

Министерство образования и науки Российской Федерации
Федеральное агентство по образованию
Федеральное государственное бюджетное образовательное учреждение
высшего профессионального образования
«Комсомольский-на-Амуре государственный
технический университет»
Факультет электротехнический
Кафедра ЭПАПУ
Курсовая работа
по дисциплине «Теория автоматического управления»
Анализ и синтез систем автоматического управления
(линейной и нелинейной системы).
Вариант – 2
Студент группы 9ЭП-1 А. А. Калинин
Преподаватель Г.М. Гринфельд
201 2
2
С одержание
одержание
1 Расчёт линейной системы автоматического управления …………….……..3
2 Расчёт нелинейной системы автоматического управления.………….……17
3 Литература ………….……………….……………….……………….………21
Р асчет линейной системы автоматического управления
Рисунок 1 – Исходная структурная схема линейной САУ
-
Проанализировать устойчивость замкнутой системы, используя прямой метод оценки устойчивости и произвольно выбранный критерий устойчивости.
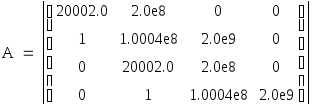
Исходные данные:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Передаточная функция разомкнутой САУ по входному сигналу:
![]()
![]()
Передаточная функция замкнутой САУ по входному сигналу:
![]()
Оценка устойчивости САУ прямым методом
Определим полюса передаточной функции замкнутой САУ:
Характеристическое уравнение:
![]()
![]()
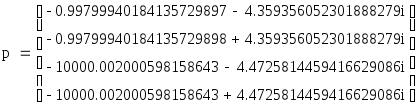
Вещественные части всех корней характеристического уравнения отрицательные, следовательно, замкнутая САУ устойчивая.
Оценка устойчивости САУ с помощью определителя Гурвица:
Все
коэффициенты характеристического
уравнения
![]() - положительны, то есть необходимое
условие выполняется.
- положительны, то есть необходимое
условие выполняется.
Заполняем определитель:
Находим диагональные миноры:
![]()
![]()
![]()
![]()
![]()
Диагональные миноры положительны – система устойчива.
-
 Провести
синтез последовательного и параллельного
корректирующих звеньев, обеспечивающих
следующие показатели качества
процесса регулирования в скорректированной
системе:
Провести
синтез последовательного и параллельного
корректирующих звеньев, обеспечивающих
следующие показатели качества
процесса регулирования в скорректированной
системе:
a) перерегулирование σ ≤ 25 %;
б) длительность переходного процесса, не превышающую значения
tрег=0.4с
в) установившаяся ошибка по скорости скорректированной системы не превышает в 0,5 раза ошибки по скорости нескорректированной системы.
Последовательная коррекция
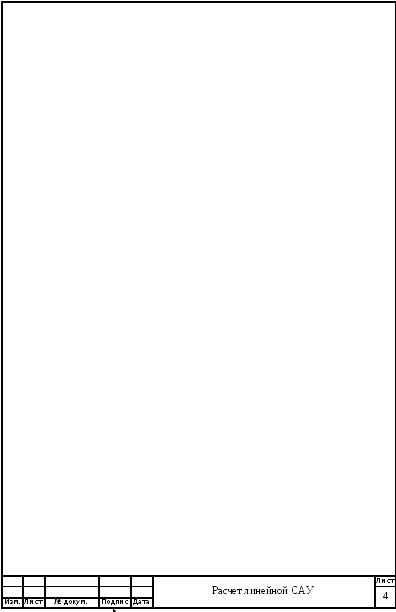
Определим по номограмме (рисунок 3) частоту среза для данных показателей качества:
![]() ;
;
Рисунок 2 – Номограмма для определения частоты среза желаемой ЛАХ.
Т. к. длительность переходного процесса не должна превышать значения
tрег=0.4с, пусть tр=0.4с. Тогда:
![]()

Коэффициент усиления нескорректированной системы:
![]()
![]()
Установившаяся ошибка по скорости нескорректированной системы:
![]()
Установившаяся ошибка по скорости скорректированной системы:
![]()
Коэффициент усиления скорректированной системы:
![]() ;
;
Передаточная функция разомкнутой нескорректированной системы:
![]()
 ЛАХ
нескорректированной САУ:
ЛАХ
нескорректированной САУ:
![]()
+
![]() +
+
![]()
=>
T5=0.2
Передаточная функция желаемой САУ:
![]()
ЛАХ корректирующего звена:
![]()
Передаточная функция корректирующего звена:
![]()
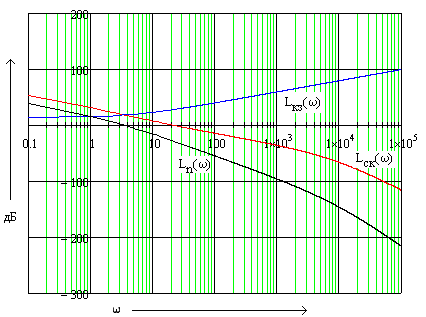
Рисунок 3 – ЛАХ нескорректированной и скорректированной систем и корректирующего звена.
Смоделируем коррекцию САУ в MATLAB

Рисунок 4 – Последовательная коррекция САУ смоделированная в MATLAB
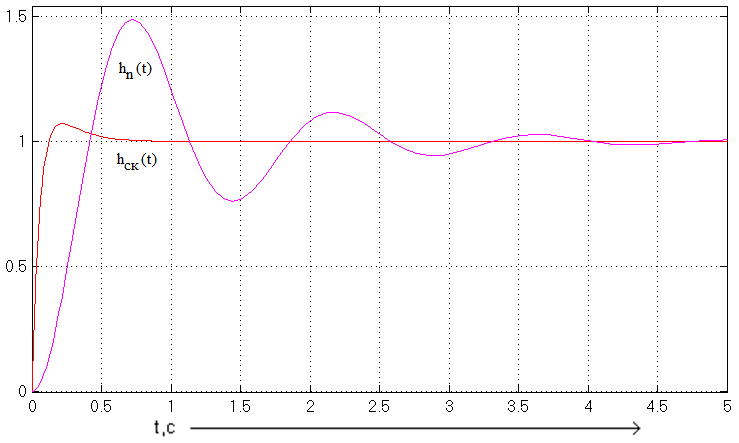
Рисунок 5 – Переходные функции нескорректированной и скорректированной системы.
По рисунку 5 определим:
Перерегулирование в скорректированной системе:
![]()
Длительность переходного процесса (время регулирования) в скорректированной системе:
![]()
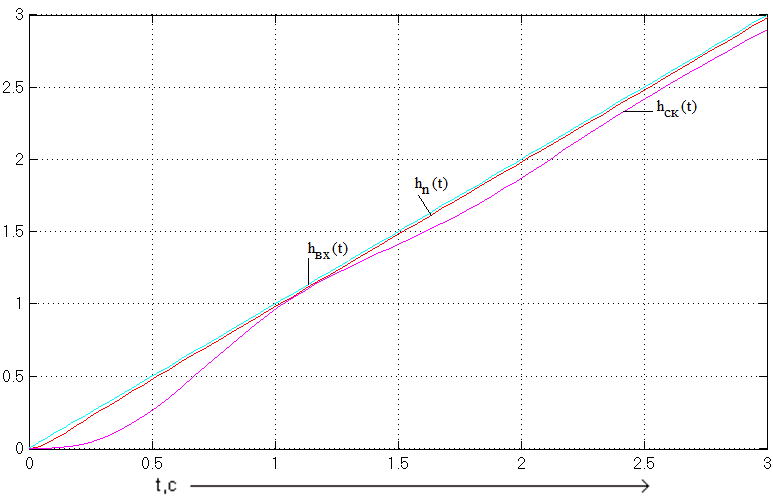
Рисунок 6 – Реакции скорректированной и нескорректированной систем на равномерно нарастающий сигнал.
По рисунку 6 определим установившуюся ошибку по скорости в скорректированной системе:
![]()
Параллельная коррекция
Передаточная функция разомкнутой нескорректированной системы:
![]()
ЛАХ нескорректированной САУ:
+
![]() +
+
![]()
![]()
ЛАХ желаемой САУ:
![]()
 Передаточная
функция охватываемого звена САУ:
Передаточная
функция охватываемого звена САУ:
![]()
ЛАХ охватываемого звена САУ:
![]()
Передаточная функция корректирующего звена:
![]()
ЛАХ корректирующего звена:
![]()
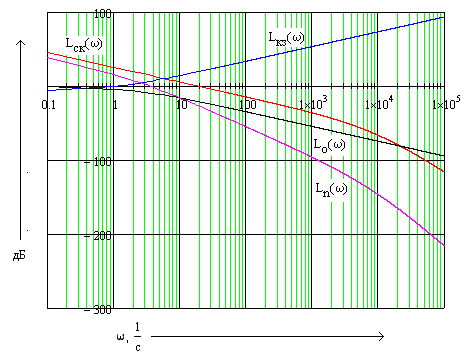
Рисунок 7 – ЛАХ нескорректированной и скорректированной систем, и ЛАХ корректирующего и охватываемого звеньев
 Смоделируем
коррекцию САУ в MATLAB,
добавив дополнительное последовательное
корректирующее звено.
Смоделируем
коррекцию САУ в MATLAB,
добавив дополнительное последовательное
корректирующее звено.
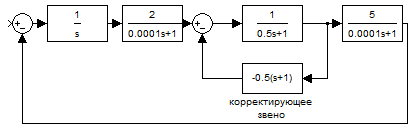
Рисунок 8 – Параллельная коррекция САУ смоделированная в MATLAB

Рисунок 9 – Переходные функции нескорректированной и скорректированной системы.
По рисунку 9 определим:
Перерегулирование в скорректированной системе:
![]()
Длительность переходного процесса (время регулирования) в скорректированной системе:
![]()
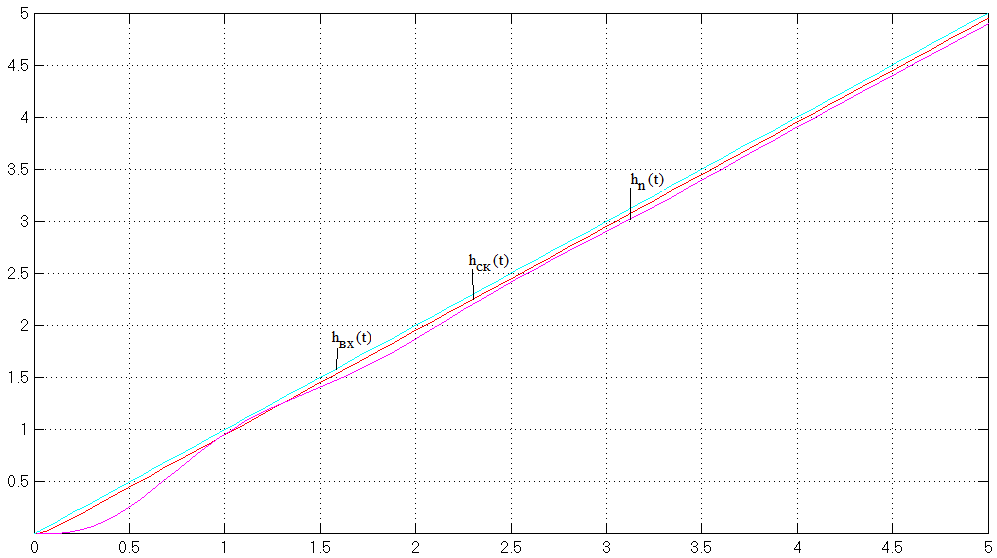
Рисунок 10 – Реакция системы на равномерно нарастающий сигнал
нескорректированной и скорректированной систем.
По рисунку 10 определим установившуюся ошибку по скорости в скорректированной системе:
![]()
 3.
Описать систему в пространстве состояния.
3.
Описать систему в пространстве состояния.
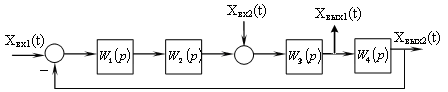
Рисунок 11 – Структурная схема нескорректированной САУ.
Метод прямого программирования:
Составим детализованную структурную схему:
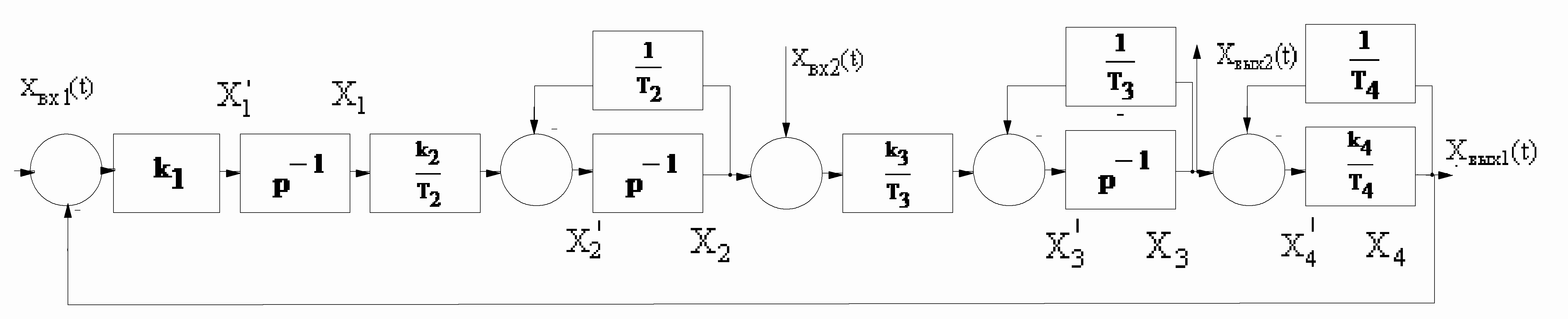
Рисунок 12 – Детализованная структурная схема.
Система дифференциальных уравнений, описывающих динамику линейной САУ:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
Уравнения связи выходных сигналов с переменными состояния:
![]() ;
;
![]() ;
;
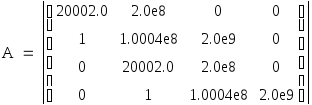
 Введем
в рассмотрение матрицу системы
(коэффициентов системы) – А, матрицу
входов (управления) – В и матрицу выхода
(наблюдения) – С:
Введем
в рассмотрение матрицу системы
(коэффициентов системы) – А, матрицу
входов (управления) – В и матрицу выхода
(наблюдения) – С:

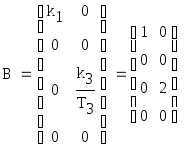
![]()
Запишем матричную передаточную функцию замкнутой системы при нулевых начальных условиях:
![]() ,
где
,
где
 - единичная матрица
- единичная матрица
,где
![]()
Матрица
переходов описывается выражением:
![]()
Выполнив
обратное преобразование Лапласа от
матрицы
![]() ,
получим фундаментальную матрицу системы.
,
получим фундаментальную матрицу системы.
Переменные состояния определяются выражением:
![]() ,
где
,
где
 – вектор начальных
условий
– вектор начальных
условий
Найдем
аналитическое выражение для
![]() ,
используя
теорему Сильвестра
,
используя
теорему Сильвестра
Характеристическое уравнение:
![]()
Корни этого уравнения:
![]()
![]()
![]()
![]()
По
теореме Сильвестра, матрица перехода
представима в виде:
 де
де
![]() Запишем
формулы всех
Запишем
формулы всех
![]()
Таким образом матрица перехода представлена в виде:
![]()
 Переменные
состояния:
Переменные
состояния:
![]() ,
где
,
где
 – вектор начальных
условий
– вектор начальных
условий
![]()
![]()
![]()
![]()
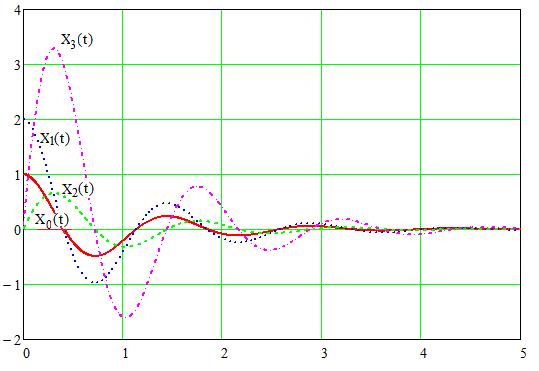
Рисунок 13 – Графики переменных состояния.
Смоделируем детализованную систему в MATLAB:
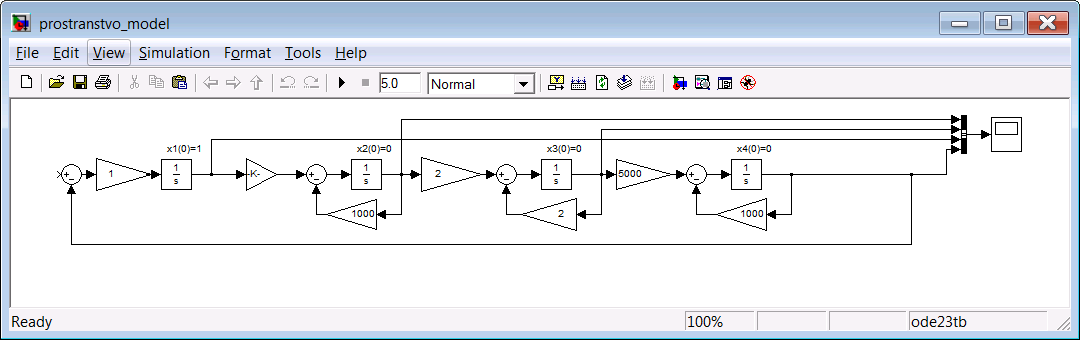
Рисунок 14 – Нескорректированная САУ, смоделированная в MATLAB
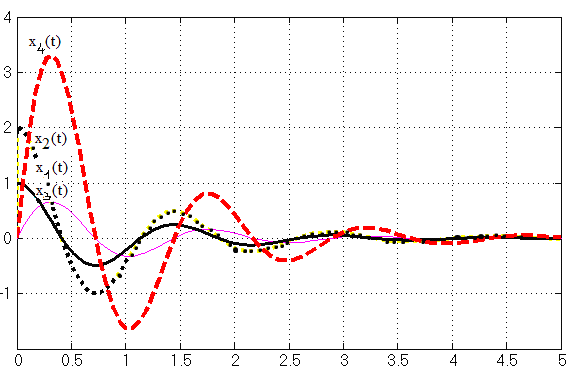
 Рисунок
15 – Графики переменных состояния
Рисунок
15 – Графики переменных состояния
системы смоделированной в MATLAB
 4.
Рассчитать точность скорректированной
системы по управляющему и возмущающему
воздействиям в установившемся режиме.
4.
Рассчитать точность скорректированной
системы по управляющему и возмущающему
воздействиям в установившемся режиме.
Запишем передаточные функции скорректированной разомкнутой и замкнутой систем, а также функции по ошибке и возмущающему воздействию. Рассчитаем точность системы по управляющему и возмущающему воздействию.
Передаточная функция разомкнутой скорректированной САУ по входному сигналу:
![]()
Передаточная функция замкнутой скорректированной САУ по входному сигналу:
![]()
Передаточная функция замкнутой скорректированной САУ по ошибке:
![]()
Так
как передаточная функция
![]() имеет нулевой полюс, то система –
астатическая с астатизмом первого
порядка.
имеет нулевой полюс, то система –
астатическая с астатизмом первого
порядка.
Коэффициенты ошибки системы:
![]() ;
(т.к. порядок астатизма = 1) – ошибка по
положению.
;
(т.к. порядок астатизма = 1) – ошибка по
положению.
![]() -
ошибка по скорости.
-
ошибка по скорости.
Передаточная функция разомкнутой скорректированной системы по возмущающему сигналу:
![]()
Передаточная функция замкнутой скорректированной системы по возмущающему сигналу:
![]()
5. Определить критическое время запаздывания, при котором скорректированная система будет находиться на границе устойчивости.
Для САУ после последовательной коррекции:
Значение
фазочастотной характеристики на частоте
среза
![]() (рисунок 16), тогда запас по фазе:
(рисунок 16), тогда запас по фазе:
![]()
Критическое
время запаздывания:
![]()
Критическая
частота:
![]() ;
тогда запас по амплитуде:
;
тогда запас по амплитуде:
![]()
![]()
![]()
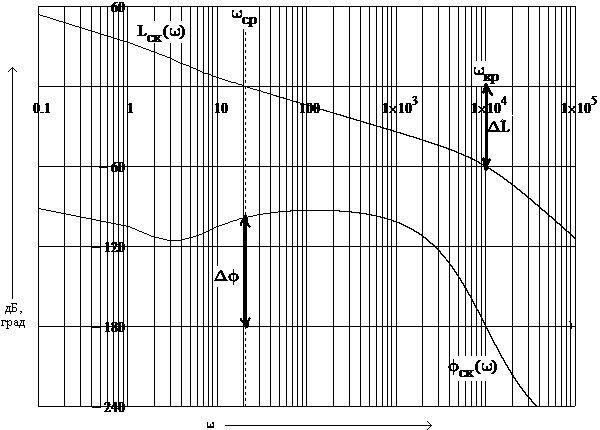
Рисунок 16 – ЛАХ и ФЧХ разомкнутой
системы последовательной коррекции
Вывод:
Оценки устойчивости замкнутой системы прямым методом и косвенным по критерию Найквиста показали, что система устойчивая. Выполнены коррекции звеньев для улучшения показателей качеств процесса регулирования замкнутой системы. В описании системы в пространстве различными способами, графики переходных процессов (рис. 13, рис 15) абсолютно одинаковые. Рассчитаны точность и критическое время запаздывания скорректированной системы.