Шпоры_2011
.doc
|
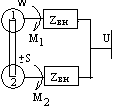
18.Режим простейшей системы при несинхронной скорости Г-а. Система состоит из СГ, ротор которого вращается со скоростью ωr, отличной от синхронной. Г-р подключен к шинам неизмен. U и ω0.
Данный режим может возникнуть: 1. При резких изменениях режима системы, вызывающих качение или выпадение из синхронизма (ω≠ωс). 2. При взаимно несинхронной работе систем связанных ЛЭП. 3. При работе Г-в в установившемся асинхр. ходе, после окончания выпадения из синхронизма. Скольжение S= -dδ/ω0dt= (ω0-ωГ)/ω0=1-ω*.
Основные особенности процессов: 1. В СГ и ЛЭП циркулируют токи двух частот ωГ и ω0. 2. СГ приобретает свойства АМ , т. к. появляется скольжение. 3. Изменяются параметры СМ, т. к. Е зависит от S и созданный ток с частотой ωГ проходит через реактив. сопротив-е, изменяющееся в отношении Хω=(ωГ/ω0)Х. Предположим рассматриваемую СМ можно разделить на две – СМ и АМ, механически связанных меж собой.
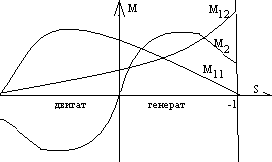
I= I11- I12= Eω /zω– U/z; z=r+jx; zω=r+jω*x= r+j(1-S)x; S1=P1 +jQ1= EωÎ, S2=P2 +jQ2= UÎ, где эдс системы Eω=(ω*)nE, Е – эдс системы при синхронной частоте, n=1…3, зависит от способа создания тока возбуждения, S1= EωÎ=(ω*)nEÎ=(ω*)nE [(ω*)nE/žω– Û/zвн] =(ω*)2nE2/žω– Û(ω*)nE /zвн=(ω*)2nE2(r+j ω*x)/[r2+(ω*x)2] – (U(ω*)nE /zвн)sin(δ+πα/2), где δ= δ0-St – угол между векторами Eω и U, δ0 – в синхрон. режиме, α=arctg(r/x). Р1=(ω*)2nE2 rω/z2вн – (U(ω*)nE /zвн)sin(δ0-St-α), Q1=(ω*)2nE2 xω/z2вн – (U(ω*)nE /zвн)сos(δ0-St-α), где rω=rω (r2+x2)/ [r2+ (ω*x)2], xω=x (ω*)2n-1 (r2+x2)/ [r2+ (ω*x)2], Вращающий момент Г-а: М1= Р1/ ω*=(1-S)2nE2 rω/z2вн + (UE /zвн)sin(δ0-St-α)=M11+M12sin(δ0-St-α), M11- собственный момент, М12 – взаимный момент. В конце передачи Р2= (ω*)nsin(δ0-St+αω)√[(1+ρ2)/((1-s)2+ ρ)] UE /z – U2sinα /z, Q2= (ω*)ncos(δ0-St+αω)√[(1+ρ2)/((1-s)2+ ρ)]UE/z– U2cosα /z, где ρ=r/x, αω=arctg(r/ω*x), М2= U2S/r(1+(x1S/r)2), где x1=хd/xd/( xd- хd/), х1/r=Td/.
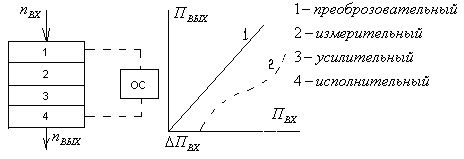
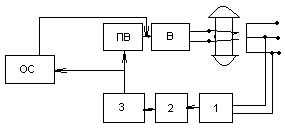
20. Общие сведения о регулировании возбуждения и скорости агрегатов ЭС. Агрегаты ЭС должны обеспечивать качество выдаваемой энергии, что достигается с помощью регуляторов. АРВ воздействует на ток возбуждения и обеспечивает качество U улучшает устойчивость и улучшает качество пп. АРЧ и АРЧВ воздействует на пуск ТУ, поддерживает частоту вращения генераторов. Регуляторы стабилизируют частоту вращения реагируя на её отклонения - АР Скорости Регуляторы АРЧ реагируют на общее изменение в системе и их называют общесистемными регуляторами. АРЧ действуют на первичный двигатель с помощью промежуточного воздействия на АРС. Любой регулятор представляется в виде структурной схемы состоящие из четырёх основных элементов:
РВ и РЧ являются регуляторами без зоны нечувствительности ( интервал изменения параметра)осуществлений непрерывности. Характеристика 1- без зоны нечувствительности; 2-при наличии ΔПВХ. При этом воздействии регулятора на исполнительный элемент ПВЫХ пропорционально отклонению параметра. АРВ разделяются на регуляторы с зоной нечувствительности и осуществление прерывистого регулирования и регуляторы без зоны нечувствительности осуществляющие непрерывное пропорциональное регулирование. АРВ пд ( регуляторы ~, изменяющие IВОЗБ ~ отклонению к/л параметра) АРВ сд ( реагируют на отклонение параметра и скорости, ускорения и их изменение) должны обладать малой инерционностью.
С элемента 3 на ПВ (подвозбудитель) подаётся необходимые величины напряжения, которая обуславливает напряжение на входе ПВ(МПТ) с которой U подаётся на обмотку возбуждения СГ. Исполнительный элемент – В ПВ и ОС. Уравнение для регулирования возбуждения: TeЭTd0(d2ΔEq /dt2)+ (TeЭ+Td0) (dΔEq /dt)+ ΔEq=KOUΔU0 Уравнение для регулирования скорости: TSTY(d2Δμ /dt2)+ (TS+βTY) (dΔμ /dt)+ β Δμ =KώΔώ
|
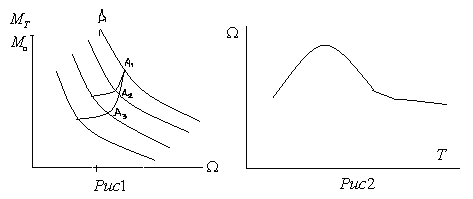
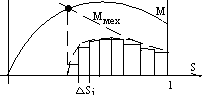
25. Физическая трактовка уравнений для регулирования турбины В практически существенном диапазоне для рассмотрения задачи dM/dΏ = const т.е. при постоянном открытии μ= const зависимость M=f(Ώ) представляется прямой линией; Ώ – механическая скорость.
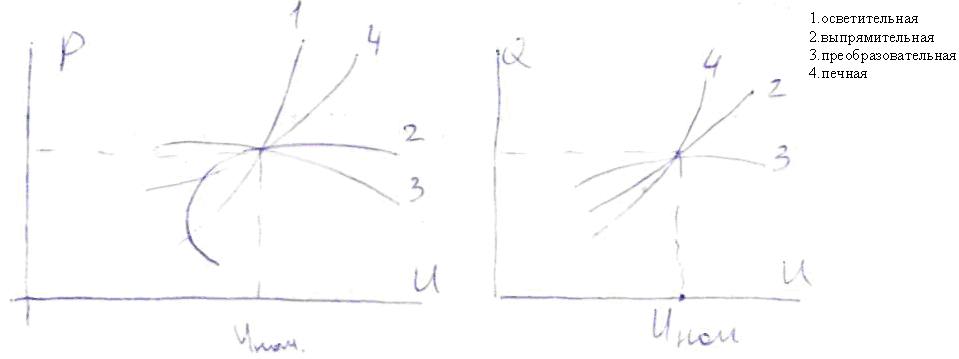
На рисунке 1 при медленном изменении режима показывают как будет меняться момент ТУ в зависимости от скорости, они представляет собой статическую характеристики. При быстром изменении режима процесс происходит в регул. ТУ будет определяться линейной характеристикой до тех тех пор пока регуляторы скорости не приведут в действие на характеристике 1 этот участок АА1 запаздывание Δt по времени отвечающие этому участку покажем на характеристике мех. скорости( рис 2) Зависит от неустойчивости регулирования и запаздывания серводвигателя при этом изменяется от ώ до ώ1 Далее наступит 2 стадия процесса когда регулирование придёт в действие и будет перемещать задвижку, что на характер рис 1 будет отражено перемещением т из А1 в точки А2 А3…Аn . В результате действия регуляторов в конце 2 стадии процесса при ↓ Эл. Нагрузке восстанавливается прежняя скорость Ώ0 или устанавливается некоторая скорость Ώ01 близкой к Ώ0. 29. Характеристики комплексной нагрузки Каждый узел нагрузки содержит большое число различных потребителей электрической энергии. Рассмотрим их статические характеристики
1-осветительная;2-выпрямительная;3-преобразовательная;4-печная Получить аналитическую зависимости статических характеристик не представляется возможным и достоверность информации м/б получена на основе обработок результатов. На практике в простом случае используются зависимости типа ΔРН=аUΔU+afΔf ΔQН=bUΔU+bfΔf аU, af, bU, bf – коэффициенты регулирующие эффекты нагрузки по U и f Если они положительны то ↑ U приведёт к росту ΔQН нагрузки что в свою очередь вызовет ↓ U. Что в свою очередь вызовет ↑↓ U в элементах как результат U на зажимах нагрузки снизится и скажется на его регулирующий эффект 30. Динамическая устойчивость АД
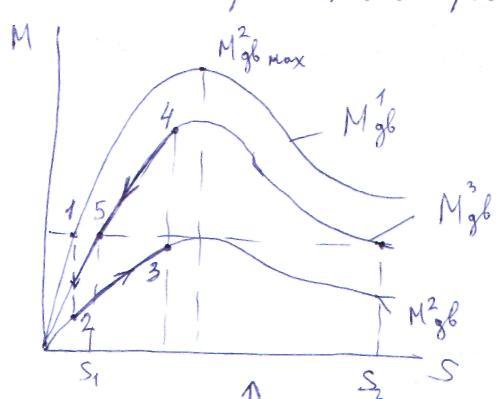
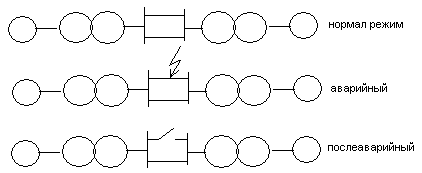
Рассмотрим динамический переход состоящий из трёх фаз: 1-нормального режима; 2-аварийного режима к.з.; 3 –послеаварийного режима. Все 3 фазы динамического перехода отображены статическими характеристиками МАВ(S) в рассматриваемых режимах U1>U3>U2 это условие автоматически приводит к соотношению М1>М3>М2. При больших возмущениях АД в силу инерционности агрегата скольжение изменяется мгновенно не может. Момент двигателя уменьшается скачком из т.1 в т.2 возникает положительный небаланс момента который тормозит двигатель и скольжение возрастает такое движение до т.3 в котором происходит выключение аварийного участка после ликвидации к.з. вращающий момент двигателя возрастает( т.4). Не баланс момента становиться отрицательным двигатель ускоряется и S↓ и возникает новый установившийся режим в т.5 соответствующий скольжению S1. Если отключение аварии произойдёт при скольжении большим чем S2 то АД всё равно продолжит торможение и остановиться.
37. Протекание процессов во времени при больших и малых возмущениях. Решение диф уравнений при больших откланениях параметров режима и резких изменениях мощности отдаваемой ген в сеть. Такие случаи возникают при КЗ при к-х взаимное сопротивление м-ду ген и нагрузкой возрастает что приводит к прогрессирующему уменьшения угла δ и изменения скорости вращения ротора появл изменения скорости ∆ω=dδ/dt В качестве осн допущения в большинстве случаев применяют что величина вращающегося момента и мощности в о.е. равны между собой. Это допускает что изменение скорости на противоположное всего времени ПП значительно меньше чем асинхронная скорость в месте с тем это изменение скорости на столько значительно что ген выскочить из синхронизма. Составление уравнения будет справедливы только для времени пока ген явно не выпал и его относительная скорость ∆ω не стала соизмеримой с синхр скоростью ωо. Допущения: - Не учитывают изменение во времени свободных токов появляющихся в ген. Применяется неизменная величина E’q=E, действие регуляторов скорости в большинстве случаев не учитывает, АРВ учитывает при помощи введения условной неизменной ЭДС.
|
34. Определение предельного угла отключения к.з.
Рассмотрим систему которая имеет 3 режима
Приравнивая площадку ускорения к площадке торможения тогда выражая угол δ в рад а мощность в о.е можно записать
Предельный угол – это угол при отключении до которого устойчивость простейшей системы сохраняется. После преобразования можем записать Р0(δоткл-δ10)+Р3М(cos δоткл пр- cos δ10)+Р0(δКР- δоткл пр)+ Р2М(cos δКР- cos δоткл пр)=0 Тогда cos δ пр= (Р0(δКР- δ10)+ Р2М(cos δКР)- Р3Мcos δ10)/ Р2М- Р3М В случае 3х фазного к.з. или полного разрыва передачи характеристика аварийного режима при этом Р3М=0 Предельному углу отключения соответствует определённое время от начала к.з. которое называется временем отключения если к.з. будет отключено за время t<tоткл пр то система сохранит устойчивость при к.з. если больше устойчивость нарушиться. Проведённый анализ позволяет сформулировать критерий динамической устойчивости системы площадка ускорения должна быть меньше площадки торможения
31. Элементарная теория динамической устойчивости. Критерии динамической устойчивости характеризует способность системы сохранять синхронную работу и восстанавливать исходный режим при резких его изменениях. Динамические переходы возникают под действием резких изменений режима, которые вызываются изменением параметров системы, обуславливаемые изменением сопротивления системы из-за кз, отключением линии передачи, трансформаторов или генераторов. При анализе переходных процессов не будем учитывать апериодических слагающих тока статора и периодических слагающих тока ротора, это позволяет применить упрощенное уравнение. Предполаг. что электромеханический пп протекают при изменении скорости ▲ω не превышающей 2-3% от синхронной в этом случае вращающий момент в о.е. может быть принят численно равен мощности. ωое=1, ▲ωое=0,02 Мое=Рое/ωое+▲ωое=Р/1,02≈Рое. В большинстве случаев действие регулятоов скорости не учитывается а действие регуляторов возбуждения учитывается введением условной Е=const. Изменение мощности во всех ПП происходящих в системе не могут совершаться мгновенно, т.к. они связаны с изменением запаса механической и электромагнитной энергии в отдельных элементах системы. Однако при рассмотрении ЭПП с помощью упрощенных уравнений принимают что электромагнитные и механические процессы не препятствует мгновенному изменению активной электромагнитной мощности. Данное допущение означает отказ от учета апериодической составляющей тока и U во всех элементах электрической сети. Получаем выражение мощности в виде:
Т.о. изменение мощности генератора, его тока статора свободного тока возбуждения рассматривают как происходящие мгновенно при резком возмущении |
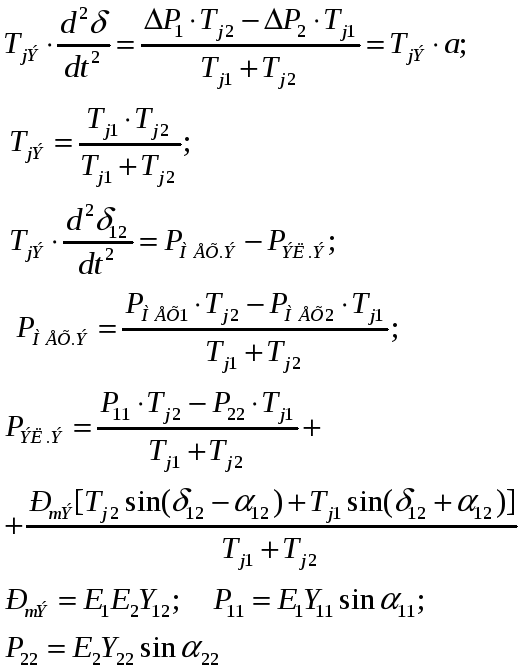
35. Способ площадей при исследовании динамической устойчивости двух станций. Рассмотрим систему, состоящую из двух станции и промежуточных нагрузок, которую можно свести к простейшей системе: станция – шины неизменного напряжения.
Пусть в схеме происходит изменение каких-либо нагрузок, количество работающих генераторов или включенных в работу линии. Изменение РЭЛ, отдаваемые генераторами станции или их РМЕХ приводят к небалансу активной мощности (возмущению) на каждой из станции. Тогда для первой станции мы можем записать
δ12 = δ1 – δ2 - угол между Е1 и Е2; δ12 = -δ21. α11 = 900 – ψ11 – аргумент фазового угла, дополненного до 900. Все величины в уравнениях соответствуют изменившемуся уравнению. ∆Р1 и ∆Р2 вызовут перемещение роторов станции, вызвав ускорение.
Вычтем почленно второе равенство из первого
δ12 – взаимный угол; а – относительное ускорение, создающее перемещение вектора напряжения станции 1 относительно вектора напряжения станции 2.
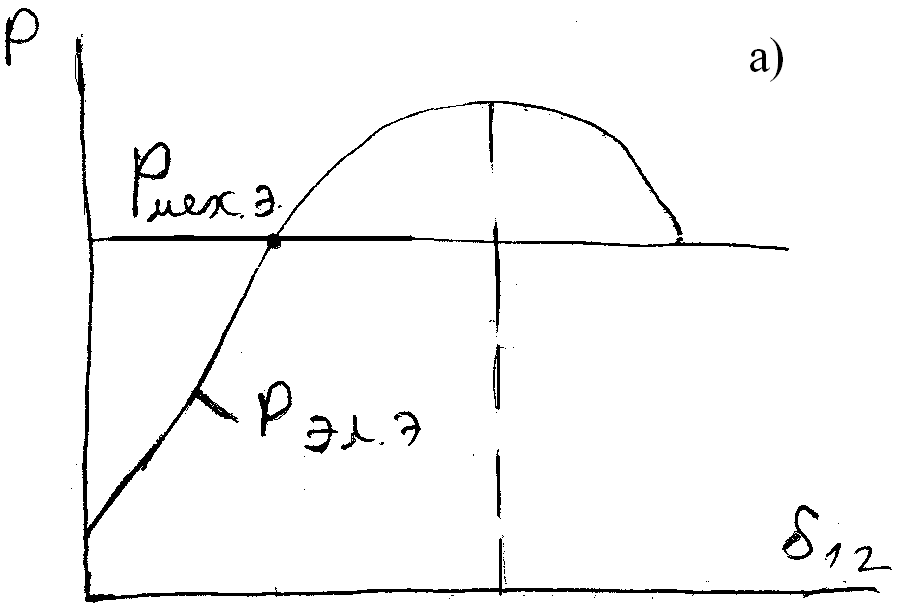
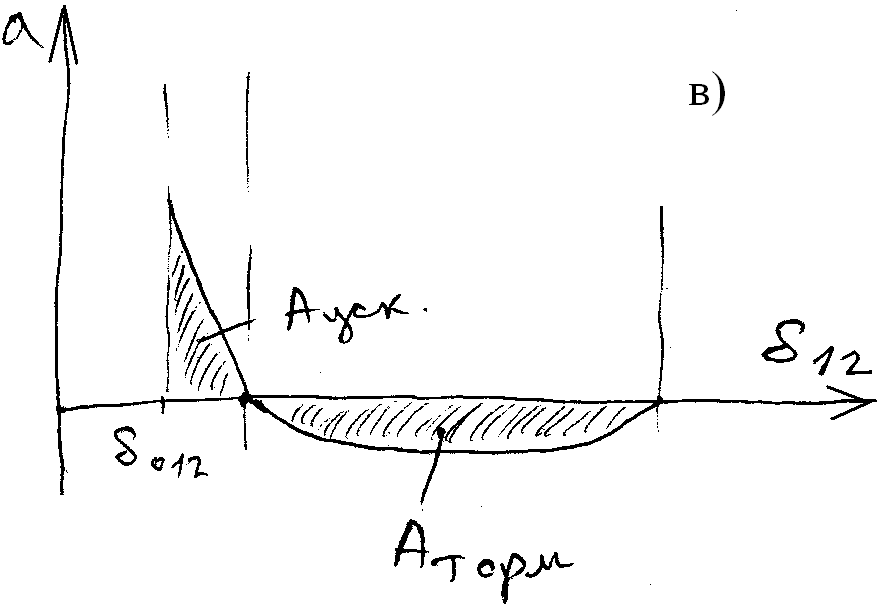
Применительно к уравнению РЭЛ.Э построим характеристики мощности Р = f(δ12) и характеристики относительного ускорения а = φ(δ12).
Для определения характера перехода, запаса устойчивости и размаха колебании достаточно построить характеристику а = φ(δ12). На рис. б характеристика а = φ(δ12) относится к устойчивому режиму, так как Ауск. < Аторм.. В этом случае Аторм = Аторм1 + Аторм2; Ауск = Аторм1; К = (Аторм/Ауск) = 1 + (Аторм2/Ауск). ∆δmax – максимальный размах колебании угла δ. Характеристика на рис. в изменение относительного ускорения в случае неустойчивого перехода, когда Аторм. < Ауск. В случае определения предельного угла отключения К.З. ∆Р1 и ∆Р2 вычисляют дважды: «Один раз для режима К.З. и второй раз для режима после отключения К.З. и, соответственно, строятся два раза характеристики а = φ(δ12).
δоткл.пр определяется по аналогии рассмотренной выше.
|
|
36. Учет демпфирования при исследовании динамической устойчивости двух станций. Демпфирование при малых изм-ях скорости математически отражается в уравнениях. PdэS, где Pdэ=Kг-Pd;Kг<<Pd следовательно Pdэ<0 Рассмотрим этот случай с учетом, что для мощности можем записать: Р=Р11+(EU/X)sinδ+PdэS (1) P=Р11+(EU/X)sinδ-PdS=P1-PdS (2) В этих уравнениях при сорости выше синхронной скольжение принемается «-».
Предположим р-р начинает движение в точке а под действием избыточного момента ▲Ро, но т-а характеризующая положение ротора будет перемещаться не по пунктирной кривой akcef, соответствующей характеристике Р1=Р11+(EU/X)sinδ, а по сплошной кривой аbе которая будет выше кривой Р1при отрицательном S, т.е. при росте угла δ и ниже при положительном соответствии уменьшении угла δ. В результате под действием дополнительного момента, обусловленного скольжением площадка ускорения уменьшается от значения aa1ca до aa1ba; площадка тормозится ограниченная ранее cef и прямой сe1f1 за счет демпферного момента РdS произошло сокращение размаха колебаний от δmax1< до δmax2. При Рdэ>0 появляется момент уменьшающий Р1 и кривая Р1-Рdэ будет располагаться ниже кривой Р1.
Площадка ускоряется повышаясь от ac1ba на abc1ca1a это приводит к повышению размаха колебаний угла до δmax1>δmax2 Площадка торможения начинающая второй цикл качания будет: cc1bfe1ec ее уравновесит площадка ускорения ca1d1dc угол достигнет δmax3, т.е. происходит нарастание колебаний - самораскачивание.
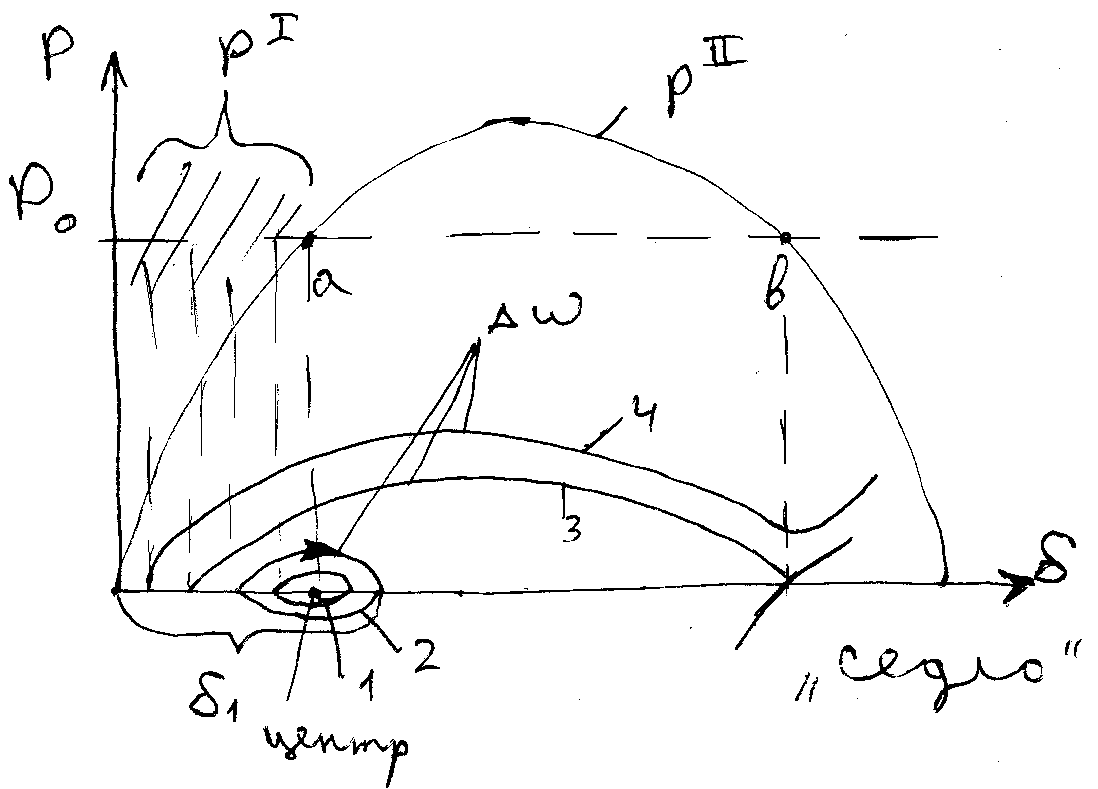
39. Численное решение упрощенного (при Е’q = const) уравнения относительного движения ротора, представление процесса на фазовой плоскости. Пусть переходный процесс описывается уравнением
Также предположим, что Е’q = const. Обозначим φ(δ) = Р* - sinδ. Рассмотрим движение ротора генератора во время переходного процесса на фазовой плоскости ω, δ, где изменение скорости относительно синхронной ω = dδ/dt.
Тогда исходное уравнение примет вид
Решая полученное уравнение, запишем
Это решение представляет собой семейство фазовых траектории, каждая из которых соответствует определенному значению угла δ1. Согласно теории колебании об устойчивости режима можно судить, рассмотрев особые точки исследуемого режима, т.е. точки, в которых величина (d∆ω/dδ) не определена, т.е. через эти точки проходят несколько фазовых траектории, либо не проходит не одной. Эти точки соответствуют условиям φ(δ) = 0, ∆ω = 0. Это точки a и b равновесного состояния системы.
Второй тип точки
– «седло», в которой система не
устойчива и малое отклонение от
состояния равновесия приводит к уходу
от начальной точки. Характеристики
на рисунке представлены для консервативной
системы. Точке типа «центр» соответствует
максимум потенциальной энергии. Для
центра
|
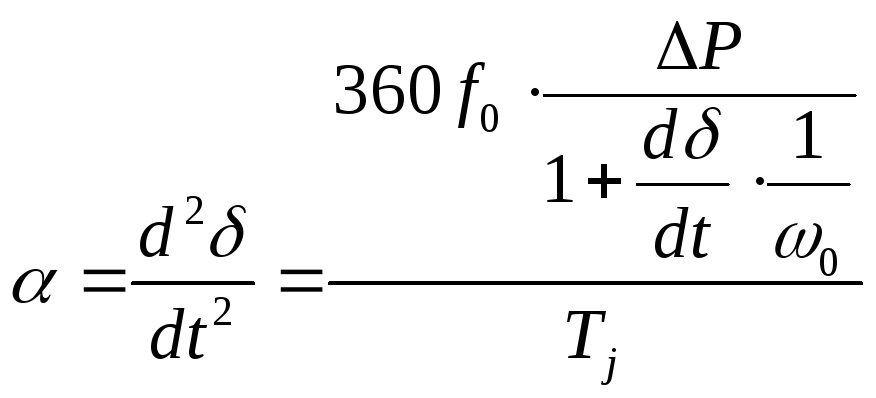
40. Метод последовательных интервалов. Этот метод применяется непосредственно для исследования простейшей электрической системы. Уравнение относительного движения СМ при небалансе момента турбины и электромагнитного момента запишем в виде
Приняв условие, что мощность численно равна моменту, вызывает незначительную погрешность. Однако, если
Предположим, что задача решена и зависимости определены
Разобьем весь процесс на малые интервалы времени ∆t и последовательно будем его рассматривать от интервала к интервалу. Если выберем одинаковые интервалы, то получим не одинаковые интервалы по углу. Каждый интервал хар-ся начальными значениями величин угла, скорости, ускорения и средними значениями скорости и ускорения, действующими в этом интервале. Выберем интервал достаточно малым, чтобы считать на его протяжении ускорение постоянным (∆t = 0,02-0,1 с). При расчёте вручную - ∆t = 0,05 с. В первом интервале начальная скорость = 0 и при постоянном ускорении равном α0 по рис. б.
Мощность и ее приращение ∆Р изменяется при изменении угла и времени. Если время изменилось на ∆t, а угол на ∆δ1, то можно определить ∆Р1, т.е. небаланс мощности в конце первого интервала (в начале второго).
На втором интервале изменение угла зависит от скорости ∆ω1, которую ротор получил в первом интервале и ускорение α1, действующего в начале второго интервала и обусловленного избыточной мощностью ∆Р1. Тогда ∆δ2 = ∆ω1∆t + 0,5α1∆t2. Значение скорости на протяжении первого интервала не постоянна. Определим ее приращение по среднему ускорению ∆ω1=0,5(α0 + α1)∆t; ∆δ2 = 0,5(α0+ α1)∆t2 + 0,5α1∆t2 = 0,5 α0∆t2 + α1∆t2; ∆δ2 = ∆δ1 + α1∆t2. По аналогии определяется выражения для приращения угла в третьем и т.д. интервале. ∆δ1 = К*0,5∆Р0; ∆δ2=∆δ1 + К*0,5∆Р1; ∆δn = ∆δn-1 + К*0,5∆Рn; где К = (360f0∆t2)/Tj. Рассмотрим дальнейшее изменение системы.
При отключении части генераторов, поврежденной линии и т.п., когда избыток мощности ∆Рn-1 внезапно изменяется до величины ∆Р’n-1 (рис. а и б), определение приращения угла в n-м интервале производится по формуле:
42. Процессы в узлах нагрузки электрических систем при больших возмущениях 1) Влияние больших возмущений на режим узлов нагрузки. Характерными большими возмущениями влияющими на режим узлов нагрузки является 1 пуск двигателей – пуск мощных двигателей особенно с двигателями с КЗ ротором которые имеют большие пусковые токи в этом случае пусковой режим оказывает существенное влияние на режим энергосистемы и при соизмеримой мощности двигателей и г-ров системы проверка пуска двигателей на режим системы должна проводится в обязательном порядке. 2) Осуществление АВП и переключение источников питания. На мощных высоковольтных линиях могут происходить так называемые преходящие КЗ появившись в силу какой - нибудь случайной причины. Такое КЗ самоликвидируется при отключении аварийного участка и этот участок снова включаются в работу с немощного АПВ в нормальный режим. При выходе из строя источников питания трансформаторов питающимся от него двигатель и другие потребители одновременно переключаются на другой источник питания. Если не принять специальных мер, то в узле энергетической системы появится большой ток и и соответственно большое U. Это приведет к снижению вращающего момента у двигателей которые работали в результате устойчивость нагрузки может нарушиться. 3) Самозапуск двигателей происходит по каким то причинам кратковременное отключение всей нагрузки в узле а затем U в узле восстанавливается если нагрузка при этом не была отключена, но значительно затормозившиеся двигатели снова запускаются поэтому необходимо рассчитывать условия самозапуска так, что бы вся система не испытывала снижение U и f. 4) Резкие толчки тока в системе из-за существования в сети мощных нагрузок которые вызывают резкие толчки тока это например прокатные станы и мощные установки работающие в повторно – кратковременных режимах.
|
43. Пуск двигателей, уравнение движения при пуске и его интегрирование. АД. ∆М = М-Ммех= -ТjdS/dt, где М- эл. маг. момент; Ммех- момент сопротивления рабочего механизма; Тj – постоянная инерции агрегата. Пуск АД. Ммех= f(S), предположим что М и Ммех не зависят от времени и ускорением, определяются скольжением (S), тогда можно построить статические характер-ки.
Урав-е движения на любом интервале: ∆Мi= ТjdSi/dti, время от начала момента пуска Д-ля до конца i-го интервала, при Ммех=const (частн. сл.)
Где Вс=В/Ммех, общее время разбега (Вс>1) от ω1 до ω2 и выбега(Вс<1):
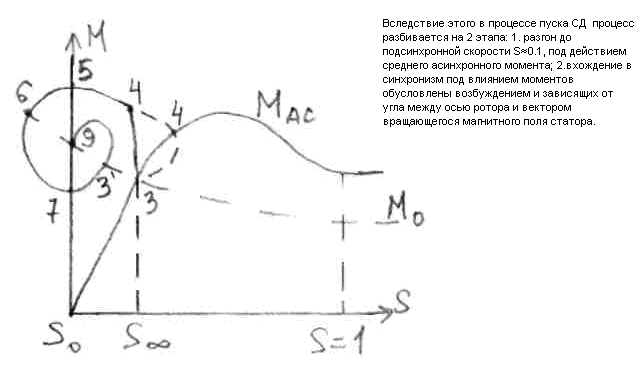
44. Пуск синхронных двигателей СД подключаются к сети не возбуждёнными, их обмотки возбуждения при этом коротко замкнуты на сопротивление R=(5-10)Rf. Разгоняясь как АД, они достигают скорости близкой к синхронной. После этого на обмотку возбуждения подаётся U и двигатель втягивается в синхронизм.
В следствии этого в процессе пуска СД процесс разбивается на 2 этапа: 1.разгон до подсинхронной скорости S≈0.1, под действием среднего асинхронного момента; 2. вхождение в синхронизм под влиянием моментов обусловлено возбуждением и зависящих от угла между осью ротора и вектором вращающегося магнитного поля статора. На первом этапе пуска существенным является начальный толчок тока статора и длительность разгона до подсинхронной скорости. Мпуск=(30-40)%МН- облехчённый пуск Мпуск=(80-100)%МН- нормальный пуск Мпуск=(110-120)%МН- тяжелый пуск. Начальный толчок периодической слагающей тока статора I=U/X”dΣ. Длительность разгона до подсинхронной скорости м/б определено также как и для АД или по графоаналитическими методами. На втором этапе пуска на несинхронно вращающийся ротор начинает действовать синхронный момент зависящий от угла δ и обусловленная возбуждением и моментом сопротивления механизма. После подачи возбуждения на обмотку ротора у двигателя создается знакопеременный момент который существует и в явнополюсной машине при отсутствии возбуждении за счет неравномерности магнитной проводимости по продольной и поперечной осям ротора. Момент явнополюсности: МЯВН=(U2/2)*(( Хd - Х`d)/( Хd * Х`d)) В этот момент на ротор действует и составляющая асинхронного момента. Иногда втягивание в синхронизм может произойти и без подачи возбуждения за счёт момента явнополюсности при явнополюсном роторе.
|
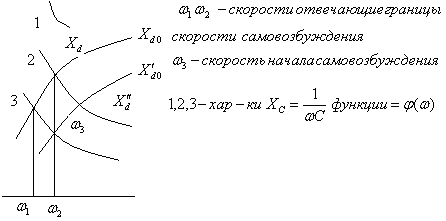
45. Самовозбуждение АД во время пуска при применении последовательной емкостной компенсации в сети. Эффективным средством ↓ потерь UC Является продольная (последовательная) емкостная компенсация реактивного сопротивления сети питающий двигатель. При этом может возникнуть явление качания СМ и «застревания» АД на скоростях меньше нормальной, самовозбуждение при пуске АД или при асинхронном пуске СД. Может также появиться субгармонические составляющие токов, которые не имеют существенные назначения для местных сетей. Будем считать, что АД также как и турбогенераторы хар-ся реактивным сопротивлением Х`d и Хd .При изменении скорости вращения двигателя ώ его реактивное сопротивление меняется. Емкостное сопротивление ХС=1/ ώС также изменяется, причем хар-ка ХС=f(ώ) может различно располагаться относительно области Х`d и Хd .
1-самовозбуждение(↑ ICT) во время пуска не будет; 2- она должна быть вплоть до нормального режима; 3- во время пуска на интервале от ώ1 до ώ2 появиться самовозбуждение которое может исчезнуть если двигатель быстро проскочит зону самовозбуждения. Самовозбуждение является не желательным явлением, т.к: 1. ток статора и мощность потребляемая из сети могут в несколько раз превышать ном. значения. Появляется сильный перегрев двигателя, ↓ U на шинах и ↓ вращающий момент. 2. Двигатель во время пуска может « застревать», недостигнув нормал. скорости. 3. При « застревании» двигателя появляются биение I и M и как следствии качание ротора машины. Рассмотрим физику процесса: во время разбега двигателя замещающее его сопротивление по мере его скорости возрастает от min до max (Х``d и Хd). При некотором значении скольжении ротора индуктивность двигателя может резонировать с емкостью последовательной компенсации т.е. создать контур самовозбуждения с собственной частотой ниже 50 Гц. Двигатель при этом вращается со скоростью соответствующей собственной частоте колебательного контура. Источником энергии, поддерживающим колебательный процесс контура является сам АД. Во время разгона скорость ротора достигает величины соответствующий величины частоте собственного колебательного контура и превышает её. Создается отрицательное скольжение ротора по отношению к резонансной частоте и АД как бы переходит в режим генератора по отношению к контуру самовозбуждения. Скорость вращения зависит от потерь в контуре ротора с учетом насыщения стального двигателя. При равенстве этих потерь и генерирующей мощности создаётся возможность устойчивой работы двигателя в этом режиме. Если потери превышают мощность АД, то самовозбуждение либо не возникает или получается неустойчивым, не мешая двигателю разгоняться до нормальной скорости. Самовозбуждение устраняется выбором соответствующей величины емкости продольной компенсации либо последовательной или параллельном включении с ёмкостью активного сопротивления.
46. Изменение частоты и мощности в энергосистемах. В ЭС состоящей из ряда станций различают следующие изменения частоты: - быстрые и средние, происходят во время пп, связаны с изменением скорости г-ров под влиянием небалансов невращающих моментов на валах г-ров. - медленные харавтерно для системы в целом из-за инерции всех машин системы и действия АРЧВ и АРЧ. Рассмотрим быстрое изменение: При балансе момента, мощности на валу каждого г-ра. Мк=Ммех.к. k=1,2,...n и вращение ротора каждого генератора со скоростью ωк=ωо. Токи и напряжения изменяются с частотой fо= ωо/2п во время работы может возникнуть небаланс м/у мощностью и потребителем нагрузки и мощностью отдаваемой генератором. ▲М=Ммех-М следовательно возникнет изменение скорости генератора
и соответственно мгновенной частоты
Т.о. на 1 этапе происходит снижение или увеличение средней частоты в системе. Возникают качания г-ров относительно друг друга и за счет синхронных сязей происходит изменения значений мгновенных изменений частоты отдельных станций. Медленные изменения – f достигает значения выходящую за пределы зоны нечувствительности АРЧВ, которые вступают в работу и перераспределяют доп. нагрузку. Затем влияние оказывает медленнее действующий АРЧ, изменяют уставки первичных регуляторов регулирующих частоту на станциях которая принемает на себя небаланс мощностей и при наличии достаточного резерва мощности частота в системе восстанавливается до нормального значения. Время действия АРЧ несколько десятков секунд и процесс регулирования f считают медленным. Это позволяет в реальных случаях рассматривать эти процессы раздельно. Т.о. процесс изменения частоты в системе небаланса мощностей м/о описать следующим образом 1) Относительно быстрые электромагнитные и электромеханические пп при которых АРЧВ и АРЧ не действуют. 2) Электромеханические пп средней скорости при действии регуляторов АРЧВ. 3) Медленные пп происходящие при действии АРЧ. Рассматривая 2 и 3 стадию пп м/о исходить из того что уст. отключение f в системе зависит от баланса мощности в виде
δк=1/Кк – статизм агрегата. чем больше тем меньше отключение частоты при данном изменении мощности. Мгновенное изменение частоты для каждого генератора начале различны а после пп становятся одинаковыми.
Суммарное изменение
мощности в системе м/о записать в виде:
К∑ - суммарная энергия регулирования Характер выравнивания частоты, изменение ее значений в отдельной точке системы после возмущения зависят главным образом от параметров элементов входящих в систему.
|