

6.2. Теорема об изменении кинетического момента
материальной точки
Продифференцируем по времени соотношение (6.1)
![]() .
(6.10)
.
(6.10)
Учтем, что
![]() как векторное произведение коллинеарных
векторов, а в соответствии с выражением
(1.2)
как векторное произведение коллинеарных
векторов, а в соответствии с выражением
(1.2)![]() ,
и из равенства (6.10) получим
,
и из равенства (6.10) получим
![]() .
.
Таким образом доказана следующая теорема.Производная по времени от кинетического момента материальной точки относительно неподвижного центра равна сумме моментов всех сил, действующих на точку, относительно того же центра:
![]() .
(6.11)
.
(6.11)
Рассмотрим в качестве примера
использования данной теоремы движение
материальной точки под действием
центральной силы, т.е. силы, линия действия
которой постоянно проходит через
некоторую точку, неподвижную в данной
инерциальной системе отсчета. Пусть
линия действия центральной силы
![]() все время проходит через неподвижную
точкуО(рис. 6.3), тогда
все время проходит через неподвижную
точкуО(рис. 6.3), тогда![]() и из соотношения (6.11) следует, что
и из соотношения (6.11) следует, что
![]()
 .
.
Таким образом,
![]() ,
а поэтому плоскость, проходящая через
вектор
,
а поэтому плоскость, проходящая через
вектор![]() и центрО, не изменяет своего положения
и траектория точки является плоской
кривой.
и центрО, не изменяет своего положения
и траектория точки является плоской
кривой.
6.3. Теорема об изменении кинетического момента
механической системы
Рассмотрим систему, состоящую из Nматериальных точек, и запишем для каждой из них соотношение (6.11)
![]() ,
,
где, как уже
отмечалось,
![]() – равнодействующие всех внешних и
внутренних сил, приложенных кj-й
точке системы.
– равнодействующие всех внешних и
внутренних сил, приложенных кj-й
точке системы.
Сложим почленно полученные уравнения:
![]() .
(6.12)
.
(6.12)
Из 2-го свойства
внутренних сил следует, что
![]() .
Преобразуя левую часть уравнения (6.12)
.
Преобразуя левую часть уравнения (6.12)
![]() ,
,
получим из него
![]() ,
(6.13)
,
(6.13)
где
![]() –
главный момент внешних сил системы
относительно центраО.
–
главный момент внешних сил системы
относительно центраО.
Итак, доказана следующая теорема.Производная по времени от кинетического момента механической системы относительно неподвижного центра равна главному моменту внешних сил системы относительно того же центра.
Векторному уравнению (6.13) соответствуют три уравнения в проекциях на оси координат:
![]() ,
(6.14)
,
(6.14)
где
![]() – главные моменты внешних сил относительно
осейx,y,z. Следует отметить,
что уравнения вида (6.14) рекомендуется
использовать при рассмотрении системы,
в состав которой входит тело, вращающееся
вокруг неподвижной оси. Тогда, совмещая
одну из координатных осей с осью вращения,
получим уравнение, не содержащее
неизвестных реакций опор вращающегося
тела.
– главные моменты внешних сил относительно
осейx,y,z. Следует отметить,
что уравнения вида (6.14) рекомендуется
использовать при рассмотрении системы,
в состав которой входит тело, вращающееся
вокруг неподвижной оси. Тогда, совмещая
одну из координатных осей с осью вращения,
получим уравнение, не содержащее
неизвестных реакций опор вращающегося
тела.
 Пример
1.ГрузА, спускаясь по гладкой
наклонной плоскости, приводит во вращение
барабанВпосредством намотанного
на него троса (рис. 6.4).
Пример
1.ГрузА, спускаясь по гладкой
наклонной плоскости, приводит во вращение
барабанВпосредством намотанного
на него троса (рис. 6.4).
Определить
зависимость угловой скорости барабана
от времени, если известны масса груза
![]() ,
момент инерции барабана
,
момент инерции барабана![]() относительно его оси вращенияz,
перпендикулярной плоскости рисунка,
радиус барабанаrи
угол наклона α плоскости к горизонту.
Массой троса пренебречь и учесть, что
в начальный момент времени система
находилась в состоянии покоя.
относительно его оси вращенияz,
перпендикулярной плоскости рисунка,
радиус барабанаrи
угол наклона α плоскости к горизонту.
Массой троса пренебречь и учесть, что
в начальный момент времени система
находилась в состоянии покоя.
На систему,
состоящую из груза А и барабанаВ,
действуют внешние силы: сила тяжести
груза![]() и сила тяжести барабана
и сила тяжести барабана![]() ,
нормальная реакция наклонной плоскости
,
нормальная реакция наклонной плоскости![]() и реакция оси барабана
и реакция оси барабана![]() .
Направим осьzвдоль
оси вращения барабана к нам и используем
.
Направим осьzвдоль
оси вращения барабана к нам и используем
3-е уравнение системы (6.14):
![]() .
(6.15)
.
(6.15)
Кинетический момент системы относительно оси zравен сумме кинетических моментов груза и барабана. Принимая поступательно движущийся груз за материальную точку, получим
![]() .
.
Так как
![]() ,
окончательно запишем
,
окончательно запишем
![]() .
(6.16)
.
(6.16)
Для определения
главного момента внешних сил относительно
оси zразложим силу![]() на составляющие
на составляющие![]() и
и![]() ,
направленные вдоль наклонной плоскости
и по нормали к ней. Силы
,
направленные вдоль наклонной плоскости
и по нормали к ней. Силы![]() и
и![]() равны по модулю и направлены вдоль одной
прямой в противоположные стороны,
поэтому сумма их моментов относительно
осиzравна нулю. Силы
равны по модулю и направлены вдоль одной
прямой в противоположные стороны,
поэтому сумма их моментов относительно
осиzравна нулю. Силы![]() и
и![]() не имеют моментов относительно осиz,
так как их линии действия пересекают
эту ось. Таким образом, главный момент
внешних сил относительно осиz
не имеют моментов относительно осиz,
так как их линии действия пересекают
эту ось. Таким образом, главный момент
внешних сил относительно осиz
![]() .
(6.17)
.
(6.17)
Теперь подставим (6.16) и (6.17) в уравнение (6.15)
![]() ,
,
откуда получим
![]() .
.
Проинтегрируем это дифференциальное уравнение, учитывая пределы изменения переменных:
![]() ;
;
![]() .
.
Сформулируем следствия из этой теоремы:
1) внутренние силы не влияют непосредственно на изменение кинетического момента механической системы, а их косвенное влияние осуществляется через внешние силы (см. замечание в подразделе 5.5);
2) если главный момент внешних сил
относительно некоторого неподвижного
центра на рассматриваемом промежутке
времени равен нулю, то кинетический
момент системы относительно этого
центра остается постоянным. Положив в
уравнении (6.13)
![]() ,
получим, что
,
получим, что
![]() и
и![]() ;
;
3) если главный
момент внешних сил относительно некоторой
неподвижной оси на рассматриваемом
промежутке времени равен нулю, то
кинетический момент системы относительно
этой оси остается постоянным. Действительно,
если
![]() ,
то из 1-го уравнения (6.14) получим
,
то из 1-го уравнения (6.14) получим![]() и
и![]() .
.
Второе и третье следствия выражают закон сохранения кинетического момента механической системы.
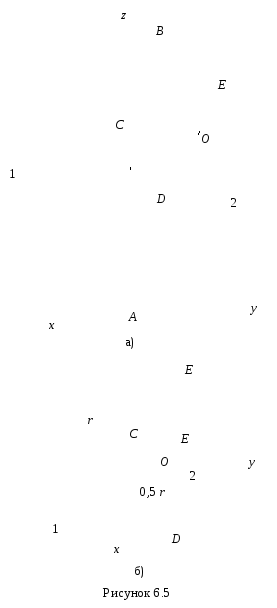
Пример 2.В точкеDобода однородного диска 1, вращающегося
вокруг неподвижной вертикальной оси с
угловой скоростью![]() ,
находится точечный груз 2, масса которого
в два раза меньше массы диска (рис.
6.5а.). В некоторый момент времени груз,
являющийся самоходным механизмом,
начинает двигаться по хордеDЕ.
Радиус диска равенr,СО= 0,5r.
,
находится точечный груз 2, масса которого
в два раза меньше массы диска (рис.
6.5а.). В некоторый момент времени груз,
являющийся самоходным механизмом,
начинает двигаться по хордеDЕ.
Радиус диска равенr,СО= 0,5r.
Определить угловую скорость диска
![]() при прохождении груза через середину
хордыО, если в этот момент скорость
груза относительно диска равна
при прохождении груза через середину
хордыО, если в этот момент скорость
груза относительно диска равна![]() (рис. 6.5б). Силами сопротивления пренебречь.
(рис. 6.5б). Силами сопротивления пренебречь.
 Рассмотрим
систему, состоящую из диска 1 и груза 2.
На нее действуют внешние силы: сила
тяжести диска
Рассмотрим
систему, состоящую из диска 1 и груза 2.
На нее действуют внешние силы: сила
тяжести диска![]() ,
сила тяжести груза
,
сила тяжести груза![]() и составляющие реакций опор
и составляющие реакций опор![]()
![]() .
Моменты всех этих сил относительно осиzравны нулю, поэтому
главный момент внешних сил
.
Моменты всех этих сил относительно осиzравны нулю, поэтому
главный момент внешних сил![]() и кинетический момент системы относительно
осиz не изменяется,
т.е.
и кинетический момент системы относительно
осиz не изменяется,
т.е.![]() .
Следовательно,
.
Следовательно,![]() ,
где
,
где![]() – начальный и конечный кинетические
моменты системы, соответствующие
положениям груза в точкахDиO.
– начальный и конечный кинетические
моменты системы, соответствующие
положениям груза в точкахDиO.
В начальный момент времени диск и груз представляют собой одно тело, вращающееся вокруг оси z, поэтому
![]() ;
;
![]() ;
;
![]() .
(6.18)
.
(6.18)
В конечный момент времени кинетический момент системы равен сумме кинетических моментов диска и груза:
![]() ,
(6.19)
,
(6.19)
где
![]() – абсолютная скорость груза,
– абсолютная скорость груза,![]() .
Относительная
.
Относительная![]() и переносная
и переносная![]() скорости груза в точкеОнаправлены
вдоль хордыDE,
скорости груза в точкеОнаправлены
вдоль хордыDE,
![]() ;
;

Из равенства (6.19) следует, что
![]() .
(6.20)
.
(6.20)
Приравнивая правые части равенств (6.18) и (6.20)
![]() ,
,
получим
![]() .
.