

3. ОБРАБОТКА ВЕДОМОСТЕЙ ВЫЧИСЛЕНИЯ КООРДИНАТ ВЕРШИН ТЕОДОЛИТНОГО ХОДА
Обработка замкнутого теодолитного хода ведется в специальной ведомости (табл. 4).
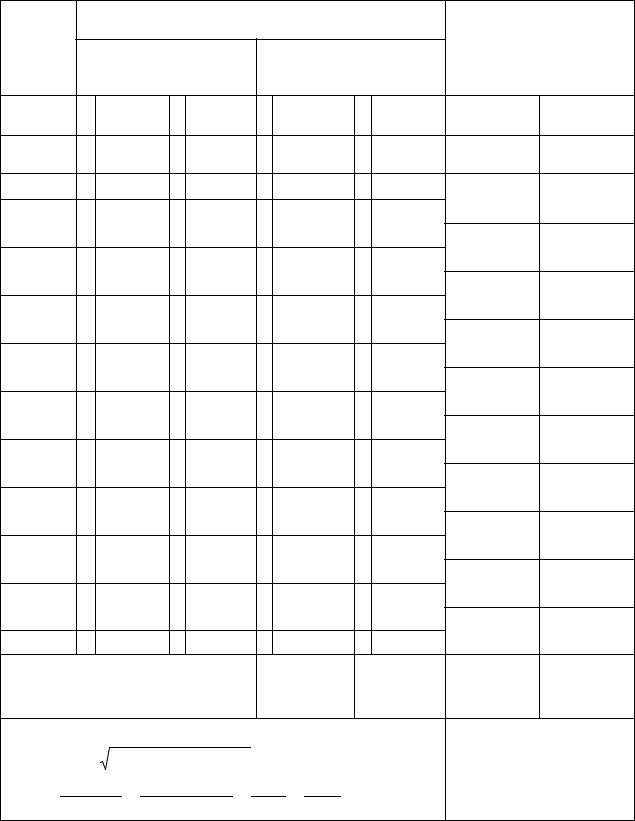
Таблица 4
Ведомость вычисления прямоугольных координат вершин теодолитного хода
|
|
Измерен- |
|
Исправ- |
|
Дирекци- |
|
|
|
||
Номера точек |
|
ные |
|
ленные |
|
онные |
|
Румбы ri |
|
||
|
углы βi |
углы βиспр |
|
углы αi |
|
|
|
||||
O |
′ ″ |
O |
′ |
″ |
O |
′ ″ |
назв. |
O |
′ ″ |
||
|
|||||||||||
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
- |
|
|
|
|
- |
|
|
И |
|
|
|
|
|
|
|
218 36 11 |
ЮЗ |
34 21 49 |
|||
|
|
|
|
|
|
|
|
||||
4 |
27 01 37 |
|
27 01 23 |
|
|||||||
|
|
|
|
|
|||||||
|
|
11 34 48 |
СВ |
11 33 48 |
|||||||
|
|
|
|
|
|
|
|
||||
|
247 32 22 |
|
247 32 08 |
|
|||||||
|
|
|
|
|
|
||||||
|
|
|
А |
СЗ |
|
||||||
|
|
|
|
|
|
|
|
|
304 02 40 |
55 57 20 |
|
|
225 48 47 |
|
225 48 33 |
|
|||||||
|
|
|
|
|
|
||||||
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
б |
|
|
||
|
|
|
|
|
|
|
|
|
258 14 07ДСЗ |
78 14 07 |
|
|
101 16 25 |
|
101 16 12 |
|
|||||||
|
|
|
336 57 55 |
СЗ |
23 02 05 |
||||||
|
|
|
|
|
|
|
|
|
|||
|
121 46 48 |
|
121 46 35 |
|
|||||||
|
|
|
|
|
|
||||||
|
|
|
|
|
|
||||||
|
|
С |
|
|
35 11 20 |
СВ |
35 11 20 |
||||
|
135 33 44 |
|
135 33 31 |
|
|||||||
|
|
|
|
|
|
||||||
|
|
|
|
|
|
||||||
|
|
|
|
|
и |
79 37 49 |
СВ |
79 37 49 |
|||
|
|
|
|
|
|
|
|||||
|
157 27 18 |
|
157 27 05 |
|
|
|
|
||||
|
|
|
102 10 44 |
ЮВ |
77 49 16 |
||||||
|
|
|
|
|
|
|
|
|
|||
|
106 47 24 |
|
106 47 11 |
|
|||||||
|
|
|
|
|
|
||||||
|
|
|
175 23 33 |
ЮВ |
4 36 27 |
||||||
|
|
|
|
|
|
|
|
|
|||
3 |
136 47 35 |
|
136 47 22 |
|
|||||||
|
|
|
|
|
|||||||
|
|
218 36 11 |
ЮЗ |
18 36 11 |
|||||||
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|||
4 |
|
- |
|
|
|
|
- |
|
|||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Σβпр =1260°02′ |
|
|
|
|
|
|
|
|
|
||
[βтеор ]=1260°00′ |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|||
fβ = 2 |
′ |
′ |
|
|
′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
fβ доп = ±1 |
|
9 = ±3 |
|
|
|
|
|
|||
7
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Окончание табл. 4 |
|||
Гори- |
|
|
|
|
Приращения координат, м |
|
Координаты, м |
||||||||||||
зон- |
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
тальное |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
проло- |
вычисленные |
|
|
|
|
исправленные |
|
|
|
|
|
||||||||
жение |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d, м |
|
|
x |
|
y |
|
|
|
|
x |
|
|
y |
|
|
x |
|
y |
|
|
7 |
|
|
9 |
0 |
11 |
|
2 |
|
|
13 |
|
4 |
15 |
|
16 |
|
17 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
569,576 |
|
917,879 |
|
|
159,281 |
124,476 |
|
99,379 |
|
124,476 |
|
|
99,379 |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
445,100 |
|
818,500 |
|
|
68,74 |
|
67,341 |
|
13,799 |
|
67,352 |
|
|
13,814 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
512,452 |
|
832,314 |
|
|
64,03 |
|
35,846 |
|
53,055 |
|
35,856 |
|
|
53,042 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
548,308 |
|
779,272 |
|
|
80,66 |
|
16,446 |
|
78,966 |
|
16,436 |
|
|
78,949 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
И |
|
|
700,323 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
531,874 |
|
|
||
94,84 |
|
87,278 |
|
37,110 |
|
87,293 |
|
|
37,090 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
Д |
619,167 |
|
663,233 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
78,24 |
|
63,942 |
|
45,088 |
|
63,954 |
|
|
45,105 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
А |
|
683,121 |
|
708,338 |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
100,44 |
|
18,079 |
|
98,799 |
|
18,094 |
|
|
98,821 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
б |
|
|
|
701,215 |
|
807,159 |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
104,18 |
|
21,978 |
|
101.835 |
|
21,962 |
|
|
101,857 |
|
|
|
|
|
|||||
|
|
|
|
|
и |
|
|
|
|
|
|
679,253 |
|
909,016 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
110,05 |
|
109,694 |
|
8.84 |
|
|
109,677 |
|
|
8,863 |
|
|
|
|
|
||||
|
|
|
|
С |
|
|
|
|
|
|
|
|
569,576 |
|
917,879 |
|
|||
|
Σ = 701,18 |
|
|
|
|
|
Σ = 0 |
|
|
Σ = 0 |
Σ∆xтеор = |
|
Σ∆yтеор = |
|
|||||
|
|
|
|
|
|
|
|
= x83 |
− x84 |
= 0 |
= x83 − x84 |
= 0 |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
Σ∆xпр = f∆x = 0,108 Σ∆yпр = f∆y = 0,149 |
|
|
|
|
|
|
|
|||||||||||
|
fабс = |
(−0,108)2 +(−0,149)2 |
= 0,184 |
|
|
|
|
|
|
|
|
|
|||||||
fотн = |
1 |
|
= |
|
1 |
|
≈ |
1 |
|
< |
1 |
|
|
|
|
|
|
|
|
|
Σd / fабс |
|
701,18/ 0,184 |
|
3811 |
|
2000 |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
8 |
|
|
|
|
|
|
|
|
В графе 4 записывают исходный дирекционный угол начальной стороны α83-84 и исходный дирекционный угол конечной стороны, а так как полигон замкнутый, то дирекционный угол конечной стороны равен дирекционному углу начальной стороны α83-84.
Исходные дирекционные углы выделены жирным шрифтом. Для рассматриваемого примера α83-84=218º26′11″. Студент берёт исходные данные своего варианта. Просуммируем все измеренные
углы и получим практическую сумму углов
зонтальных углов, разность между ними называют угловой невязкой.
|
|
n |
βизм , |
|
|
|
|
|
|
|
∑ |
|
|
|
|
||
|
|
i-1 |
|
|
|
|
|
|
где n – число измеренных углов в ходе. |
|
|
|
|
|
|||
|
|
|
n |
βизм =1260º02′. |
||||
Для рассматриваемого примера ∑ |
||||||||
|
|
|
i-1 |
|
|
|
|
|
Затем находим теоретическое значение суммы углов. В замкну- |
||||||||
том полигоне она подсчитывается как |
|
И |
|
|||||
|
|
|
|
|
|
|||
|
[βтеор ]=180° (n −2), |
|
|
|
||||
где n – количество углов в полигоне. |
Д |
|
|
|
||||
Для рассматриваемого примера [β |
|
]=1260 |
|
|
′ |
|||
|
|
00 . |
||||||
|
|
Атеор |
|
|
|
|
||
Вследствие ош бок змерений углов практическая сумма изме- |
||||||||
|
б |
|
|
|
|
|
|
|
ренных горизонтальных углов не равна теоретической сумме гори- |
||||||||
и |
|
|
|
|
|
|
|
|
С |
|
|
|
|
|
|
|
|
Вычисляется угловая невязка хода. Разница между ∑βизм и [βтеор]
и составляет угловую невязку в теодолитном ходе.
fβпрак = ∑βпр −[βтеор ].
В нашем примере fβпрак = 2′.
Полученную невязку сравнивают с допустимой, которая вычисляется по формуле
9

fβдоп = ±2t
 n,
n,
где t – точность прибора (у нас t = 30′); n – число измеренных углов. В нашем примере fβдоп = ±1′ 
 9 = ±3′.
9 = ±3′.
Если выполняется неравенство fβ прак ≤ fβдоп , то fβ прак делят на количество углов и получают величину поправки, которую вводят в
каждый измеренный горизонтальный угол с обратным знаком:
|
|
|
Vβ |
= − |
fβ |
. |
|
|
|
|
n |
|
|||
|
|
|
|
|
|
|
|
Поправки вычисляются до целых секунд. Должно выполняться |
|||||||
равенство |
|
|
∑V = − fβ . |
И |
|||
|
|
|
|||||
|
|
|
|
||||
К измеренным углам прибавляют поправку со своим знаком, ре- |
|||||||
зультат записывают в графу 3. |
|
= βД+V . |
|||||
|
|
б |
|||||
|
|
β |
испр |
||||
|
и |
|
|
|
|
|
|
Контролем прав льностиАисправления углов служит равенство |
|||||||
∑βиспр = [βтеор ]. |
|
|
|
|
|
|
|
С |
|
|
|
|
|
|
|
После уравн ван я углов вычисляют дирекционные углы всех сторон хода по формуле
αn+1 =αn +180°− βиспр.
Дирекционный угол последующей стороны равен дирекционному углу предыдущей стороны плюс 180º и минус правый (исправленный) угол хода, образованный этими сторонами.
Пример:
α84−1 =α83−84 +180°− β84 = 218°36′11′′+180°−27°01′23′′ = = 371°34′48′−360° =11°34′48′′.
Для нашего хода вычисления ведут в следующей последовательности:
10
α1−2 =α84−1 +180°− β1;
α2−3 =α1−2 +180°− β2 ;
α3−4 =α2−3 +180°− β3;
α83−84 =α7−83 +180°− β83 .
Вычисленный α83−84 должен быть точно равен исходному α83−84 . Результаты вычислений записывают в графу «Дирекционные
углы».
Если при вычислении дирекционный угол получается отрицательным, то кроме 180º к дирекционному углу предыдущей стороны необходимо прибавить 360º. Если дирекционный угол получается
больше 360º, то из него вычитают 360º. |
И |
|
|||||
Производят уравнивание линейных измерений. Обработка ли- |
|||||||
нейных измерений начинается |
с вычисления периметра хода |
||||||
n−1 |
|
|
|
|
Д |
|
|
P = ∑di . |
|
|
|
|
|
|
|
i=1 |
|
|
|
|
|
|
|
Вычисление приращений координат для всех сторон теодолит- |
|||||||
|
|
|
А |
|
|
||
ного хода выполняют по формулам: |
|
|
|
||||
|
|
б |
|
|
|
|
|
|
|
|
∆х = d cosα; |
|
|||
|
и |
∆у = d sinα , |
|
||||
где d – |
|
|
|
|
– дирекционный |
||
горизонтальное проложение стороны хода; α |
|||||||
|
С |
|
|
|
|
|
|
угол этой же стороны. |
|
|
|
|
|
|
|
|
Вычисленные приращения координат ( ∆х и ∆у) записывают в |
||||||
графы 9 и 11 табл. 4, находят их суммы ∑∆хпр , ∑∆упр |
и приступают к |
||||||
их уравниванию. |
|
|
|
точки x83 и y83 |
|
||
Зная координаты начальной |
|
и приращения, |
|||||
можно вычислить координаты всех точек теодолитного хода:
х84 = х83 + ∆х83−84 ; |
2 |
|
у84 = у83 + ∆у83−84 ; |
2 |
|
|
х1 = х84 + ∆х84−1 = х84 |
∆хi ; |
у1 = у84 + ∆у84−1 = у84 |
|
∆уi ; |
||
+ ∑ |
+ ∑ |
|||||
|
i=1 |
|
i =1 |
|
||
х83 = х7 + ∆x7−83 = x7 |
n |
∆хi ; |
у83 = у7 + ∆y7−83 = y7 |
n |
∆уi , |
|
+ ∑ |
+ ∑ |
|||||
|
i =1 |
|
|
i =1 |
|
|
где п – число измеренных сторон хода.
11
∑∆xтеор = xк − xн; ∑∆утеор = ук − ун.
Для нашего примера
∑∆хтеор = х83 − х83 = 0; ∑∆утеор = у83 − у83 = 0.
Так как измерения длин сторон имеют погрешности, то суммы вычисленных приращений ( ∑∆хпр , ∑∆упр ) координат отличаются от
теоретического значения. Разности этих величин называют невязками приращений.
f∆х = ∑∆хпр −∑∆хтеор; f∆у = ∑∆упр −∑∆хтеор.
Невязки f∆х и f∆у показывают отклонение вычисленных коор-
динат конечной точки от её теоретического положения соответственно по осям х и у.
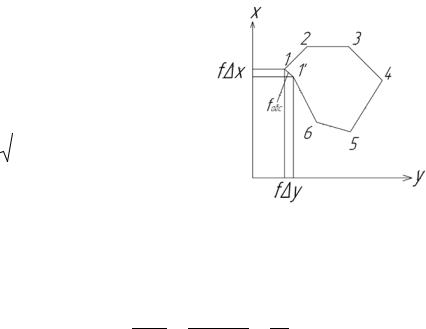
Для оценки точности используют линейную невязку, т.е. рас- |
|||||||
стояние |
между |
этими точками |
|
И |
|||
(рис. 3). |
Линейную величину fабс |
Д |
|||||
невязки определим как гипотенузу |
|||||||
прямоугольного треугольника с ка- |
|
|
|||||
тетами f∆х и f∆у . |
|
|
А |
|
|||
|
|
|
|
б |
|
|
|
|
|
|
|
|
|
|
|
|
fабс = ( f |
2 |
2 |
|
|
||
|
|
∆х + f ∆у ). |
|
|
|||
|
|
|
и |
|
|
|
|
Наилучшим образом точность |
|
|
|||||
измерений в ходе характеризует от- |
Рис. 3. Линейная невязка (1-1´) |
носительная невязкаС, т.е. величина |
|
линейной невязки, отнесённая ко всему периметру полигона. |
|
fотн = fPабс = P /1fабс = N1 ,
где п – число измерений сторон хода; Р – длина хода.
Относительную невязку принято записывать в виде дроби с единицей в числителе, что облегчает сравнение двух или нескольких
12

значений. Качество измерений в теодолитном ходе считают удовле-
творительным, если fотн = N1 ≤ 20001 .
Если полученная относительная невязка не превышает допустимого значения, то невязки f∆х и f∆у распределяют между прираще-
ниями координат.
Примеры в задании подобраны так, чтобы относительная невязка получилась допустимой. Если относительная невязка оказалась недопустимой, то в вычислениях допущены ошибки.
Дирекционные углы сторон хода вычислены по исправленным значениям горизонтальных углов βиспр . Следовательно, появление
невязок вызвано погрешностями измерения длин сторон хода. Кроме
того, погрешность измерения стороны ходаИпропорциональна её длине (т.е. чем больше длина стороны, тем большая вероятность появления погрешности в её измерении), поэтому невязки в приращениях координат распределяют пропорционально длинам сторон, для этого на каждую длину вычисляют поправку по формулам:
V = − |
f∆ |
х |
d |
; |
V = − |
f∆ у |
d . |
|
|
|
|
||||||
∆хi |
б |
Д∆уi |
i |
|||||
|
|
P |
|
|
|
|
P |
|
и |
|
|
|
|
|
|
||
Контролем прав льностиАраспределения поправок являются ра- |
||||||||
венства ∑Vхi = − f∆х; ∑V∆уi = − f∆у . |
Далее вычисляют исправленные |
|||||||
С |
|
|
|
|
|
|
|
|
значения приращен й коорд нат |
|
|
|
|
||||
∆хиспрi = ∆хi +V∆хi; ∆уиспрi = ∆уi +V∆yi .
Контролем вычислений служит выполнение равенств
∑∆хиспрi = ∑∆хтеор ; ∑∆уиспрi = ∑∆утеор .
Вычисление координат точек теодолитного хода производят по формулам:
х84 = х83 + ∆хиспр.83−84 ;
х2 = х1 + ∆хиспр.1−2 ;
х83 = х7 + ∆хиспр.7−83 ;
13