

1466
.pdf
|
Fкор = 2с (х0 – х) , |
(3.42) |
||
x0 |
|
xМ1 xМ2 xmax |
. |
(3.43) |
|
||||
|
2 |
|
|
|
Из формулы (3.43) видно, что необходимое значение х0 достигается подбором величин хМ1 и хМ2 монтажных деформаций пружин 1 и 2 /2/.
Условия уравновешивания сил на входном звене, совершающем возвратно-поступательное движение, для рабочего и холостого хода будут иметь вид /2/:
Fкор. рх mx Fрх Fср. рх Fкор. хх mx Fхх Fср. хх
,
,(3.44)
где Fрх – модуль силы сопротивления на рабочем ходе; Fср. рх – среднее значение силы сопротивления на рабочем ходе; Fхх – модуль силы сопротивления на холостом ходе; Fср. хх – среднее значение силы сопротивления на холостом ходе.
Разность между корректирующей силой, необходимой для полного уравновешивания механизма и корректирующей силой пружины обозначим как Fост. Тогда из условия (3.44), имеем /2/
|
(3.45) |
Fост mx Fс Fс ср Fкор , |
где Fс – модуль силы сопротивления; Fс ср сопротивления.
Параметры пружинного разгружателя наименьшего отклонения от нуля функции Fост.
– среднее значение силы
выбирают из условий
4.ВИБРОЗАЩИТА
4.1.Механические колебания
Механическими колебаниями называют движение механической системы, при котором происходит многократное поочередное возрастание и убывание во времени хотя бы одной из обобщенных координат или ее производной. Свободные механические колебания происходят без внешнего переменного воздействия, вынужденные – поддерживаются переменной во времени внешней силой /1, 2/.
Если состояние механической системы, описываемое обобщенными координатами или их производными во времени, повторяется через равные промежутки времени, то такие колебания называют периодическими. Периодом колебаний Т называется наименьший промежуток времени. через который повторяется состояние механической системы. Величина, обратная периоду, называется частотой колебаний f = 1 / Т. Период измеряется в секундах (с), а частота в герцах (Гц).
Уравнение движения механизма, совершающего колебательное движение, можно представить в виде /1, 2/:
|
|
|
(4.1) |
|
mq |
bq cq Q, |
|
||
где m – масса системы, участвующей в колебаниях; |
|
|
||
q, q, q |
– |
|||
соответственно обобщенная координата, скорость и ускорение; b – коэффициент демпфирования; c – коэффициент жесткости; Q – возмущающая сила.
При исследовании колебаний в механизмах стараются в уравнении движения (4.1) иметь коэффициент при старшей производной равный 1. Тогда уравнение (4.1) примет вид
|
|
|
|
2 |
|
|
(4.2) |
|
|
|
q |
2kq 0q Q/m, |
|||||
где k |
b |
|
|
2 |
|
c |
|
|
|
– коэффициент демпфирования; 0 |
|
|
– квадрат собственной |
||||
2m |
m |
|||||||
|
|
|
|
|
|
|||
частоты.
При свободных колебаниях, когда возмущающая сила отсутствует (Q=0), характеристическое уравнение имеет вид /1, 2/
p2 2kp 2 |
0. |
(4.3) |
0 |
|
|
Корни характеристического уравнения будут равны:

p k |
2 |
k2 . |
(4.4) |
||
1,2 |
0 |
|
|
|
|
При k для рассматриваемого уравнения решение будет иметь вид |
|||||
/2/ |
|
|
|
|
|
q ekt (c cos t c |
2 |
sin t), |
(4.5) |
||
1 |
* |
|
* |
|
|
или |
|
|
|
|
|
q ce kt sin( t ), |
(4.6) |
||||
|
* |
|
|
|
|
где с1, с2, с – постоянные, определяемые из начальных условий; –
начальная фаза; |
|
2 |
k2 |
– частота линейных затухающих |
* |
|
0 |
|
|
колебаний.
Постоянные с1, с2, с в уравнениях (4.5) и (4.6) при начальных условиях t=0, q=q0, q q0 соответственно будут равны /2/:
|
kq0)/ * . |
(4.7) |
с1=q0 ; c2 (q0 |
|
|
|
|
|
|
|
|
c q2 |
|
|
|
(q |
0 |
kq ) |
2 |
|
|
|
|
|
|
|
q |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
; |
arctg |
|
0 * |
. |
(4.8) |
|||||||
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
kq0 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
* |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
q0 |
|
|||||
Для уравнения консервативного типа при k=0 решение уравнения (4.3) |
|||||||||||||||||||||||||||||
будет иметь вид /1, 2/ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
q q |
0 |
cos |
t |
|
q0 |
sin |
0 |
t , |
|
|
(4.9) |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
||||
или |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
q Asin( 0t ), |
|
|
|
|
(4.10) |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
где A q2 |
|
q02 |
|
|
; arctg |
q0 0 |
. |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
0 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
q0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Для уравнения колебательного типа при k 0 уравнение (4.3) будет |
|||||||||||||||||||||||||||||
иметь вид /1, 2/ |
|
|
|
|
|
|
|
|
q A* sin( *t ), |
|
|
|
|
(4.11) |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
q0 * |
|
|
|
|
|
|
||
где A e kt |
|
q2 |
|
(q kq0) |
|
|
|
; arctg |
|
|
. |
|
|
|
|
|
|||||||||||||
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
* |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
q0 kq0 |
|
|
|
|
|
||||||
Переменный коэффициент А* – амплитуда затухающих колебаний, при t А* 0, поскольку показатель степени отрицательный. Уменьшение амплитуды колебаний характеризуется логарифмическим декрементом /2/

ln |
A*i 1 |
. |
(4.12) |
|
|||
|
A*i |
|
|
Затухающие колебания, описываемые уравнением (4.11), не являются периодическими, т.к. А* – функция времени. Однако значение функции sin( *t ) повторяется через равные промежутки времени t*=2 / * (t* –
условный период линейных затухающих колебаний) /2/. Величина * называется частотой линейных затухающих колебаний или собственной частотой системы с демпфированием. С увеличением коэффициента демпфирования амплитуда колебаний уменьшается и при k (или b 4ac) уравнение (4.11) переходит в уравнение (4.10). Значение коэффициента демпфирования, при превышении которого в механизме не возникают колебания, называют критическим коэффициентом демпфирования kк. Величину критического коэффициента демпфирования можно определить по формуле /2/
kк 0 c/m . |
(4.13) |
4.2.Диссипативные характеристики механических систем
Впроцессе колебания упругих систем часть энергии безвозвратно рассеивается в окружающую среду. Эти потери обусловлены диссипативными силами – силами неупругих сопротивлений, на преодоление которых постоянно и необратимо расходуется энергия колебательной системы. Характеристика диссипативной силы зависит от природы сил сопротивления.
Диссипативные силы Fд, которые возникают при малых колебаниях в вязкой среде (жидкости или газе), характеризуются коэффициентом сопротивления b1 и описываются выражением /1/
|
|
|
|
(4.14) |
Fд(q) b1q. |
||||
При больших виброскоростях диссипативные силы имеют |
||||
квадратичную зависимость от скорости /1/: |
|
|||
|
|
2 |
sgnq. |
(4.15) |
Fд(q) b2q |
|
|||
При включеии в составе демпферов элементов сухого трения для описания диссипативной силы можно использовать следующее выражение
/1/:
|
|
(4.16) |
Fд(q) b0 sgnq, |
||

где b0=const – сила сухого трения.
В общем виде диссипативную силу можно представить следующей зависимостью /1/:
|
|
|
|
|
|
(4.17) |
|
|
|||||
Fд(q) b |
|
q |
|
|
sgnq, |
где , b – постоянные.
На практике разделить полную силу на упругую и диссипативную составляющие практически невозможно. Это относится к силам внутреннего трения, возникающим при деформации упругого элемента, и к силам конструкционного демпфирования, связанного с рассеиванием энергии в процессе деформации неподвижных соединений (резьбовых, заклепочных и т.д.).
При циклическом демпфировании, например по закону
q= q0cos t , |
(4.18) |
упругодиссипативного элемента наблюдается различие линий нагрузки и разгрузки на диаграмме «сила – перемещение» (рис. 4.1). Это явление получило название гистерезис. Работа диссипативных сил за один цикл деформирования будет пропорциональна площади фигуры, ограниченной петлей гистерезиса. Энергия , рассеянная за один цикл деформирования, будет равна /1/
|
Fд |
|
|
|
Fд |
|
|
|
Fд |
|
|||
|
|
|
|
|
|
|
|
|
|
|
b0 |
|
|
|
b1 |
|
|
|
|
b2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
q |
|
|
|
1 |
q |
|
|
|
1 |
q |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- b0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а) б) в)
Рис. 4.1. Характеристики диссипативных сил:
а) линейная; б) квадратичная; в) элемента сухого трения
|
T |
|
(4.19) |
|
|
|
|
F(q,q)dq Fд(q)qdt. |
|||
|
0 |
|
|

Для упругодиссипативного элемента, имеющего характеристику /1/
|
|
(4.20) |
F(q,q) Fу(q) Fд(q), |
||
петля гистерезиса при деформации по закону (4.18) имеет вид эллипса (рис. 4.2). Большая ось эллипса наклонена под углом , который характеризует жесткость элемента с = tg . Энергия, рассеянная за цикл, будет равна
T |
2 |
|
|
2 |
T |
2 |
|
2 |
|
|
|
(t)dt b1 |
(a ) |
sin |
tdt a |
b1 . |
(4.21) |
||||
b1q |
|
|
|
|
||||||
0 |
|
|
|
|
0 |
|
|
|
|
|
Элемент с сухим трением имеет вид петли гистерезиса, показанный на рис. 4.3. Рассеянная за цикл энергия такого элемента будет равна /1/
F(q,q) |
F(q,q) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- 1 |
|
1 q |
|
- 1 |
|
|
1 q |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 4.2. График деформации |
Рис. 4.2. График деформации |
|
упругодиссипативного |
элемента с сухим тернием |
|
элемента |
|
|
|
4ab0 . |
(4.22) |
Для оценки рассеяния энергии при колебаниях упругодиссипативной системы используют коэффициент поглощения. Потенциальная энергия П упругого элемента при линейной упругой характеристике, будет равна /1/
П 0,5ca2, |
(4.23) |
а коэффициент поглощения
|
2 |
. |
(4.24) |
|
|||
|
ca2 |
|
|
При исследовании периодических колебаний системы по закону (4.18) исходную динамическую характеристику F(q,q) заменяют эквивалентной упруговязкой моделью
|
|
(4.25) |
F(q,q) cq bq. |
||
Коэффициент b эквивалентного демпфирования подбирают из условия равенства поглощающих способностей исходной и заменяющей схемы.
Исходный диссипативный элемент согласно (4.24) рассеивает энергию:
0,5 ca2. |
(4.26) |
||
Энергия, рассеянная линейным демпфером, согласно (4.21) будет |
|||
равна /1/ |
|
||
a2 b. |
(4.27) |
||
Приравняем (4.26) и (4.27) и получим величину эквивалентного |
|||
коэффициента сопротивления /1/ |
|
||
b |
c |
. |
(4.28) |
|
|||
|
2 |
|
|
Полученный коэффициент зависит как от характеристик диссипативных сил, так и от параметров процесса.
Поглощающие свойства большинства материалов не зависят от частоты деформации. В связи с этим диссипативные свойства материала принято характеризовать с помощью коэффициента поглощения или связанного с ним выражением = 2 логарифмического декремента колебаний . Логарифмический декремент колебаний определяется экспериментально по формуле (4.12).
Конструктивное демпфирование также практически невозможно определить расчетным путем. Обычно его определяют экспериментально.
4.3.Модель простейшей виброзащитной системы
Влюбой виброзащитной системе (ВЗС) можно выделить три основные части. Это источник возмущения, объект виброзащиты и расположенное между ними виброзащитное устройство (ВЗУ) /1/.
Впростейшем случае объект и источник считаются твердыми телами,
совершающими возвратно-поступательное движение вдоль оси х
(рис. 4.4, а).

Со стороны источника действует внешняя сила F, она, как и реакции со стороны ВЗУ R и R’, направлена вдоль оси х, которая и является осью виброизолирующего устройства.
В большинстве существующих ВЗС масса источника больше массы объекта или, наоборот, масса объекта больше массы источника. В этом случае движение тела «большой» массы можно считать не зависящим от движения тела «малой» массы.
Если «большую» массу имеет объект, то его считают неподвижным. Колебания в системе возникают за счет внешних сил F=F(t), действующих со стороны источника (см. рис. 4.4, б). Такое воздействие принято называть силовым /1/. Данную схему используют при расчете виброзащитных систем зданий и сооружений, их фундаментов при защите от динамических воздействий со стороны установленных на них машин и механизмов, создающих вибрационное воздействие /1/.
|
|
Источник |
|
ВЗУ |
Объект |
||
|
|
|
|
|
R’ |
|
|
а) |
F |
|
R |
|
|
x |
|
|
|
|
|
|
|
|
|
б) |
F |
|
R |
|
R’ |
x |
|
|
|
|
|
|
|
в) |
R |
|
R’ |
|
x |
|
|
|
|
|
|
 (t)
(t)
Рис. 4.4. Схемы простейших виброзащитных систем
Если «большую» массу имеет источник (см. рис. 4.4, в), то закон его движения = (t) считается заданным. Такое воздействие называется кинематическим возбуждением. Эту схему используют при расчете виброзащитных систем различных приборов и точных механизмов, установленных на колеблющемся основании, а также при расчете виброзащитных систем для операторов мобильных машин /1/.
Назначение виброзащитного устройства, в зависимости от задач виброзащиты, состоит в уменьшении колебаний, передаваемых от объекта к источнику и, наоборот, от источника к объекту. В большинстве случаев этого можно достичь использованием одноосного виброизолятора (см. рис. 4.4). Реакции R и R’такого виброизолятора равны по величине и направлены вдоль одной оси (в нашем случае оси х). В простейшем случае
реакция R пропорциональна деформации |
и скорости деформации |
|
|
||
виброизолятора /1/: |
|
|
|
(4.29) |
|
R c b . |
||
Зависимость (4.29) носит линейный характер. Коэффициенты с и b называются жесткостью и коэффициентом вязкости. При b = 0 мы получаем характеристику идеального упругого элемента, а при с = 0 – идеального вязкого демпфера.
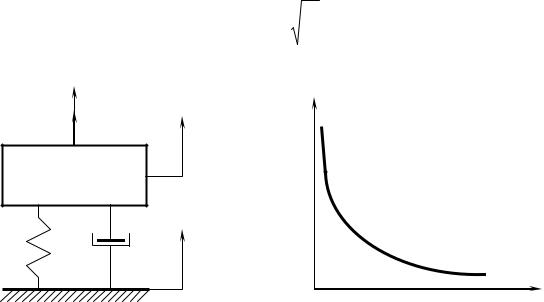
Собственная частота простейшей виброзащитной системы (рис. 4.5) с характеристикой (4.29) будет равна /1/
0 |
|
c |
. |
(4.30) |
|
||||
|
|
m |
|
|
X
F |
0 |
|
x |
||
|
m
c |
b |
|
|
|
|
0 |
ст |
Рис. 4.5. Схема простейшей |
Рис. 4.6. Зависимость собственной |
||
|
виброзащитной системы |
|
частоты от статической осадки |
|
|
|
виброизолятора |
Значение статической осадки ст виброизолятора зависит от его жесткости с и определяется по формуле /1/
ст |
gsin |
, |
(4.31) |
2 |
|||
0 |
|
|
|
где – угол наклона оси виброизолятора к горизонту.
В качестве примера на рис. 4.6 показана типовая зависимость0= 0( ст) собственной частоты от величины статической осадки линейной виброзащитной системы.
Довольно часто в виброзащитных системах используют несколько соединенных виброизоляторов, которые образуют сложный виброизолятор. Для упрощения расчетов такую систему приводят к виду,

показанному на рис. 4.5. Эквивалентную жесткость виброизоляторов и коэффициент вязкости определяют в зависимости от типа соединения. При последовательном соединении двух виброизоляторов их эквивалентная жесткость и коэффициент вязкости будут равны/1/:
c |
|
c1 c2 |
; |
(4.32) |
|
|
|
||||
|
c1 c2 |
|
|||
b |
|
b1 b2 |
. |
(4.33) |
|
|
|
||||
|
|
b1 b2 |
|
||
При параллельном соединении двух виброизоляторов эквивалентная |
|||||
жесткость и коэффициент вязкости равны /1/: |
|
||||
с = с1 + с2 ; |
(4.34) |
||||
b = b1 + b2 . |
(4.35) |
||||
4.4. Эффективность виброзащитной системы
Эффективность виброзащиты оценивается степенью реализации виброзащитным устройством целей виброзащиты. Так, при силовом гармоническом возбуждении ( (t) = 0) по закону F(t) = F0 sin t (F0 – возмущающая сила; – частота возмущающей силы) можно решать две задачи: уменьшение амплитуды R0 силы, передаваемой на неподвижный объект, или уменьшение амплитуды Х0 установившихся вынужденных колебаний объекта /1/.
Величину амплитуды силы R0 и амплитуды установившихся вынужденных колебаний системы Х0 для простейшего виброизолятора (см. рис. 4.5) можно определить по формулам /1/:
|
|
|
F |
4 |
|
b2 |
|
2 |
|
|
|
|
|
|
|
|
|
|||||||
m2 |
|
|
|
|
|
|
|
|
|
|||||||||||||||
0 |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
R0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
; |
|
|
|
(4.36) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
b2 |
|
|
|
|
|
|
||||||||
2 |
|
2 |
|
2 |
|
|
|
|
2 |
|
|
|
|
|
|
|||||||||
|
|
|
( 0 |
|
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
m2 |
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
F0 |
|
|
|
|
|
|
|
|
|
|
|||||||
X0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
(4.37) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
2 |
|
|
2 |
|
2 |
|
|
b2 |
|
|
|
|
2 |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
m ( 0 |
|
) |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
m2 |
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
При кинематическом возбуждении (F(t) = 0) по закону (t) = 0 sin t целью виброзащиты может быть: уменьшение амплитуды Х0’ колебаний объекта относительно основания или уменьшение амплитуды абсолютного