

Основа КА Лекции Пузин
.pdfКОСМИЧЕСКИЕ АППАРАТЫ НАБЛЮДЕНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ
Панели СБ перед стартом РН на борт КА устанавливаются в сложенном состоянии и раскрываются после выведения КА на орбиту, поэтому для раскрытия СБ должен быть предусмотрен и установлен механизм раскрытия.
|
КА Бион-М №1 |
СБ раскрыты |
СБ сложены |
Другой важной особенностью панелей СБ является наличие поворотных механизмов (по каналам крен и тангаж) для обеспечения максимальных условий их освещенности прямым солнечным светом, которые управляются средствами БКУ.
30
КОСМИЧЕСКИЕ АППАРАТЫ НАБЛЮДЕНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ
Важной характеристикой панелей СБ, связанной с конструкцией КА и его функционированием на орбите, является средний косинус Cos(ᾶ) угла между нормалью к рабочей поверхности панели солнечной батареи и направлением на Солнце в процессе целевой работы (или за определенный период функционирования космического аппарата). Эта характеристика используется
при оценке баланса электрической энергии на борту КА в процессе его функционирования.
Данная величина имеет функциональную связь со следующими параметрами:
-орбитального движения центра масс КА с точки зрения условий освещенности ПСБ в период всего времени эксплуатации на орбите;
-организации углового движения вокруг центра масс КА в процессе орбитального полета и решения целевых задач;
Бортовой комплекс управления (БКУ) КА ДЗЗ предназначен для управления космическим аппаратом в процессе целевого и нештатного функционирования. В состав БКУ входят: бортовая вычислительная система (БВС), бортовое синхронизирующее координатно-временное устройство (БСКВУ), система трансляции команд и распределения питания (СТКРП),
бортовая аппаратура командно-измерительной системы (КИС), бортовая аппаратура системы телеметрических измерений, система управлением движения (СУД). Краткое их назначение было приведено выше.
31
КОСМИЧЕСКИЕ АППАРАТЫ НАБЛЮДЕНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ
Система управления движением КА ДЗЗ
Система управления движением (СУД) предназначена для управления угловым движением КА относительно центра масс. Приборный состав СУД, так исполнительных органов на различных типах КА ДЗЗ может быть разным.
Номинальный состав СУД КА ДЗЗ:
-блок определения координат звезд (БОК3, 4шт);
-силовой гироскопический комплекс ( СГК, 6 шт);
-инфракрасный построитель местной вертикали (ИПМВ, 3 шт);
-измеритель угловой скорости волоконно-оптический с акселеро- метрами (ИУС ВОА);
-блок измерителей угловой скорости волоконно-оптический с акселеро- метрами (БИУС ВОА);
-система сброса кинетического момента (ССКМ, 1 шт.) с тремя ортогонально установленными на корпусе КА электромагнитами;
-многофункциональный программируемый контроллер (МПК);
-бортовое программное обеспечение (БПО) СУД.
Функционально в состав СУД входят бортовая вычислительная система (БВС), приводы камеры сгорания корректирующе-тормозного двигателя (КТД) и жидкостные ракетные двигатели малой тяги (ЖРДМТ1, ЖРДМТ2).
В качестве основных исполнительных органов при управлении угловым
движением КА используются силовые гироскопические комплексы.
32
КОСМИЧЕСКИЕ АППАРАТЫ НАБЛЮДЕНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ
Управляющие ракетные двигатели КДУ или ОДУ используются для создания управляющих моментов до окончания раскрутки гиромоторов СГК при начальной ориентации изделия, при стабилизации по каналу рыскания во время работы КТД, для переориентации КА до и после участка выдачи на орбите выведения импульса тяги КТД, в нештатных ситуациях при невозможности использования СГК.
Сброс кинетического момента, накапливаемого системой СГК в процессе управления изделием, производится с помощью электромагнитов средств ССКМ, взаимодействующих с магнитным полем Земли. В процессе такого взаимодействия создается управляющий разгрузочный магнитный момент.
Приведение КА в ориентированное в ОСК положение производится с использованием приборов СУД: ИПМВ, ИУС ВОА (БИУС ВОА) и МПК, – за время не более 40 минут с погрешностью по углу (при Р=0,96) не хуже ±90′ по всем каналам и по угловой скорости не более ± 0,02 °/с по каждому каналу.
СУД обеспечивает построение приборной инерциальной системы координат текущей эпохи (ПИСК), оси которой параллельны одноименным осям ИСК эпохи t. На интервале построения ПИСК осуществляется разгон СГК.
После построения ПИСК СУД обеспечивает отработку программной траектории – наведение осей ССК в соответствии с программой управления угловым движением в зависимости от решаемой КА целевой задачи.
33

ОСНОВЫ УСТРОЙСТВА КОСМИЧЕСКИХ АППАРАТОВ
Кафедра космического машиностроения.
Лекция 3
.
Самара 2017
БЛОК ВЫВЕДЕНИЯ ПОЛЕЗНОЙ НАГРУЗКИ «ВОЛГА»
Назначение и состав блока выведения «Волга»
Блок выведения (БВ) «Волга» совместно с ракетой-носителем «Союз-2» этапов 1а, 1б и 1в обеспечивает выведение полезного груза (ПГ) с космодромов Плесецк и Байконур:
-на круговые орбиты высотой до 1500 км;
-на солнечно-синхронные орбиты высотой до 850 км.
Так при запуске РН «Союз-2» этапа 1б с космодрома Байконур энергетические возможности БВ обеспечивают выведение ПГ на круговые орбиты высотой 800 км следующей массы:
-6280 кг на орбиту с наклонением 51,8º;
-4900 кг на орбиту с наклонением 91,6º.
При запуске с космодрома Плесецк энергетические возможности БВ обеспечивают выведение ПГ на круговые орбиты высотой 800 км следующей массы:
-5700 кг на орбиту с наклонением 62,8º;
-4590 кг на солнечно-синхронную орбиту наклонением 91,6º.
БВ обеспечивает решение следующих задач:
−перевод одного или нескольких КА с опорной орбиты на рабочую;
−стабилизацию БВ+ПГ на пассивных и активных участках полета;
−контроль состояния БВ и полезного груза в процессе выведения;
−ориентацию БВ+ПГ на пассивных участках полета и перед отделением КА, а также, в случае необходимости, обеспечение закрутки БВ+ПГ;
−затопление (или увод) блока выведения с рабочей орбиты.
2
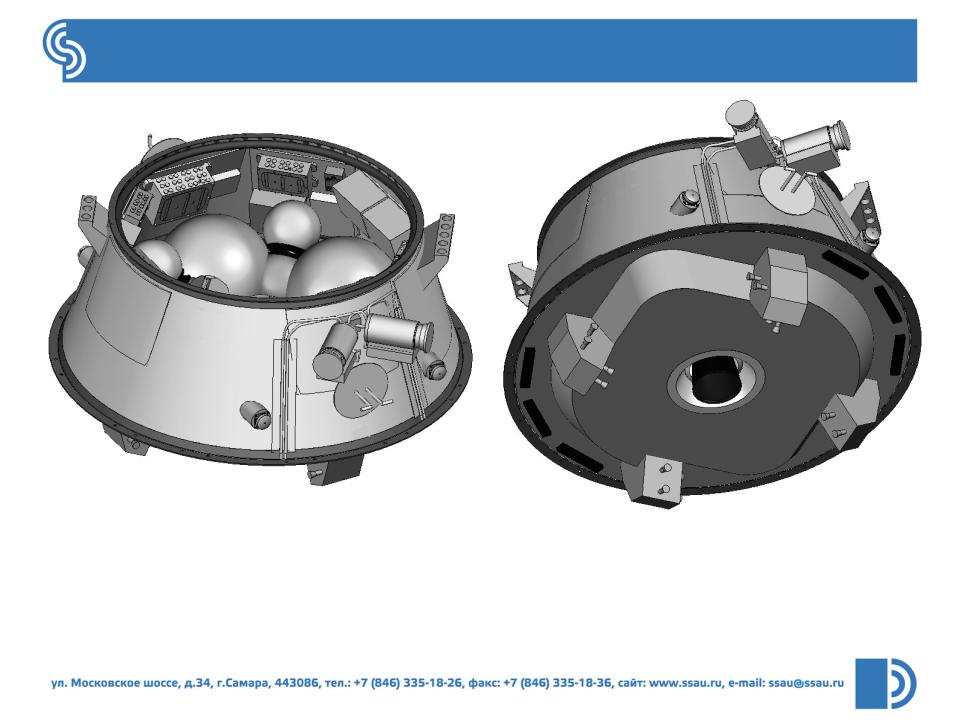
БЛОК ВЫВЕДЕНИЯ ПОЛЕЗНОЙ НАГРУЗКИ «ВОЛГА»
Внешний вид БВ «Волга»
Основные технические характеристики БВ:
-масса конструкции без заправки – 840 кг,
-масса БВ с учетом заправки – 1740 кг,
-масса компонентов топлива ОДУ: АТИН (окислитель) - от 194 до 584 кг,
НДМГ (горючее) от 106 до 316 кг;
-габариты блока выведения: поперечный размер - 3100 мм, высота БВ - 1025 мм;
-тяга маршевого двигателя – 2943 Н.
3
БЛОК ВЫВЕДЕНИЯ ПОЛЕЗНОЙ НАГРУЗКИ «ВОЛГА»
Особенности функционирования БВ
Блок выведения используется:
-с головным обтекателем ø3000 мм на РН «Союз-2» этапа 1в;
-с головным обтекателем ø4110 мм на РН «Союз-2» этапов 1а и 1б. Бортовая аппаратура БВ функционирует:
-на высотах от 0 до 1500 км;
-в негерметичном отсеке;
-при напряжении от 23 до 32 В при снижении напряжения до 22 В длительностью до 200 мс.
Общее время существования БВ от момента отделения от ракеты-носителя до окончания маневра увода не превышает 24 часа.
Команда на отделение БВ от РН выдается системой управления РН.
В БВ входят следующие бортовые системы.
Система управления БВ (СУ) представляет собой совокупность бортовых систем, которая совместно с соответствующим программным и информационным обеспечением предназначена для управления движением центра масс БВ, управления движением БВ относительно его центра масс, реализации задачи по подаче напряжения питания на выходные разъемы БВ в целях отделения полезной нагрузки, а также управления режимами работы бортовой системы телеметрических измерений (БСТИ) в целях сбора, накопления и выдачи на наземные измерительные пункты контрольной информации о функционировании бортовой аппаратуры БВ и ходе реализации миссии выведения ПГ.
СУ начинает свое функционирование, как единый логически, электрически и
информационно связанный комплекс, начиная с момента включения на СК бортовой
4
БЛОК ВЫВЕДЕНИЯ ПОЛЕЗНОЙ НАГРУЗКИ «ВОЛГА»
цифровой вычислительной машины (БЦВМ «С5В»).
Функционирование СУ осуществляется вплоть до момента выдачи команды на выключение корректирующе-тормозного двигателя (КТД) ОДУ при выдаче импульса тяги в целях решения задачи увода БВ с орбиты или затопления БВ в заданном районе акватории мирового океана.
Система управления БВ решает следующие задачи:
-обеспечивает подготовку к запуску с использованием наземных средств ТК, а также подготовку приборов, систем и агрегатов к расчетному моменту отделения блока выведения с полезной нагрузкой от РН;
-принимает команды из СУ РН в целях организации привязки отдельных задач, выполняемых СУ БВ, к фактически реализуемой программой функционирования СУ РН;
-определяет ориентацию БВ в ОСК на момент отделения его от РН и управление угловым движением и движением центра масс БВ при выведении ПН на заданную орбиту;
-компенсирует ошибоки выведения РН путем уточнения величины и направления импульса тяги с учетом измеренных параметров движения центра масс;
-отделяет полезную нагрузку;
-отрабатывает маневр увода БВ с рабочей орбиты или затопления БВ в заданном районе акватории мирового океана;
-обеспечивает возможность реализации миссии по ранее заложенному на ТК полётному заданию в случае задержки пуска ракеты-носителя до 72 часов;
-решает баллистико-навигационные задачи в ходе полета;
-рассчитывает программы углового движения БВ "Волга" в течение всего интервала времени орбитального функционирования БВ (в том числе и для участков выполнения
5
БЛОК ВЫВЕДЕНИЯ ПОЛЕЗНОЙ НАГРУЗКИ «ВОЛГА»
маневров);
-определение на орбитальном участке полёта параметров движения центра масс (ПДЦМ;
-размножение, логическую обработку и трансляцию на бортовые системы БВ команд управления;
-управление работой бортовой аппаратуры в соответствии с заданной логикой;
-восстановление работоспособности СУ при возникновении неисправностей основных комплектов бортовой аппаратуры СУ, автоматическое переключение на резервные комплекты бортовой аппаратуры СУ;
-выдачу команды на включение КТД ОДУ в заданные в ПЗ или уточненные моменты;
-измерение приращения кажущейся скорости в ОСК при отработке импульсов скорости;
-выдачу команды на выключения МД при наборе требуемой величины приращения кажущейся скорости;
-организацию (при необходимости) вращения "связки" БВ и ПГ на пассивных участках полёта для обеспечения теплового режима ПГ в соответствии с вариантами выполнения данной задачи, определенными полетным заданием;
-расчет времен начала и конца зон радиовидимости ИПов, координаты которых заданы в ПЗ, и организация включения БСТИ в соответствии с данными временами;
-проведение испытаний СУ БВ с использованием наземных средств на ТК.
Всостав СУ БВ входят следующие системы:
а) Бортовая цифровая вычислительная машина (БЦВМ «С5В») с программно-
математическим обеспечением используется в качестве центрального управляющего звена СУ БВ. БЦВМ «С5В» осуществляет информационный обмен с бортовой аппаратурой по МКО и выдает команды управления на БА через СТКРП.
6