

5.7. Теорема о движении центра масс механической системы
Преобразуем равенство (5.14), подставив в него количество движения системы в виде (5.3)
![]() .
.
Учитывая, что масса системы постоянна, получим
![]()
или
![]() .
(5.22)
.
(5.22)
Сравнивая это уравнение с основным уравнением динамики точки (1.2), приходим к следующей формулировке теоремы о движении центра масс:Центр масс механической системы движется как материальная точка, в которой сосредоточена вся масса системы и к которой приложены все внешние силы, действующие на систему.
Спроецируем уравнение (5.22) на оси неподвижной декартовой системы координат и получим дифференциальные уравнения движения центра масс:
![]() .
(5.23)
.
(5.23)
Сформулируем следствия из теоремы.
1) Внутренние силы не влияют непосредственно на движение центра масс системы, но могут оказывать косвенное влияние через внешние силы (см. замечание, приведенное в 1-м следствии подраздела 5.5).
2) Если главный вектор внешних сил, действующих на систему, на рассматриваемом интервале времени равен нулю, то центр масс системы находится в покое или движется равномерно и прямолинейно.
Положим в уравнении (5.22)
![]() ,
тогда ускорение центра масс
,
тогда ускорение центра масс![]() ,
т.е. его скорость
,
т.е. его скорость![]() .
При этом, если начальная скорость центра
масс
.
При этом, если начальная скорость центра
масс![]() ,
то центр масс находится в покое, а если
,
то центр масс находится в покое, а если![]() ,
то центр масс движется равномерно и
прямолинейно с этой скоростью.
,
то центр масс движется равномерно и
прямолинейно с этой скоростью.
3) Если проекция главного вектора внешних сил системы на некоторую неподвижную ось на рассматриваемом интервале времени равна нулю, то проекция скорости центра масс системы на эту ось не изменяется.
Положив в
1-м уравнении (5.23)
![]() ,
получим, что
,
получим, что![]() ,
т.е.
,
т.е.![]() .
Если при этом в начальный момент времени
проекция скорости центра масс
.
Если при этом в начальный момент времени
проекция скорости центра масс![]() ,
то
,
то![]() ,
т.е. центр масс не движется вдоль осих.
Остановимся на этом случае подробнее.
Предположим, что в начальный момент
времени
,
т.е. центр масс не движется вдоль осих.
Остановимся на этом случае подробнее.
Предположим, что в начальный момент
времени![]() абсциссы точек системы были равны
абсциссы точек системы были равны![]() ,
а в момент времени
,
а в момент времени![]() стали равны
стали равны![]() .
Поскольку в рассматриваемом случае
.
Поскольку в рассматриваемом случае![]() ,
из формул (4.3), определяющих координаты
центра масс, следует
,
из формул (4.3), определяющих координаты
центра масс, следует
![]() ,
,
откуда после преобразований получим
![]() .
(5.24)
.
(5.24)
Продолжим изучение движения системы, рассмотренной во 2-м примере подраздела 5.5.
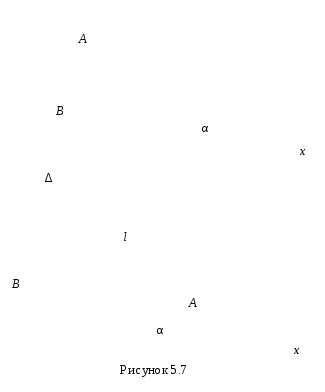
Пример 5.Определить перемещение Δ клинаВза то время, в течение которого грузА, двигаясь по наклонной плоскости, проходит вдоль нее расстояниеl.
Как уже было
показано, при движении груза Авниз
по наклонной плоскости клинВперемещается влево (рис 5.7, где вверху
показано начальное, а внизу – конечное
положение системы). Так как проекция
главного вектора внешних сил системы
на осьхравна нулю и вначале система
была неподвижна, а значит проекция
начальной скорости центра масс![]() ,
при движении системы координата
,
при движении системы координата![]() не изменяется и выполняется соотношение
(5.24). В этом соотношении
не изменяется и выполняется соотношение
(5.24). В этом соотношении![]() – приращения координат центров масс
телАиВ, которые измеряются в
неподвижной системе координат:
– приращения координат центров масс
телАиВ, которые измеряются в
неподвижной системе координат:
![]() ,
,![]() .
.
Уравнение (5.24) теперь примет следующий вид:
![]() или
или![]() ,
,
откуда получим
![]() .
.
Зафиксируем
клин В, поставив упорD,
и определим реакцию упора![]() ,
действующую на клин (рис. 5.8). Так как
клин теперь не имеет возможности
перемещаться, центр масс системы при
движении грузаАбудет изменять
свое положение. Запишем уравнение
движения центра масс системы в проекциях
на осьх:
,
действующую на клин (рис. 5.8). Так как
клин теперь не имеет возможности
перемещаться, центр масс системы при
движении грузаАбудет изменять
свое положение. Запишем уравнение
движения центра масс системы в проекциях
на осьх:
![]() ,
(5.25)
,
(5.25)
где
![]() .
.
И з
формул (4.3) получим
з
формул (4.3) получим
![]() .
.
Дважды продифференцировав это равенство, запишем
![]() .
.
Т ак
как
ак
как![]() ;
;![]() ;
;![]() ,
где
,
где![]() – ускорение груза, которое определим,
записав уравнение движения груза в
проекциях на ось
– ускорение груза, которое определим,
записав уравнение движения груза в
проекциях на ось![]() (рис. 5.9)
(рис. 5.9)![]() .
Из этого уравнения получим
.
Из этого уравнения получим
![]()
Окончательно из уравнения (5.25) найдем
![]()
=![]() .
.