

3.2. Принцип относительности классической механики
Предположим,
что подвижная система отсчета движется
поступательно, равномерно и прямолинейно.
При этом угловая скорость
![]() и угловое ускорение
и угловое ускорение![]() подвижной системы координат, а также
ускорение ее начала
подвижной системы координат, а также
ускорение ее начала![]() равны нулю. Следовательно, равны нулю
переносное
равны нулю. Следовательно, равны нулю
переносное![]() ,
кориолосово
,
кориолосово![]() ускорения и обе силы инерции
ускорения и обе силы инерции![]() ,
,![]() .
Теперь уравнение (3.5) примет вид:
.
Теперь уравнение (3.5) примет вид:
![]() .
(3.7)
.
(3.7)
Сравнивая уравнения (3.1) и (3.7), приходим к выводу о том, что в рассматриваемом случае последнее уравнение, определяющее относительное ускорение материальной точки, совпадает с основным уравнением динамики (3.1), определяющим ее абсолютное ускорение. Таким образом, движение материальной точки относительно системы отсчета, движущейся поступательно, равномерно и прямолинейно, происходит так же, как и относительно неподвижной системы отсчета, т.е. подвижная система является инерциальной.
Действительно,
если правая часть уравнения (3.7) равна
нулю, то из него получим
![]() ,
откуда следует, что точка движется
равномерно и прямолинейно, т.е. выполняется
1-й закон динамики. Так как законы динамики
одинаковы во всех инерциальных системах
отсчета, никакие механические эксперименты,
проводимые в инерциальной системе
отсчета, не могут обнаружить, находится
ли она в покое или движется поступательно,
равномерно и прямолинейно. В этом состоит
открытый Галилеем принцип относительности
классической механики.
,
откуда следует, что точка движется
равномерно и прямолинейно, т.е. выполняется
1-й закон динамики. Так как законы динамики
одинаковы во всех инерциальных системах
отсчета, никакие механические эксперименты,
проводимые в инерциальной системе
отсчета, не могут обнаружить, находится
ли она в покое или движется поступательно,
равномерно и прямолинейно. В этом состоит
открытый Галилеем принцип относительности
классической механики.
3.3. Условия относительного покоя. Сила тяжести
Пусть
материальная точка под действием
приложенных к ней сил находится в
состоянии относительного покоя, т.е. не
движется относительно подвижной системы
отсчета Oxyz. В этом
случае относительная скорость![]() и относительное ускорение
и относительное ускорение![]() точки равны нулю, следовательно, равна
нулю и кориолисова сила инерции
точки равны нулю, следовательно, равна
нулю и кориолисова сила инерции![]() .
Уравнение относительного покоя получим
из уравнения (3.5)
.
Уравнение относительного покоя получим
из уравнения (3.5)
![]() .
(3.8)
.
(3.8)
Таким образом,
если материальная точка находится в
состоянии относительного покоя,
геометрическая сумма действующих на
нее сил и переносной силы инерции равна
нулю. Следует отметить, что выполнения
условия (3.8) не означает, что после
сообщения точке начальной скорости она
будет двигаться равномерно и прямолинейно
относительно подвижной системы, как
это имеет место в инерциальной системе
отсчета. Действительно, при появлении
относительной скорости, во-первых,
возникает кориолисово ускорение
![]() и кориолисова сила инерции
и кориолисова сила инерции![]() ,
во-вторых, может измениться переносное
ускорение, зависящее от положения точки
в подвижной системе отсчета, что приведет
к изменению переносной силы инерции
,
во-вторых, может измениться переносное
ускорение, зависящее от положения точки
в подвижной системе отсчета, что приведет
к изменению переносной силы инерции![]() .
Таким образом, правая часть уравнения
(3.5) будет отлична от нуля, и точка будет
иметь относительное ускорение
.
Таким образом, правая часть уравнения
(3.5) будет отлична от нуля, и точка будет
иметь относительное ускорение![]() .
.
Рассмотрим в качестве примера материальную точку М, подвешенную на нити и находящуюся в покое относительно Земли (рис. 3.3). Запишем условие относительного покоя (3.8) и получим
![]() ,
(3.9)
,
(3.9)
где
![]() – реакция нити;
– реакция нити;![]() – сила притяжения Земли, направленная
к ее центру;
– сила притяжения Земли, направленная
к ее центру;![]() – переносная сила инерции, которая
вследствие равномерного вращения Земли
имеет только центробежную составляющую,
направленную от ее оси вращения. Модуль
силы инерции
– переносная сила инерции, которая
вследствие равномерного вращения Земли
имеет только центробежную составляющую,
направленную от ее оси вращения. Модуль
силы инерции
![]() ,
,
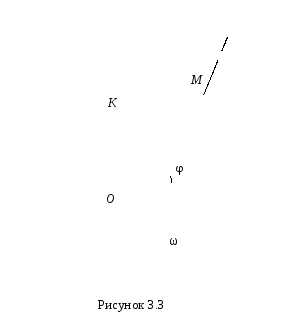
где ρ = МК– радиус географической
параллели;R– радиус
Земли; ω – угловая скорость вращения
Земли; φ – геоцентрическая широта. Силу,
равную по модулю и направленную
противоположно реакции![]() ,
называютсилой тяжестии обозначают
через
,
называютсилой тяжестии обозначают
через![]() .
Таким образом, сила тяжести равна
геометрической сумме силы притяжения
.
Таким образом, сила тяжести равна
геометрической сумме силы притяжения![]() и силы инерции
и силы инерции![]() ,
вызванной вращением Земли:
,
вызванной вращением Земли:
![]() .
.
Направление
силы тяжести
![]() определяет направление вертикали в
данной точке земной поверхности, а
плоскость, перпендикулярная силе
определяет направление вертикали в
данной точке земной поверхности, а
плоскость, перпендикулярная силе![]() ,
является горизонтальной.
,
является горизонтальной.
Сила инерции
![]() очень мала по сравнению с силой тяжести,
что видно из отношения их модулей
очень мала по сравнению с силой тяжести,
что видно из отношения их модулей
![]() .
.
Оно максимально
на экваторе (1/290) и равно нулю на полюсе.
Отклонение линии отвеса от направления
радиуса Земли максимально на широте
450и составляет![]() .
Таким образом, сила тяжести
.
Таким образом, сила тяжести![]() и по модулю, и по направлению мало
отличается от силы притяжения
и по модулю, и по направлению мало
отличается от силы притяжения![]() .
Ускорение свободного паденияgмаксимально на полюсе (9,83 м/с2) и
минимально на экваторе (9,78 м/с2).
.
Ускорение свободного паденияgмаксимально на полюсе (9,83 м/с2) и
минимально на экваторе (9,78 м/с2).
Пример.Тело массойmнаходится на гладкой наклонной грани призмы, движущейся по горизонтальной поверхности, как показано на рис. 3.4.

Определить:
1) Каким должно быть ускорение призмы, чтобы тело не двигалось относительно нее?
2) Каково давление тела на призму, если угол наклона равен α?
На тело
действуют сила тяжести
![]() и нормальная реакция
и нормальная реакция![]() гладкой плоскости. Условно приложим к
телу переносную силу инерции, модуль
которой
гладкой плоскости. Условно приложим к
телу переносную силу инерции, модуль
которой![]() ,
и запишем для полученной системы сил
уравнение равновесия
,
и запишем для полученной системы сил
уравнение равновесия
![]() .
.
Спроецируем его на оси xиyподвижной системы координат:
![]() ;
(3.10)
;
(3.10)
![]() .
(3.11)
.
(3.11)
Теперь получим:
из уравнения (3.10)
![]() ,
откуда
,
откуда![]() ;
;
из уравнения (3.11)
![]()
![]()