мощность блока питания не менее 400 Вт) |
|
|
Состав программного обеспечения ПСМ
Базовой программной платформой является операционная система MS Windows, поскольку данная операционная система имеет широкое распространение, хорошо документирована, используется в промышленных масштабах и обладает широким набором программного обеспечения.
Программное обеспечение ПСМ состоит из следующих компонентов: - операционная система для ЭВМ “Сервер сбора данных”;
- операционная система для ЭВМ “Автоматизированное рабочее место”; - система управления базами данных для ЭВМ “Сервер сбора данных”.
Предназначена для хранения архива ПСМ; - аппаратно-программные средства для выполнения функций системы мо-
ниторинга.
51
В состав аппаратно-программных средств для выполнения функций мониторинга входят следующие модули:
- модуль сбора и предобработки данных с измерительных каналов наклона, деформации и температуры (применяются встроенные функции регистраторов
Geokon);
- модуль формирования истории объекта. Взаимодействует с СУБД (применяется SCADA-система);
- модуль оценки НДС объекта (применяется SCADA-система);
- модуль автоматизированного рабочего места оператора. Предназначен для СибАДИвывода на экран информации о состоянии контролируемых строительных конст-
рукций результатов анализа данных. Применяется SCADA-система.
Операц онная с стема
В качестве операционной системы выбрана ОС Microsoft Windows XP Professional Service Pack 3 Russian (производство ООО “Майкрософт-Рус”), так как она обладает на большей совместимостью с оборудованием и программным обеспечим. На ЭВМ “Автомат зированное рабочее место” допускается применение ОС
Microsoft Windows 7 Professional Russian (производство ООО “Майкрософт-Рус”).
Сервер управлен я азой данных
В качестве СУБД вы ран сервер управления базами данных Microsoft SQL Server 2008 R2 Standard (производство ООО “Майкрософт-Рус”). Данная СУБД обладает всеми нео ходимыми средствами для ведения архивов ПСМ, имеет широкое распространение и открытые форматы доступа к данным. Имеет встроенную систему резервного копирования.
SCADA-система
SCADA (от англ. Supervisory Control And Data Acquisition - Диспетчерское управление и сбор данных) — данное понятие обычно применяется к системе управления в промышленности: система контроля и управления процессом с применением ЭВМ.
В ПСМ SCADA-система решает ряд задач:
- обмен данными с ЭВМ в реальном времени. - обработка информации в реальном времени.
- отображение информации на экране монитора в удобной понятной для человека форме.
- ведение базы данных. Взаимодействует с СУБД.
-аварийная сигнализация и управление тревожными сообщениями.
-осуществление сетевого взаимодействия между Сервером и АРМ. MasterSCADA является полнофункциональным SCADA модульным
пакетом программ с расширяемой функциональностью. Пакет построен на кли- ент-серверной архитектуре с возможностью функционирования в локальных сетях. Открытые описания интерфейсов и форматов данных обеспечивают все необходимые возможности для стыковки с внешними программами и системами.
52
ПО MasterSCADA версии 3.2 разработано фирмой ЗАО «ИнСАТ» (г. Москва) в 2010 году. Более подробная информация о возможностях ПО MasterSCADA приведена в Руководстве пользователя (раздел 2).
Особенности реализации прикладных модулей в SCADA-системе
Вся логика управления, взаимодействия с устройствами, расчетов, а также интерфейса пользователя реализована в рамках проекта MasterSCADA «BalakovoAES» (далее Проекта).
Наблюдаемое здание, его строительные конструкции представлены в виде СибАДИиерархии объектов MasterSCADA. Подробнее представлено ниже.
Вза модейств е с регистраторами Geokon реализовано в скриптах на языке C#. Данные скр пты являются составной частью Проекта и исполняются в среде
MasterSCADA.
Интерфейс пользователя реализован в мнемосхемах MasterSCADA. На них графически зображаются чертежи планов, разрезов, колонн и стержней здания с обозначенными местами контроля. Все показания датчиков выводятся на соответствующ х мнемосхемах. Подро нее об этом в «Руководство пользователя» (п. 1.2.1
и п. 1.2.3).
ПСМ позволяет вести анализ исторических данных благодаря системе трендов MasterSCADA. Подро нее об этом в «Руководство пользователя» (п. 2.3.3).
Уведомлен е пользователя о превышении предельных значений НДС конструкции осуществляется при помощи системы сообщений MasterSCADA. Подробнее об этом в «Руководстве пользователя» (п. 2.3.1 и п. 2.3.3).
В Проекте также реализовано отображение схемы оборудования с выводом информации о регистраторах и датчиках.
Все измеряемые параметры, а также события архивируются в базу данных. Используется встроенная система архивирования MasterSCADA.
Защита от НСД реализована встроенными средствами MasterSCADA. В рамках проекта определены должности “ дминистратор” и “Оператор”. Имеется возможность задания паролей для входа. Подробнее об этом в «Руководство по монтажу» (п. 2.7).
Структура Проекта MasterSCADA
Как уже было отмечено ранее, в MasterSCADA применен объектный подход. Проект MasterSCADA имеет иерархическую структуру объектов.
Интегрированная среда MasterSCADA предназначена для создания управления проектами MasterSCADA. Пользовательский интерфейс MasterSCADA построен на идеологии «все в одном». Все модули расширения встроены в общую оболочку. Пользователь всегда работает с простым единым внешним видом программы, состоящим из древовидного проекта, палитры библиотечных элементов и окна редактирования документов и свойств. Документ MasterSCADA - способ отображения характеристик и состояния объекта. Документами являются мнемосхемы, журналы, тренды, текстовые файлы и т.д. В
53
ПСМ используются преимущественно мнемосхемы, журналы и тренды.
Проект состоит из двух разделов: «Система» и «Объект». Раздел «Система» описывает техническую структуру реализуемой системы. В ней определяются Компьютеры системы (в нашем случае Сервер сбора данных и АРМ), а также связи с БД (в нашем случае MSSQL-коннектор, присоединенный к Серверу).
Раздел «Объект» описывает иерархическую структуру наблюдаемого объекта. В иерархическом виде представлены элементы строительных конструкций МЗ, а также элементы оборудования системы мониторинга. Типы объектов пред-
СибАДИ |
||||
ставлены в табл. 7. |
|
Табл. 7 |
||
|
|
|
Типы объектов |
|
|
Тип объекта |
Т п род тельского |
Описание объекта |
Документы объекта |
|
|
объекта |
|
|
|
Балаковская |
|
Корневой узел иерархии |
Мнемосхема (стартовая |
|
АЭС |
|
|
для системы), журнал |
|
Конструкц я |
Балаковская АЭС |
Корневой узел куста, описы- |
Мнемосхема, Журнал, |
|
вающего элементы конструкции |
Тренд |
||
|
|
|
здания |
|
|
Планы- |
Конструкция |
Корневой узел куста, описыва- |
Мнемосхема, Журнал, |
|
Разрезы |
|
ющего планы разрезы здания |
Тренд |
|
|
|
Корневой узел куста, описыва- |
|
|
Разрез |
Планы-разрезы |
ющего разрез чертежа здания, с |
Мнемосхема, Журнал, |
|
указанием контролируемых эле- |
Тренд |
||
|
|
|
||
|
|
|
ментов конструкции |
|
|
|
|
Корневой узел куста, описы- |
Мнемосхема, Журнал, |
|
План |
Планы-разрезы |
вающего план чертежа здания, с |
|
|
указанием контролируемых эле- |
Тренд |
||
|
|
|
||
|
|
|
ментов консттрукций |
|
|
Колонна |
Разрез, план |
Объект, описывающий располо- |
Мнемосхема, Журнал, |
|
жение датчиков на определенной |
Тренд |
||
|
|
|
колонне |
|
|
Стержень |
|
|
Мнемосхема, Журнал, |
|
Разрез |
Объект, описывающий располо- |
Тренд |
|
|
фермы |
жение датчиков на определенном |
|
|
|
|
|
||
|
|
|
стержне фермы покрытия |
|
|
|
|
|
Журнал, Тренд |
|
|
|
Объект, описывающий датчик де- |
|
|
Датчик |
Колонна, Стержень |
формации, расположенный на эле- |
|
|
менте конструкции. Содержит не- |
|
||
|
деформации |
фермы |
|
|
|
обходимые параметры для вычис- |
|
||
|
|
|
|
|
|
|
|
ления НДС, а также для контроля |
|
|
|
|
предельных значений |
|
|
|
|
|
Журнал, Тренд |
|
Датчик |
|
Объект, описывающий датчик на- |
|
|
Колонна |
клона, расположенный на элементе |
|
|
|
наклона |
конструкции. Содержит необхо- |
|
|
|
|
|
||
|
|
|
димые параметры для вычисления |
|
|
|
|
наклона, а также для контроля |
|
54

|
|
Тип объекта |
Тип родительского |
Описание объекта |
|
Документы объекта |
|
|
|
объекта |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
предельных значений |
|
|
|
|
|
Оборудование |
Балаковская АЭС |
Корневой узел куста, описываю- |
|
Мнемосхема, |
|
|
|
|
|
щего оборудование системы мони- |
|
Журнал |
|
|
|
|
|
торинга |
|
|
|
|
|
Магистрали |
Оборудование |
Корневой узел куста, описыва- |
|
Мнемосхема, |
|
|
|
|
|
ющего магистрали обмена данными |
|
Журнал |
|
|
|
|
|
по протоколу RS-485 |
|
|
|
|
|
Магистраль |
Магистрали |
Корневой узел куста, одну магист- |
|
Мнемосхема, |
|
|
|
|
|
раль RS-485 c указанием регистра- |
|
Журнал |
|
|
|
|
|
торов, подключенных к этой маги- |
|
|
|
|
|
|
|
страли |
|
|
|
|
|
Регистратор |
Маг страль |
|
|
Мнемосхема, |
|
|
|
|
|
Объект, описывающий регистра- |
|
Журнал |
|
|
|
|
|
тор. Выводит на экран состояние |
|
|
|
|
|
|
|
регистра тора, а также сигнализи- |
|
|
|
|
|
|
|
рует о неисправностях |
|
|
|
|
|
Датч к |
Маг страль |
О ъект, предназначенный для вы- |
|
Мнемосхема |
|
|
|
|
|
вода информации о характеристи- |
|
|
|
|
|
|
|
ках датчика |
|
|
|
|
|
СибАДИ |
|
|
|
||
|
|
|
|||||
MasterSCADA меет встроенные средства для навигации по дереву объектов в режиме сполнен я. Подро ная информация приведена в п. 2.3 «Руководства пользователя».
8. ПОДСИСТЕМА ДИН МИЧЕСКОГО МОНИТОРИНГА
Подсистема динамического мониторинга СМ БалАЭС1 (далее ПДМ) предназначена для мониторинга динамического параметров строительных конструкций МЗ Энергоблока №1 Балаковской ЭС. Объектами мониторинга являются ускорение колебаний фундамента турбоагрегата, а также динамические характеристики каркаса здания согласно РБ-045-08 п. 3.3. Источником информации для ПДМ являются показания датчиков ускорения, размещенные на строительных конструкциях.
Функции, выполняемые подсистемой
Подсистема выполняет следующие функции:
1)Сбор показаний с акселерометров.
2)Определение собственных частот колебаний и форм деформа-
ции.
3)Хранение данных измерений.
Перечень подсистем, их назначение и основные характеристики
55
В состав ПДМ входят подсистемы, приведенные в табл. 8.
|
|
|
|
Табл. 8 |
|
Подсистемы системы динамического мониторинга |
|||
|
Название |
Назначение |
Функции |
Реализация |
|
Подсистема сбора дан- |
Сбор показаний датчиков, |
|
Аппаратная |
|
ных |
расположенных на эле- |
Первичная обработка по- |
|
|
|
ментах строительных кон- |
казаний датчиков, заклю- |
|
|
|
струкций с целью их об- |
чающаяся в их фильтра- |
|
|
|
работки |
ции и масштабировании |
|
|
СибАДИ |
Аппаратная, про- |
||
|
|
|
|
|
|
|
|
|
граммная (на базе |
|
|
|
Периодическое снятие |
ЭВМ) |
|
|
|
показаний датчиков, рас- |
|
|
|
|
положенных на строи- |
|
|
|
|
тельных конструкциях |
|
|
|
|
Передача показаний дат- |
Программная (на базе |
|
|
|
ЭВМ) |
|
|
|
|
чиков в подсистемы хра- |
|
|
|
|
нения, анализа и визуали- |
|
|
|
|
зации данных |
|
|
Подсистема обработки |
Определение текущего |
|
Программная |
|
анал за данных |
состояния НДС строи- |
Определение амплитуд и |
(Artemis |
|
|
тельных конструкций |
собственных частот ко- |
Extractor) |
|
|
здания |
лебаний |
|
|
|
|
Оценка достоверности |
Программная (на базе |
|
|
|
показаний датчиков |
ЭВМ) |
|
|
|
|
|
|
Подсистема хранения |
Хранение данных измере- |
Хранение данных изме- |
Программная (на базе |
|
данных |
ний |
рений |
ЭВМ) |
Информационное обеспечение
Входящие в состав ПДМ подсистемы в процессе функционирования ведут обмен информацией на основе открытых форматов обмена данными, используя для этого входящие в их состав модули информационного взаимодействия. Все форматы данных приведены в соответствующей документации, поставляемой сторонними производителями.
В состав передаваемых данных входят:
- |
данные показаний акселерометров; |
- |
данные об амплитудах собственных частотах колебаний строительных |
конструкций.
Программное обеспечение ПДМ имеет открытый формат доступа к данным.
Роли персонала ПДМ
Администратор и оператор выполняют те же задачи, что и в подсистеме статического мониторинга.
Надежность ПДМ и эргономика
Аналогичны, подсистеме статического мониторинга.
56
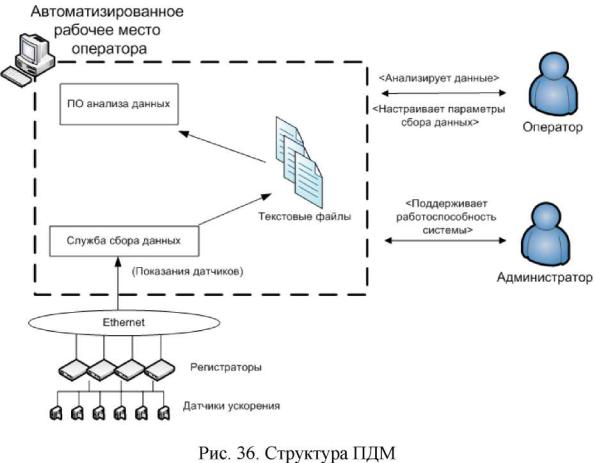
Техническая и организационная структура ПДМ
Техническая и организационная структура ПДМ показана на рис. 36. В состав ПДМ входят следующие технические средства:
-трехкоординатные акселерометры и сейсметры фирмы «REF TEK»;
-персональный компьютер (АРМ Оператора);
-система соединительных кабелей.
СибАДИЭВМ “Автоматизированное рабочее место оператора” (далее АРМ СМК или АРМ) осуществляет сбор показаний датчиков, связываясь с регистраторами по каналу Ethernet. Хранение данных осуществляется в бинарных файлах, формируемых службой сбора данных. Анализ данных ведется оператором вручную при помощи специализированного ПО.
В состав измерительной аппаратуры входят следующие компоненты: - датчики ускорения; - регистраторы сбора (сейсмостанции) предобработки данных:
Датчики осуществляют измерение колебаний конструкций в заданных точках здания.
Регистраторы обеспечивают преобразование аналоговых показаний датчиков в цифровые, осуществляют преобразование показаний датчиков в физическую величину, а также передачу показаний в АРМ. Регистраторы соединяются с ЭВМ АРМ.
ЭВМ “Автоматизированное рабочее место оператора” соответствует архитектуре IBM PC.
57
Датчики, регистраторы, блоки питания и ЭВМ соединяются между собой при помощи соответствующих кабелей.
Датчики и регистраторы
В проект заложены шести и трехканальные сейсмометры (регистраторы)
производства RefTek (USA) - RefTek 130 и RefTek130B-01 соответственно. Ука-
занные сейсмометры обладают следующими особенностями:
1) 24-разрядный АЦП для каждого измерительного канала (аналого
цифровой преобразователь), что позволяет преобразовывать сигналы с высокой точностью (динамический диапазон > 140дБ).
СибАДИменение высокочувствительного оборудования RefTek позволит измерять динамические характеристики несущих строительных конструкций без искусственного возбуждения колебаний конструкций.
2) На большая частота опроса 1000 Г ц.
3) Возможность подключения одно или двух трехкомпонентных акселерометров.
4) Нал ч е Ethernet-порта (применяется для управления регистратором, а также передачи данных измерений).
5) Нал ч е Serial-порта для связи с компьютером через RS 232 (пр меняется при конфигурировании регистраторов).
6) Нал ч е GPS-порта для подключения GPS модуля, который
обеспеч вает определение координат сейсмометра а также устанавливает точное (как на спутниках GSM) время.
7) |
Нал ч е служ ы времени, что гарантирует синхронизацию всех |
сейсмометров системы по времени (необходимое условия при проведении |
|
модального анализа). |
|
8) |
Наличие двух слотов для флэш-накопителей (каждый по 2 Гб). |
9) |
Напряжение питания 10-16 В. |
10) |
Ра очий диапазон температур -20 0С + 60 0С. |
11) |
Г ерметичное исполнение корпуса регистратора не ниже IP66. |
В проект ПДМ заложены также трехкомпонентные акселерометры RefTek |
|
131A-02/3, основными характеристиками которых являются: |
|
1) |
Диапазон измерений ± 3,5 g (131 дБ). |
2) |
Собственные шумы 200 нg2/Г ц. |
3) |
Частота собственных колебаний > 500 Г ц. |
4) |
Линейность < 0,05% от полного диапазона. |
5) |
Рабочий диапазон температур -20 0 + 60 0С. |
6) |
Герметичное исполнение корпуса датчика не ниже IP66. При- |
Более подробная информация об оборудовании RefTek приведена в документах, прилагаемых на компакт-диске.
Оборудование ЭВМ
Согласно приведенной на рис. 36 структуре ПДМ, в ее состав входит одна электронно-вычислительная машина.
58

Ввиду того что на ЭВМ «Автоматизированное рабочее место оператора» предполагается хранение всех данных, формируемых ПДМ, а также выполнение основных процессов системы, данная ЭВМ должна обладать техническими характеристиками, обеспечивающими отказоустойчивость и надежность хранения данных, а именно механизмом зеркалирования жестких дисков по технологии RAID. Характеристики ЭВМ “Автоматизированное рабочее место” приведены в табл. 9.
|
|
Табл. 9 |
СибАДИ |
||
|
Характеристики ЭВМ «Автоматизированное рабочее место» |
|
|
Т п компьютера |
Настольный ПК |
|
Процессор |
Двуядерный с тактовой частотой не менее 2 ГГ ц |
|
Операт вная память |
Не менее 2 Гб |
|
Жестк й д ск |
Не менее 500 Гб (RAID 1) |
|
В деокарта |
Объем видеопамяти не менее 64 Мб |
|
етевая карта |
Скорость обмена данными не менее 100 Мбит/c |
|
Привод опт ческ х д сков |
Обязателен |
|
Мон тор |
Диагональ экрана не менее 19 дюймов. Разрешение экрана не менее |
|
|
1280x1024. |
|
Акуст ческая с стема |
Стерео. |
|
Корпус |
Настольный (мощность блока питания не менее 400 Вт) |
Состав программного о еспечения ПДМ
Базовой программной платформой является операционная система MS Windows, поскольку данная операционная система имеет широкое распространение, хорошо документирована, используется в промышленных масштабах обладает широким набором программного обеспечения.
Программное обеспечение ПДМ состоит из следующих компонентов:
- |
операционная система для ЭВМ “ втоматизированное рабочее место”; |
- |
ПО сбора данных с акселерометров. Применяется ПО, поставляемое про- |
изводителем регистраторов.
- ПО спектрального анализа сигналов вибрационного наблюдения.
В качестве операционной системы выбрана ОС Microsoft Windows XP Professional Service Pack 3 Russian (производство ООО “Майкрософт-Рус”). Выбор данной ОС обусловлен совместимостью с прикладным программным обеспечением ПДМ.
Программное обеспечение сбора данных с регистраторов
Для управления сетью регистраторов RefTek а также сбора данных с сейсмометров применяется программа RTPD.
RTPD - это программа, которая работает на ЭВМ ПДМ в виде сервиса операционной системы Windows. RTPD обеспечивает связь с сейсмометрами через Ethernet. При этом RTPD выполняет коррекцию ошибок.
RTPD использует RefTek protocol (RTP) протокол, работающий поверх UDP протокола. RTP-протокол поддерживается всеми сейсмометрами семейства RefTek 130.
59
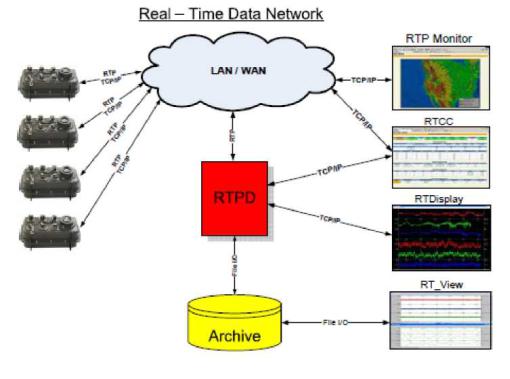
RTPD принимает пакеты с данными от сейсмометров и сохраняет принятые пакеты в архив. RTPD, являясь сервером, позволяет одновременное подключение нескольких клиентов как показано на рис. 37.
.
СибАДИРис. 37. Схема потока данных RTPD
Для ПДМ в составе клиентов RTPD необходимо использовать RTCC (RefTek command and control), утилиту управления контроля сетью сейсмометров.
В работе ПДМ применяются утилиты архива для извлечения и дальнейшего анализа собранных сейсмометрами данных.
Инструкция по установке программного обеспечение RefTek приведена в Руководстве по монтажу.
Инструкция по применению программного обеспечение RefTek приведена в Руководстве пользователя.
60
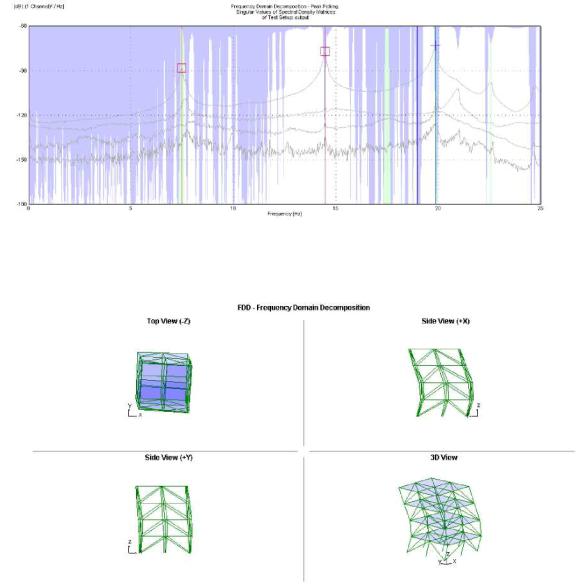
СибАДИРис. 38. Окно программы ARTeMIS Extractor
Программное обеспечение модального анализа сигналов вибрационного наблюдения
Для проведения модального анализа по результатам измерений колебания конструкций используется ARTeMIS Extractor, который не требует сведений о природе силового воздействия. Окно программы с изображением конструкции (в качестве наглядного примера приведен каркас здания) и расположенными на ней датчиками показано на рис. 38.
В результате модального анализа из данных измерений извлекаются динамические характеристики конструкции - собственные частоты колебаний, формы деформации коэффициенты демпфирования.
На основе полученного спектра собственных частот колебаний (рис. 39) и величин коэффициента демпфирования (рис. 40) делается заключение об изменении состояния конструкции.
61
СибАДИР с. 39. Спектр собственных частот колебаний конструкции
Рис. 40. Форма колебаний конструкции с соответствующей частотой коэффициентом демпфирования
62
СПИСОК ЛИТЕРАТУРЫ
1. РД ЭО 0447–02. Методика оценки состояния и остаточного ресурса железобетонных конструкций АЭС, важных для безопасности. Концерн «РОСЭНЕРГОАТОМ», 2002.
2. РД ЭО 0462–03. Методика по обоснованию срока службы строительных конструкций, зданий и сооружений атомных станций с РМБК. Концерн «РОСЭНЕРГОАТОМ», 2003.
3. РД ЭО 0538–2004. Методика по обоснованию срока службы защитных оболочек СибАДИатомных электростанций с ВВЭР-1000. Концерн «РОСЭНЕРГОАТОМ», 2004.
4. РБ-045–08. Д нам ческий мониторинг строительных конструкций объектов использован я атомной энергии. Федеральная служба по экологическому, технологическому и атомному надзору. – М., 2008.
5. РД ЭО 0624–2005. Мониторинг строительных конструкций АЭС. Концерн «РОСЭНЕРГОАТОМ», 2005.
6. Федеральный закон N 384-ФЗ "Технический регламент о безопасности зданий и сооружен й". – М., 2009.
7. ГОСТ Р 22.1.12–2005. Безопасность в чрезвычайных ситуациях. Структурированная с стема мон тор нга и управления инженерными системами зданий и сооружений. Общ е требован я. – М., 2005.
8. Yanev B. Past Experience and Future Needs for Bridge Monitoring in New York City, 6th International Workshop on Material Properties and Design, Present and Future of Health Monitoring, Bauhaus University, Sept. 2000, pp 93 . 108, AEDIFICATIO Publishers.
9. Santa U., Bergmeister K., Strauss A. Guaranteeing Structural Service Life Through Monitoring, 1st fib congress in Osaka 13-19 October 2002, Japan.
10. Young J., Haugse E., Davis C. Structural Health Management an Evolution in Design. Proceedings of the 7th International Workshop on Structural Health Monitoring. Edited by Fu-Kuo Chang, Stanford University, September 9-11, 2009, Vol. 1, 2009, pp. 3-14.
11.Maeck J., Abdel Wahab M., Peeters B., De Roeck G., Visscher J.D., De Wilde W.P., Ndambi. J.-M., Vantomme J. Damage identification in reinforced concrete structures by dynamic stiffnes determination. Engineering Structures 22, Elsevier Science Ltd., 2000, pp. 1339-1349.
12.Коренев Б. Г., Рабинович . М. Справочник по динамике сооружений. М., 1972.
13. Wenzel H. Quality Assesment and Damage Detection by Monitoring, http://www.vce.at. 14. Williams C. Testing of large structures using vibration techniques. Structural Integrity
Assesment, Elsevier Applied Science, London UK, 1992, pp. 190-229.
15. Taskov L.A. Dynamic testing of bridge structures applying forced and ambient vibration methods. Proc. Conf. On Civil Engineering Dynamics, Society for Earthquakes and Civil Engineering Dynamics, London, UK, 1988, papers 6.
16.Bendat J.S., Piersol A.G. Engineering applications of correlation and spectral analysis, John Wiley, New York USA, 1980.
17.Grosse C.U., Finck F., Kurz J., Reinhard H.-W. Monitoring Techniques Based on Wireles AE Sensors for Large Structures in Civil Engineering. Proc. EWGAE 2004 symposium in Berlin, DGZfP: Berlin, BB90, 2004, pp. 843-856.
18.Doebling S.W., Farrar C.R., Prime M.B., Shevitz D.W. Damage identification and health monitoring of structural and mechanical system from changes in their vibration characteristics: a literature review. Report No. LA-13070-MS, Los Alamos National Laboratory, Los Alamos, NV, 1996.
63
19. Нестеров, П.В. Автоматизированный мониторинг строительного объекта с использованием «скрытой избыточности» в сети датчиков. Информатика и вычислительная техника : сборник научных трудов / под ред. В. Н. Негоды. – Ульяновск: УлГТУ, 2010. – 677 с.
20. Нестеров, П.В. Корреляционный анализ показаний датчиков системы мониторинга строительного объекта. Современные методы и средства обработки пространст- венно-временных сигналов: сборник научных трудов конференции / П.В. Нестеров, А.А. Живаев – Пенза : ПДЗ, 2010.
СибАДИ21. Boldyrev G.G., Valeyev D., Idrisov I., Krasnov G. A System for Static Monitoring of Sports Center Structures. Proceedings of the 7th International. Workshop Structural Health Monitoring. Editor Fu-Kuo Chang, Stanford Univesity, Vol. 1, 2009, pp. 374–382.
64