

РД1 Лекции жрд 2017
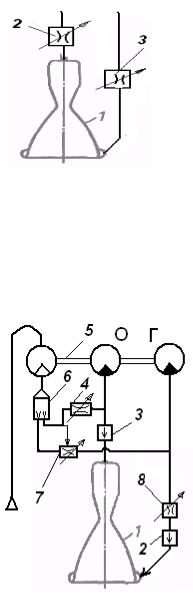
.pdfРисунок 2.19. 1 – основной режим: 2 – конечный режим; 3 – ИПТ – при останове на основном режиме; 4 – ИПТ – при останове на промежуточном режиме
ДУ.
В ДУ с НПТ из-за насосов ТНА (может быть кавитация) останов по минимому топлива в баках, закрытием главных клапанов, одновременно прекращается подача топлива в ЖГГ. Для уменьшения гидроудара целесообразно выключить ЖГГ – раньше, чем закрываются Главные клапаны и выключаются камеры
2-ой и 3-ий способы применяют, когда момент включения определяется целевыми условиями.
Порядок работы агрегатов при останове ЖРДУ
1.При необходимости, перевести двигатель на режим конечной ступени.
2.Выключение ТНА (для НПТ)
3.Выключение наддува баков
4.Выключение камеры ДУ (включение продувки к. двигателя)
ИПТ – из-за догорания топлива, оставшиеся в головке камеры сгорания. Для ↓ ИПТ – клапаны конечные
1)ставят на головке камеры. ДУ
2)выдувание остатков компонентов продувкой.
2.3.5.3. Система управления двигателя на основном режиме работы
Способы управления тягой ДУ.
Режим работы двигателя характеризуется тягой Р, которая важна для ЛА, которые во время полета маневрируют.
Управление тягой Р = Jу m может выполняться:
1) изменением Jу, что не желательно (изменяется Кm и ↓ экономичность, поэтому Кm=const).
41
Поэтому основной способ управления тягой – это изменение m при
Кm=const.
В ЖРД с ВПТ
|
Рб |
= idem |
управление путем установки в |
|||
|
магистрали компонентов перед КС регулируемых |
|||||
|
дросселей |
«О» |
«Г» с |
сервоприводом. |
При этом |
|
|
Jу=const →Кm=const, m= переменное |
|
||||
|
В ЖРД с НПТ без дожигания |
|
||||
Рисунок 2.20. ВПТ |
Р = |
idem |
путем |
изменения nТНА |
(частоты |
|
|
||||||
1 –камера; 2 – дроссель О; |
вращения ТНА), для чего: 1) В магистрали подачи |
|||||
3 – дроссель Г |
|
|
|
|
|
|
топлива в восстановительный ЖГГ ставят регулируемые дроссели
Кmгг=const Trr=const
1)Регулятор подачи "О" 4 в ЖГГ.
2)Стабилизатор соотношения компонентов 7
вГГ.
3)Тяга изменяется Р = + 15%
–30%
ЖРД с НПТ с дожиганием
|
Управление |
тягой |
осуществляется |
путем |
|||
|
программного |
изменения |
соотношения |
||||
|
компонентов |
и |
температуры газов в ЖГГ, для |
||||
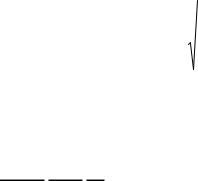
Рисунок 2.21. Схема ЖРД |
этого ставят дроссель 4 в магистраль компонента с |
||||||
без дожигания продуктов |
|||||||
|
|
|
|
|
|
||
газогенерации: |
минимальным расходом (Г). Кроме программного |
||||||
1 – камера; 2, 3 – клапаны; |
|||||||
4 – регулятор тяги; 5 – ТНА; |
изменения |
тяги в |
ЖРДУ |
предусмотрено |
|||
6 – ЖГГ; 7 – регулятор |
|||||||
соотношения компонентов |
оперативное ее |
изменение по |
сигналу |
системы |
|||
ЖГГ; 8 – регулятор СОБ |
|||||||
РКС (Кажущаяся скорость – Vкаж - ∫ от кажущегося
ускорения ак=a – g). Если кажущееся ускорение ак изменилось по отношению к программному, то подается сигнал на дроссель 4
42

на изменение тяги ДУ по схеме
Система совместного (синхронного) опорожнения баков (СОБ)
Кроме изменения величины тяги, в ЛА с большим запасом топлива стремятся обеспечить одновременное опорожнение баков.
При этом будет получена минимальная конечная масса ЛА – (µ=max).
Для этого существует система синхронного опорожнения баков (СОБ), датчики которой – уровнемеры расположены в топливных баках, а исполнительные устройства – дроссели СОБ расположены в ЖРД.
В результате работы системы СОБ режим работы камеры изменяется (Кm в камере может отклоняться от расчетного значения), а с/с
изменения тяги ДУ должна ↑ Р, или ↓ до расчетного значения.
Рисунок 2.23. Структурная схема управления тягой ДУ
2.3.6. Система автоматического регулирования параметров ДУ
Основными регулируемыми параметрами ДУ – Р (тяга) и соотношение компонентов в камере Кm.
Перед сдачей двигателя настраивают его на заданные значения параметров (Р и Jy) путем постановки дроссельных шайб и настроек агрегатов ПГС. Однако на работу ДУ влияют случайные факторы (Т компонентов, ДЛА и др.).
43
Поэтому применяют систему автоматического регулирования (САР), которая характеризуется наличием обратной связи по регулируемому
параметру.
Система регулирование тяги Р – в качестве измерителя может
использоваться рк камеры сгорания рк = nР. Его сравнивают рк – р заданным и
выдают команду на дроссель управления ЖГГ ТНА.
С/с регулирования соотношения компонентов позволяет поддерживать Кm
в допустимых пределах, обеспечивая максимальный Jy=max.
Датчики этой с/с – расходомеры в магистралях подачи топлива,
исполнитель – дроссель 2 в схеме ЖРД с НПТ с дожиганием. |
|
|
Внимание! СОБ и С/С регулирования |
Кm в камере |
– |
НЕСОВМЕСТИМЫ, т.е. используют или одну, или другую. |
|
|
- С/с-му СОБ применяют на I-х ступенях |
ракетоносителей, |
т.к. |
Vид = f(Jy, к), что к>е, то Vид больше всего зависит от изменения величины к,
чем от изменения Jy на ту же величину. Поэтому в ДУ ракетоносителя включают с/с-му СОБ.
- Если к<е (основание натурального логарифма) (ДУ самолетов, космических ЛА), то влияние относительного изменения Jу на Vид больше, чем
к, поэтому применяют систему регулирования Кm в камере ДУ.
Применяют датчики, объемные расходомеры подачи топлива в камеру и датчики давления и температуры компонентов на входе в расходомеры. По их показаниям вычисляется Кm..
___________________________________________________________________
Лекция 5
2.3.7. Характеристики ЖРД
Характеристикой двигателя называется зависимость выходных параметров двигателя от внутренних и внешних параметров.
Если зависимости определяются при работе ДУ на установившемся режиме, то характеристики – статические.
44
mmax – ограничена прочностью камеры. |
|
|
|
|
|
|
|
|
|
||||||||||||
Тяга Р и |
Jy – f (m). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
I. |
Pн |
= 0; |
|
Кm=const; |
|
|
|
|
|
|
|
|
|
||||||||
Тяга камеры в пустоте Pn = Jyп • m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Удельная тяга камеры в пустоте Jуп = |
|
Pn |
= Jрру |
+ |
PaFa |
|
= const. |
||||||||||||||
|
|
|
m |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
m |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k −1 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
2k |
|
|
|
p |
|
k |
|||||||
|
|
|
|
|
|
|
|
RT 1 |
|
а |
|
||||||||||
|
|
|
|
|
Jy pp = Ca = |
|
|
|
|
− |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
k −1 |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
pк |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
II. |
Pн |
≠ 0; |
|
Кm=const; Pн= const |
|
|
|||||||||||||||
Тяга камеры: Р = m Ca + Fa (Pa – Pн);
Р = (m Ca + Fa Pa) – Fa Pн = Pп – Fa Pн
тяга в пустоте
Удельная тяга камеры |
J у = J уп − |
ра Fа |
|
m |
|||
|
|
I
I
II
II
45
|
|
|
|
I |
рн= 0 |
|
|
|
Pn= Jy • m |
||
|
Jyn=const P ~ m; |
||||
|
|
|
|
II |
рн ≠ 0 |
|
|
P = Pn – рн • Fa |
|||
|
J = J |
|
− |
рн Fa |
|
|
n |
m |
|
||
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
Комментарии: |
|
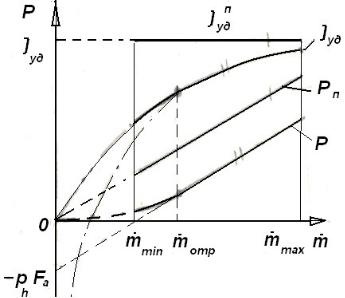
Рисунок 2.24. Дроссельная характеристика |
Кm=const; Pн= const |
||||
ЖРД |
I. рн = 0 |
|
|||
|
|
||||
При ↑ m в диапазоне mmin и mmax Pn↑ линейно от m, а Jyn=const (см. I)
(на участке 0…mотр –теоретическое представление, вычисление)
II. рн ≠ 0
При ↑ m в диапазоне mmin и mmax Pn↑ линейно, но P<Pn – частый пунктир
из точки – PнFa и сплошная P от m=mmin.
Вдействительности на участке ↑ m от 0… mотр по кривой, выходящей из начала координат (пунктир + сплошная линия).
Теоретически гипербола с асимптотами Jyn и Jy - ~ при m→0 (см. Jy II)
Вдействительности кривая в диапазоне 0…mотр (пунктир с двумя точками и сплошная) от 0 до Jy (mотр), а далее ассиметрично до Jyn – с
ограничением до m=mmax.
Замечание по mотр – При mотр скачок уплотнения, где ра= рн, войдет во внутрь сопла и часть сопла выключится из работы.
Зависимость при m=0… mотр вычислены теоретически.
Высотная характеристика ЖРД – зависимость тяги P и удельного импульса Jy от давления окружающей среды при постоянном давлении, соотношении компонентов в камере сгорания и геометрии камеры двигателя.
Однако чаще строят зависимость P и Jy от высоты полета H (что идентично). Согласно формуле m=const (Pк=const)
46
Pn=cons и Jyn=const
Р и Jy (см. II) при ↑ Н полета (Рн↓) будут возрастать, асимптотически
приближаться к Рn и Jyn.
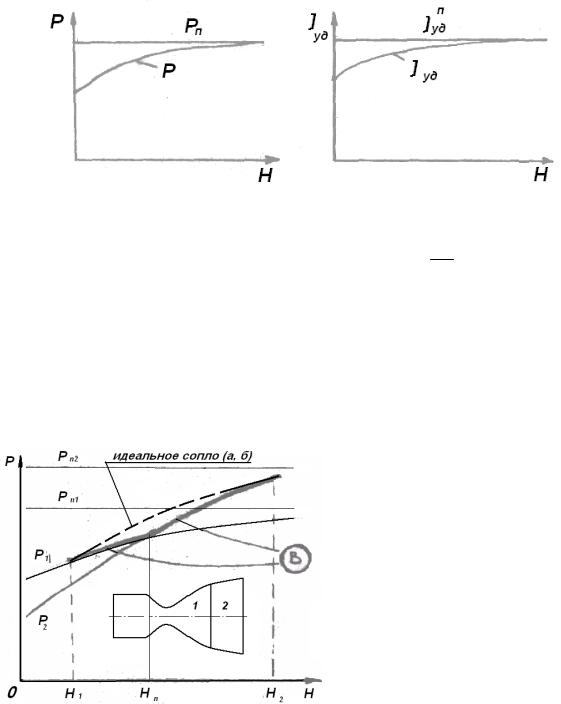
Рисунок 2.25. Высотная характеристика ЖРД
Р и Jy зависят от степени расширения сопла f = Fa
Fкр
Степень расширения сопла Чем ↑ f, тем ↓ Р у земли и ↑ Pn.
Поэтому из 2-х ЖРДУ I ступени РН выбирают сопло с малой f≈8…20, а для ДУ верхних ступеней с большим f=50…100.
Рисунок 2.26. Высотная характеристика ЖРД с изменяемым соплом
а – кольцевая камера сгорания с центральным телом; б – тарельчатая камера; в – соплом с выдвигаемым насадком
Степень расширения сопла геометрическая f (а степень расширения для газа рк/ра).
Для ДУ, работающих в большом диапазоне изменения высот, желательно иметь сопла с изменяемой f.
Это можно обеспечить применением:
а – кольцевых камер сгорания с центральным телом;
б – тарельчатой камерой. ЖРД;
в – соплом с выдвигаемым насадком.
47
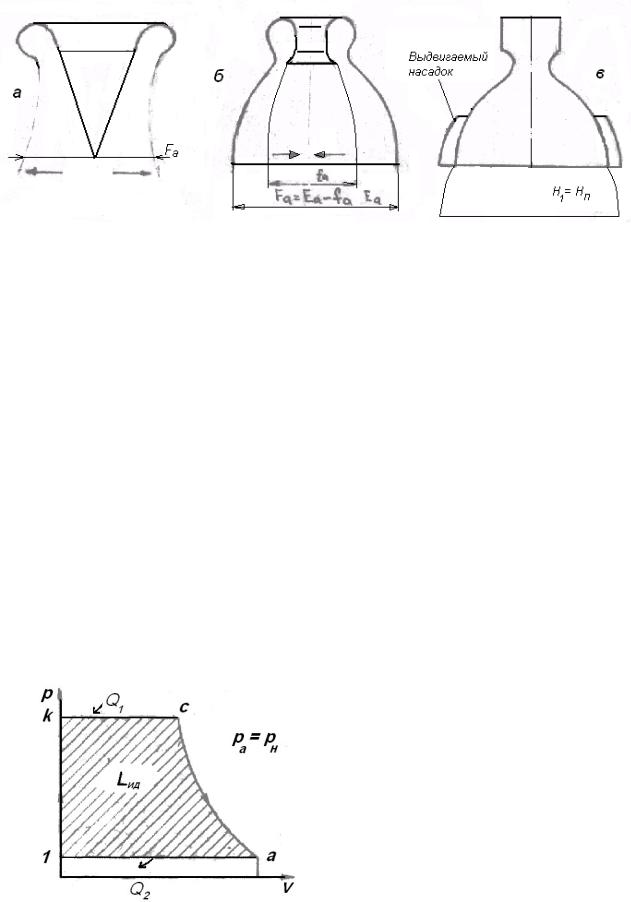
Рисунок 2.27. Камеры ЖРД а – кольцевая камера сгорания с центральным телом; б – тарельчатая камера; в –
соплом с выдвигаемым насадком
Идеально было бы сопло с плавным ↑ F при ↑ Н. Близко к ним а и б.
3. Газотермодинамические процессы в ЖРД
3.1. Термодинамический цикл ракетного двигателя
Термодинамический процесс в камере сгорания можно идеализировать для изучения его закономерностей протекания и представить в виде идеального процесса, изображенного в с/с координат, определяющих процесс параметров.
Представим процесс внутри камеры двигателя в pv координатах. Допущения:
1.Учитываются потери, обусловленные действием II закона термодинамики. Остальные потери отсутствуют.
2.Рабочее тело – идеальный газ.
3. Сгорание топлива при
p=const
|
4. |
Процесс расширения |
в |
|
сопле – изоэнтропный (адиабатный) |
|
|
|
Условия: |
|
|
|
Для 1кг рабочего тела Ра=Рн |
|
|
Рисунок 3.1. Идеальный цикл ЖРД |
Идеальный цикл состоит |
из |
|
|
|||
|
|
|
48 |
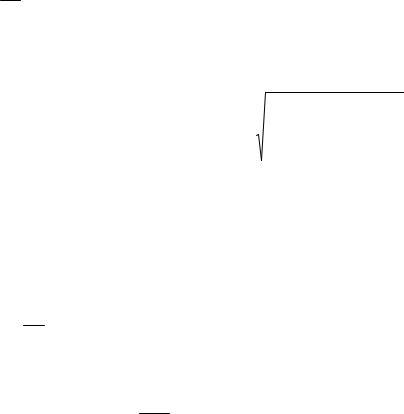
след. процессов: |
|
|
1. |
– (1 – к) V=cons, p=idem |
|
сжатие до рн - в насосах ТНА |
|
|
2. |
– (к – с) – подвод тепла к р. телу, p=const |
V=idem |
3.– (с – а) – расширение газа в сопле (теплообмен отсутствует), q=const
4.– (a – 1) – p=const – отвод тепла (идеальный процесс).
Замыкающая цикл – изобара.
Полезная работа идеального замкнутого цикла можно представить в виде
|
|
k |
|
|
|
1 |
|
|
|
||
L |
= |
R T |
|
− |
|
|
, |
||||
|
|
1 |
|
|
|
|
|||||
ид |
|
k −1 |
c c |
|
|
k −1 |
|
|
|||
|
|
|
|
|
|
|
|||||
|
|
|
ε k |
|
|||||||
|
|
|
|
|
|
|
|
|
|||
- степень расширения газа от рк до ра, k – показатель изоэнтропы (адиабаты).
Вся полезная работа цикла переходит в кинетическую энергию 1 кг газа.
|
|
2 |
|
|
|
k |
|
|
|
|
|
|
|
||
L |
|
= |
Ca |
→C |
|
= 2 |
R T 1− |
1 |
|
|
= J |
|
|||
|
|
|
|
|
|
|
|
|
|||||||
|
уд |
2 |
|
a |
|
k −1 |
с c |
|
k−1 |
|
|
у |
|||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
ε k |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Термодинамический КПД РД
Термодинамический КПД РД – показывает, какая часть располагаемой химической энергии топлива преобразуется в камере двигателя в кинетическую энергию газа в идеальном ракетном двигателе.
ηt = LQид , где
1
Q1 – идеальная теплотворная способность топлива
к
Q = Hи = СрТс → Ср = к −1Rc
|
|
|
|
η |
|
= 1− |
|
1 |
|
, |
||
|
|
|
|
t |
|
|
k −1 |
|||||
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
ε |
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|||
чем больше k = |
Cp |
= |
i + RT |
, тем |
больше работоспособность RT, но с |
|||||||
|
|
|||||||||||
Cv |
i |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|||
увеличением рк масса двигателя возрастает ещё больше;
49
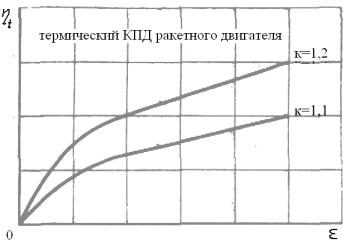
1) чем ↑ k, тем ↑ Ср и ↑ ηt ; поэтому увеличение количества многоатомных
газов нежелателен в продуктах сгорания;
2) ηt →1 при рн→0, цикл без потерь – полное расширение газа независимо
от давления рк в зависимости от Lс (длина сопла), которое влияет на ра.
Рисунок 3.2. Термический КПД ракетного двигателя
Реальный цикл в камере ЖРД протекает с потерями, которые уменьшают его эффективность по сравнению идеальными характеристиками цикла. К п д его составляет η = 0,84…0,90.
3.2. Неустойчивость процессов в ЖРД
Опыт создания ЖРД (РДТТ) показывает, что при определенных условиях, зависящих от режима работы двигателя, свойств топлив, геометрических размеров камеры и других факторов процесс сгорания в камере становится неустойчивым. Обычно Ар ≤ (0,005…0,1)Рк
Если Ар=(0,15…0,2)Рк, то работа камеры двигателя становится невозможной (двигатель разрушается).
Неустойчивость процесса заключается в том, что давление в произвольной точке камеры ркi не постоянно, а колеблется с большей или меньшей амплитудой Ар. Они влияют на работу двигателя (экономичность, надежность)
имогут приводить к разрушению двигателя и ЛА.
ВЖРД наблюдается 2-а типа неустойчивости: Низкочастотные колебания (f=1…100 Гц).
50