

1466
.pdfm .
сг, bг
Рис. 4.19. Резинометаллическая опора с гасителем колебаний
4.5.5.Инерционные динамические гасители
сактивными элементами
Значительно расширить функциональные свойства динамического гашения колебаний позволяет введение в их состав активных элементов, использование которых позволяет осуществлять настройку параметров гашения под изменяющиеся параметры внешних возмущений в широком диапазоне частот, отыскивать и реализовывать наилучшие законы для компенсации реакций /1/.
При гашении моногармонических колебаний активные элементы позволяют регулировать параметры динамического гасителя с целью обеспечения равенства частоты возбуждения и парциальной частоты гасителя
= г . |
(4.57) |
В качестве активного элемента могут использоваться электромагниты, позволяющие регулировать эквивалентную жесткость динамического гасителя колебаний (рис. 4.20).
F(t)  с
с
m

 сгэ
сгэ



 mг
mг
Рис. 4.20. Инерционный динамический гаситель с электромагнитом
В роли исполнительного элемента в системе динамического гашения крутильных колебаний удобно использовать модифицированную конструкцию двигателя постоянного тока. Для этого в двигателе (рис. 4.21) необходимо устранить относительный сдвиг полюсов ротора 1 и статора 2 и ликвидировать возможность переключения полюсов при колебаниях /1/.
При относительных смещениях элементов описанных выше электромеханических устройств, силовое взаимодействие носит квазиупругий характер.

Коэффициент эквивалентной упругости можно определить по формуле /1/
сгэ = k I2, |
(4.58) |
где I – сила тока в обмотках; k – постоянная, которая зависит от свойств магнитопроводов и обмоток.
а) |
б) |
2 |
|
1 |
> |
N |
|
S |
J |
S N |
c |
cг |
Jг |
N |
S |
|
|
S |
|
|
|
|
|
|
|
|
|
|
N |
|
|
2 |
cгэ |
1 |
|
Рис. 4.21. Управляемый динамический гаситель крутильных колебаний
Соотношение (4.58) примет вид /1/: |
|
для продольных колебаний |
|
сгэ = mг 2 ; |
(4.59) |
для крутильных колебаний |
|
сгэ = Jг 2 . |
(4.60) |
Как видно из полученных выражений (4.59) и (4.60), удобно регулировать эквивалентную упругость подвеса электромеханического гасителя путем изменения силы тока в обмотках пропорционально частоте возбуждения.
Другим способом изменения параметров гасителя может быть перемещение массы динамического гасителя 1 вдоль упругой балки с помощью регулируемого электродвигателя (рис. 4.22). Для выполнения режима наилучшего динамического гашения необходимо, чтобы фазы колебаний объекта 2 и гасителя 1 были сдвинуты на угол /2. Фазовый дискриминатор 4 (см. рис. 4.22, б) сравнивает показания датчиков 5 абсолютных перемещений объекта и гасителя и вырабатывает управляющий сигнал, который передается на реле 3 включения электродвигателя в соответствии с необходимым направлением компенсирующей настройки /1/.

1 |
3 |
mг |
а) |
|
2 |
сг |
|
|
|
m |
|
б) |
5 |
|
|
|
> |
||
1 |
3 |
||
|
|||
|
mг |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|||||
2 |
|
|
cг |
|
|
|
|
|
|
|
|
|
|
|
> |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
Рис. 4.22. Активный динамический гаситель |
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
Инерционность |
системы |
3 |
2 |
|
|
||||||||||||||||||||||||||||
управления |
накладывает |
свои |
|
|
|||||||||||||||||||||||||||||
ограничения |
|
на |
эффективность |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
активного динамического |
гаше- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
ния. Снизить массу присоеди- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
ненных к объекту частей возмож- |
|
|
|
|
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
но, если разместить корпус 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
исполнительного |
|
|
|
|
|
устройства |
Рис. 4.23. Активный динамический гаситель, |
||||||||||||||||||||||||||
активного гасителя (рис. 4.23) на |
установленный на неподвижном основании |
||||||||||||||||||||||||||||||||
неподвижном основании. В этом |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
случае передают силовое воздействие на какие-либо точки упругого объекта 2 по результатам измерения колебаний других точек (например, 3), вибрацию которых следует погасить /1/.
4.5.6. Гироскопические гасители колебаний
При гашении колебаний движущихся объектов, например транспортных средств, неподвижная система, относительно которой вырабатываются компенсирующие силы, действующие на объект, может быть реализована с помощью гироскопических устройств /1/.

Подобные системы действуют аналогично пружинному гасителю с трением, но устройство и принцип действия отличны. В качестве примера
|
|
|
на рис. 4.24 показана схема |
||||
2 1 |
J0 |
|
успокоителя |
бортовой |
качки |
||
|
судов. Ротор гироскопа 1 |
||||||
|
2 |
|
|||||
|
3 |
1 |
смонтирован |
в |
кожухе |
2, |
|
|
который может качаться отно- |
||||||
|
|
||||||
|
|
|
сительно судна вокруг оси 3, |
||||
|
|
|
перпендикулярной оси |
прецес- |
|||
|
P |
|
сии. Центр тяжести кожуха |
||||
|
|
располагается ниже оси кача- |
|||||
|
г |
|
ний на расстоянии |
. |
В роли |
||
4 |
|
|
демпфера используется |
тор- |
|||
|
|
||||||
|
Рис. 4.24. Схема успокоителя |
|
мозной барабан 4. Обычно |
||||
|
|
масса ротора составляет около |
|||||
|
бортовой качки судов |
|
1% от массы судна /1/. |
|
|
||
|
|
|
|
|
|||
Ротор приводится во вращение с помощью двигателя с максимально допустимой угловой скоростью max. Система дифференциальных уравнений для малых колебаний имеет вид /1/:
|
|
|
|
|
|
M(t) ; |
|
|
J c J0 max г |
|
|||||
J |
|
bг |
|
G г |
J |
|
(4.61) |
г г |
г |
0 max 0, |
|||||
где J, J0, Jг – моменты инерции соответственно судна относительно продольной оси, ротора и гасителя относительно поперечной оси; G – сила тяжести кожуха; г – угол поворота кожуха; bг – коэффициент вязкого трения; с – остойчивость судна; M(t)=M0ei t – момент внешних сил, зависящий от волнения моря.
Для гашения бортовой качки судна применяется также гироскопическая система с обратной связью. Исполнительный гироскоп (рис. 4.25, а) установлен таким образом, чтобы ось 3 кожуха 2 была расположена концентрично оси прецессии /1/.
Серводвигатель 4 через зубчатую передачу 5 осуществляет повороты кожуха с помощью сигналов малого направляющего гироскопа (см. рис. 4.25, б).
Направляющий гироскоп представляет собой сильно уменьшенную копию исполнительного гироскопа и устанавливается аналогично. Во время бортовой качки в результате поворота кожуха направляющего гироскопа замыкаются соответствующие контакты реле, включающего серводвигатель. Кожух исполнительного гироскопа поворачивается таким образом, что возникающий реактивный момент, действующий на опоры кожуха, противодействует качке /1/.

В современных судах для подавления качки применяют управляемые или неподвижные крылья, которые меняют угол атаки при крене таким образом, чтобы при обтекании их водой возникала подъемная сила, противодействующая качке. Такие устройства осуществляют стабилизацию, в отличии от гироскопических, лишь при движении судна /1/.
а) |
2 |
б) |
1 |
3 |
5
4
Рис. 4.25. Схема успокоителя бортовой качки судов с обратной связью: а – основной гироскоп; б – малый направляющий гироскоп
4.6. Поглотители колебаний
Поглотителями колебаний принято называть динамические гасители диссипативного типа. В отличии от динамических гасителей с трением поглотители колебаний эффективно работают в более широком частотном диапазоне.
4.6.1. Поглотители колебаний с сухим трением
Широкое распространение поглотители колебаний с сухим трением нашли благодаря простоте своей конструкции, малой массе и простоте обслуживания. Их применяют для гашения как крутильных, так и продольных колебаний. Рассмотрим для примера работу поглотителя крутильных колебаний объекта с одной степенью свободы (рис. 4.26). Диск с моментом инерции Jг присоединен к объекту с помощью пары сухого трения, создающей при относительных колебаниях постоянный момент величиной , противодействующий относительному смещению объекта и поглотителя /1/.
Дифференциальные уравнения системы имеют вид /1/:
J sgn( г ) c M0ei t ;
J |
|
|
|
(4.62) |
г г |
sgn( г ) 0. |
|||
Максимальное рассеивание энергии за цикл происходит при величине момента сил сухого трения, равной /1/
|
2 |
Jг 2 max, |
(4.63) |
|
|||
|
|
|
|

где max – амплитуда угловых колебаний вала при отсутствии демпфера. В качестве примера на рис. 4.27 показана конструкция поглотителя с
сухим трением. Ступица 1 жестко соединена с валом 2 и вовлекает во вращение, через фрикционные диски 3, маховик 4, свободно насаженный на вал. Степенью сжатия пружины 5 обеспечивается необходимая величина силы сухого трения. При колебаниях вала происходит относительное проскальзывание маховика и ступицы, приводящее к рассеиванию энергии вследствие трения на фрикционных поверхностях /1/.
4
5
J Jг
с
3
1
2
Рис. 4.26. Расчетная схема
Рис. 4.27. Конструкция
поглотителя колебаний с сухим
поглотителя колебаний
трением
с сухим трением
К недостаткам поглотителей сухого трения можно отнести непостоянство момента трения, вследствие износа и загрязнения трущихся поверхностей, а также возможность перекоса и заедания дисков /1/.
4.6.2. Поглотители колебаний с вязким трением
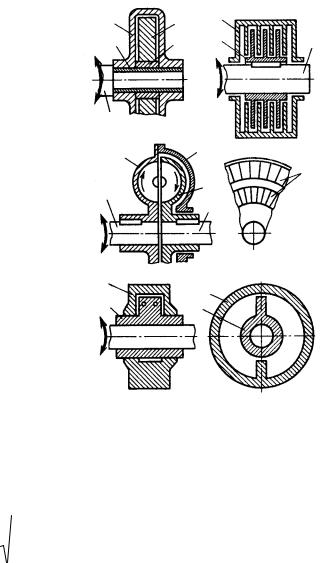
Схемы простейших поглотителей колебаний вязкого типа, присоединенные к демпфируемому объекту с одной степенью свободы, показаны на рис. 4.28. Поглотители колебаний используются для подавления как продольных, так и крутильных колебаний вне зависимости от закона изменения колебаний. По сравнению с динамическими гасителями с трением поглотители колебаний менее эффективны при подавлении моногармонических колебаний. Однако в ряде случаев им все равно отдают предпочтение из-за простоты конструкции и отсутствия упругого элемента, склонного к усталостным разрушениям /1/.
|
|
|
|
|
|
|
|
|
|
|
|
|
а) |
|
|
|
|
б) |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
4 |
2 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Поведение поглотителя коле- |
|
1 |
5 |
1 |
||||||||||||||
|
|
|
|
|
|
|||||||||||||
баний |
может |
|
быть |
описано |
M(t) |
|
|
|
M(t) |
|||||||||
уравнениями |
|
(4.24) |
в |
случае |
|
|
|
|
|
|
||||||||
продольных |
|
колебаний |
|
|
либо |
|
|
3 |
|
|
|
|||||||
уравнениями |
|
при |
крутильных |
|
|
|
|
|
||||||||||
|
|
|
1 |
|
|
2 |
||||||||||||
колебаниях /1/: |
|
|
|
|
|
|
|
|
|
в) |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
6 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i t |
; |
|
|
|
3 |
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
||||||
J b( г ) c M0e |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
(4.64) |
M(t) |
|
|
|
|
|
||||
Jг г |
bг ( г |
) 0 |
|
|
|
|
|
|
|
|||||||||
при условии, что сг 0. |
|
|
|
|
|
|
г) |
2 |
|
|
|
2 |
||||||
При |
0 bг |
/2mг 0 |
0 |
|
|
и |
|
|
|
|
||||||||
|
|
1 |
|
|
|
1 |
||||||||||||
0 получим системы с одной |
M(t) |
|
|
|
|
|
||||||||||||
степенью свободы. Их ампли- |
|
|
|
|
|
|
||||||||||||
тудно-частотные |
характеристики |
|
|
|
|
|
|
|||||||||||
показаны на рис. 4.29. Наилучшая |
|
Рис. 4.28. Схемы поглотителей |
||||||||||||||||
настройка |
|
поглотителя |
|
|
|
дает |
|
|||||||||||
максимум амплитуды в точке В. |
|
|
колебаний вязкого типа |
|||||||||||||||
|
|
|
харак-теристики в точке В |
|||||||||||||||
Величина |
0, |
обеспечивающая |
экстремум |
|
||||||||||||||
(сплошаная линия), определяется соотношением /1/ |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
1 |
|
|
. |
(4.65) |
|||||
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
2(2 )(1 ) |
|
|||||
На рис. 4.28,а показана простейшая конструкция поглотителя колебаний вязкого типа. Втулка 1 жестко связана с кожухом 2 и насажена на вал 3, крутильные колебания которого необходимо погасить. Расположенный внутри кожуха маховик 4, благодаря вкладышу 5, имеющему малый коэффициент трения, может проскальзывать относительно втулки. Малый зазор между кожухом и маховиком заполнен вязкой жидкостью /1/.
Демпфирующий эффект в поглотителе, показанном на рис. 4.28, б, создается при колебаниях жестко насаженной на вал 3 ступицы 1 с лопатками, прокручивающейся относительно маховика 2. Внтуренние камеры заполнены жидкостью с большой вязкостью /1/.

|a|/ |
|
|
|
|
|
4 |
0= |
|
0=0 |
|
|
|
|
|
|
||
3 |
|
|
|
|
|
2 |
|
В |
|
|
|
|
|
|
|
|
|
А |
|
|
|
|
|
1 |
|
|
|
|
|
0 |
|
|
|
|
|
0,6 |
0,8 |
1 |
1,2 |
1,4 |
|
|
Рис. 4.29. Амплитудно-частотная характеристика поглотителя колебаний |
|
|||
В поглотителе (рис. 4.28, в) ведущий вал 3 вращает полумуфту 1, имеющую торообразную полость с внутренними перегородками 6 и скрепленный с ней кожух 2, свободно прокручивающийся относительно аналогичной второй полумуфты 4, жестко соединенной с ведомым валом 5. Жидкость небольшой вязкости заполняет пространство между полумуфтами. Вследствие разности скоростей ведомого и ведущего валов под действием разности центробежных сил осуществляется круговая циркуляция жидкости в направлении, показанном на рисунке стрелками. Возникающие при этом кориолисовы силы осуществляют передачу крутящего момента /1/.
Демпфирующая сила в поглотителе (рис. 4.28, г) возникает при перетекании масла через малые отверстия при колебаниях диафрагмы 1 относительно заполненного маслом и свободно насаженного кожуха /1/.
4.7.Ударные гасители колебаний
Впоследние годы начинают получать распространение нелинейные гасители колебаний, и в частности ударные гасители колебаний.
Нелинейный гаситель колебаний не может осуществить полную
компенсацию |
колебаний при моногармоническом |
возбуждении |
х0(t)= 0( )ei t, |
и речь может идти только об их частичном подавлении. |
|
Уменьшая колебания на частоте внешнего воздействия, нелинейный гаситель возбуждает вместе с тем высокочастотные колебания системы. Эту особенность нелинейного динамического гашения следует иметь в виду в основном при использовании гасителей существенно нелинейного типа, например ударных /1/.

Для оценки эффективности нелинейных динамических гасителей колебаний помимо информации о динамической податливости или жесткости демпфируемых элементов необходимо знать уровень их колебаний до установки гасителей колебаний. Таким образом, в случае экспериментального определения характеристик демпфируемой системы нужно произвести соответствующие измерения колебаний в условиях нормального функционирования объекта /1/.
Основу ударного гасителя колебаний |
|
|
|
|
|
|
0( )ei t |
|
. |
|||||
составляет тело массой mг (рис. 4.30), |
|
|
|
|
|
|
|
|||||||
|
|
|
||||||||||||
соударяющееся |
с |
элементом |
А |
|
|
|
|
|
|
|
|
|
||
демпфируемой |
системы, |
колебания |
|
|
|
|
|
|
|
|
|
|||
которого |
|
следует |
уменьшить. |
|
|
|
|
|
|
А |
||||
|
|
|
|
|
|
|
||||||||
Наибольшее |
распространение получили |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
||||||
плавающие ударные гасители колебаний |
|
|
mг |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|||||||
(рис. 4.31, а, б, в), выполненные в виде |
|
|
|
|
|
|
|
|
|
|||||
шара, цилиндра, кольца, установленного |
|
|
|
|
|
|
|
|
|
|||||
свободно с зазором 2 . Плавающие |
|
|
|
|
|
|
|
|
|
|||||
гасители колебаний |
настраивают |
на |
|
|
Рис. 4.30. Расчетная схема |
|||||||||
режим двух |
поочередных |
соударений |
|
|
ударного гасителя колебаний |
|||||||||
a) |
|
|
б) |
|
|
|
в) |
mг |
||||||
|
|
|
0( )ei t |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
mг |
|
mг |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
г) |
|
|
д) |
|
|
|
е) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
mг |
|
|
mг |
mг |
|
|
сг |
|||||||
|
|
|
|
|
|
|||||||||
сг |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 4.31. Схемы ударных гасителей колебаний
тела о каждый ограничитель за период движения, дающий для таких устройств наибольший эффект. Наряду с этим используют пружинные (см. рис. 4.31, г) и маятниковые (см. рис. 4.31, д) ударные гасители колебаний с соответствующей подвеской гасителя. В таких устройствах реализуют, как

правило, режим односторонних соударений с одним ударом за период. Реже применяют аналогичные устройства двустороннего действия (см.
рис. 4.31, е) /1/.
На рис. 4.32 приведены статические упругие характеристики f(y) перемещения гасителя относительно деформируемой точки А объекта (см. рис. 4.30) для основных вариантов установки гасителей колебаний (а – плавающий гаситель колебаний; б – пружинный односторонний гаситель; в – пружинный двусторонний гаситель колебаний) /1/.
f(y) |
|
|
f(y) |
|
|
f(y) |
|
|
||
|
|
|
|
|
arctg cг |
|
|
|
|
arctg cг |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- |
0 y |
0 y |
- |
|
0 |
y |
|||
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а) |
б) |
в) |
|
Рис. 4.32. Статические упругие характеристики ударных ГК |
|
||
Непосредственная |
гармоническая |
линеаризация |
описанных |
статических характеристик невозможна, поскольку их значения при ударе неоднозначны. Удобным приемом является гармоническая линеаризация обратных функций y=Q(R), характеризующих зависимость относительного смещения от «упругой» реакции
у |
гасителя. |
Например, |
для |
гасителя |
|||||
|
колебаний плавающего |
типа |
(рис. |
||||||
|
|
|
|||||||
|
|
|
4.33) |
y= sgnR. |
Гармоническая |
||||
|
R |
линеаризация |
функций |
с |
помощью |
||||
|
обычных приемов дает y q(R0)R, где |
||||||||
|
|
q(R0) – коэффициент гармонической |
|||||||
|
|||||||||
|
|
|
линеаризации, |
|
зависящий |
от |
|||
|
|
|
амплитуды R0 |
периодической реакции |
|||||
|
|
|
гасителя, причем q=cг-1. |
|
|
|
|||
Рис. 4.33. Статическая упругая |
Известна зависимость 0( ), для |
||||||||
характеристика ударного гасителя |
которой плавающий ударный гаситель |
||||||||
колебаний плавающего типа |
обеспечивает |
полное |
подавление |
||||||
основного тона колебаний в широком
диапазоне частот возмущения /1/: