

Схемы замещения асинхронного двигателя при питании
от источников напряжения и тока
При питании от ПЧ, как идеализированного источника трехфазного симметричного напряжения, схема замещения фазы АД в установившемся режиме будет соответствовать рис.
|
|
R1 |
- |
|
|
|
|
|
|
|
а |
U |
б |
x |
в |
x'2 |
|
г |
|
|
|
1 |
1 |
|
|||||
|
|
|
|
|
|
x |
- |
|
|
|
|
- |
|
|
|
|
I 2 |
|
|
- |
|
I1 |
- |
|
- |
- |
|
- |
R2 |
U1 |
|
|
U 1 |
|
E1 |
E 2 |
|
U 2 |
|
|
|
|
|
s |
|||||
|
|
|
|
|
|
- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I |
|
|
|
|
0 |
|
0 |
|
0 |
|
|
0 |
|
U1 вектор напряжения на обмотке фазы статора АД, вращающийся с частотой 1 = 0н
0н = 2 f1н /р
U1 j 1 0н U1 I1 R1 1 Lσ1I1

L12 Iμ
E1 E2 μ 0н U jI1 x1 jIμ xμ
х1 = 0н L1 х = 0н L12
|
|
|
|
|
|
|
|
|
|
|
|
j |
|
|
|
|
|
|
|
|||||||||||||||||||
U jI x j |
|
0н |
|
0н |
I R / s |
|
||||||||||||||||||||||||||||||||
2 |
|
2 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
2 2 |
|
||||||||||
|
x L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
2σ |
0н |
|
|
|
|
|
|
|
|
|
2 |
I |
|
|
|
s = ( 0н - )/ 0н |
|||||||||||||||||||||
2 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
2 |
|
|
|
||||||||||||||||
|
|
|
|
jy |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
jy |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
- |
|
|
|
|
|
- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
jI1х1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- |
|
|
|
|
|
|
|||||
|
|
I1R1 |
- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
U1 |
|
|
- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- |
|
|
|
|
|
|
jI1х1 |
- |
|
|
|
||||||
- |
|
|
|
|
|
jI′2х2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
jI′2х2 |
|
|
|
|
|
|
|
I1R1 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
U′1 |
|
|
|
- |
- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- |
|
|
- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U'1 |
|
|
|
||
|
|
|
|
|
|
|
-E1 U′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- |
|
|
|
|
-E1 |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
-2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
U'2 |
|
|
|
|
|
|
- |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
I1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
1 |
- |
|
|
- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U |
- |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
I′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- 1 |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 I |
|
2 |
- |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
- |
|
|
|
- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- |
|
I′2L2 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I1L1 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
- |
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
- |
x |
|||||||||||
|
|
|
|
|
|
|
|
|
|
- |
|
|
|
- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I1L1 |
|||||
|
|
|
|
|
|
|
|
I |
|
|
|
|
|
I′2L2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- |
- |
|
||||||||||
- |
2 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I′2 |
1 |
|
|||||||
- |
|
- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- |
|
||||||||||
|
|
I′2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I |
|
|
|
|
|||||
|
|
|
E = E′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- |
|
-1 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
E1= E′2 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
а) |
б) |
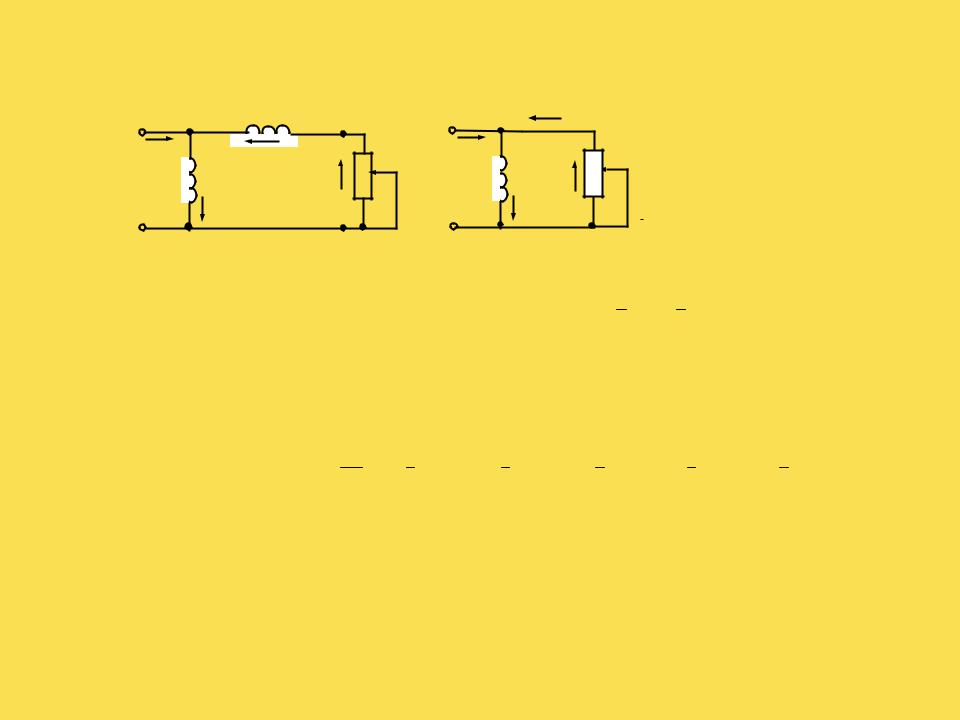
При питании от управляемого ПЧ, как источника трехфазного симметричного тока, схема замещения фазы АД в установившемся режиме при частотном регулировании
|
в |
х′2 |
г |
|
|
в,г |
- |
|
|
|
|
|
|
|
х |
|
|
|
- |
х2 |
I 2 |
|
|
|
|
|
|
- |
- |
|
|
* |
|
|
|
|
|
|
|
||
I1 |
|
I 2 |
|
R |
I |
1 |
|
|
|
|
|
|
|
|
- |
|
|
- |
R |
|
|
|
|
||||
|
|
|
U 2 |
|
|
|
|
|
|
|
|||
|
- |
|
2 |
|
- |
U′2 |
|
|
|
|
|
|
|
|
|
|
s |
|
I* 0 |
|
2 |
s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
0 I |
|
0 |
|
|
|
|
|
|
|
|
||
|
|
а) |
|
|
|
|
|
|
б) |
|
|
|
|
Если ввести в рассмотрение фиктивный ток статора |
I |
I |
1 |
x |
μ |
/ x |
|||||||
|
|
|
|
|
|
|
|
1 |
|
|
2 |
||
, отличающийся от реального только значением его модуля, то схема замещени фазы АД может быть преобразована к виду
При этом вектор полного потокосцепления ротора
2 I x2 a I1 x2 a I 2 x2 a I1 x a I 2 x2 a
вектор напряжения между точками г и 0 схемы замещения на рис.а
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U |
jI x a j |
0н |
a j |
0н |
a I R / s |
||||||||||
2 2 2 |
|
|
2 |
2 2 |
|||||||||||
совпадают с их определениями в схеме замещения АИН

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Схемы замещения и векторные диаграммы отражают все |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
основные процессы, происходящие в АД, и представляют собой |
||||||||
|
|
|
|
|
|
|
- |
|
- |
|
основу для изучения режимов его работы при питании от |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I* |
|
|
|
|
|
I |
|
преобразователей частоты. Они позволяют выявить основные |
|||||||||||
- |
1 |
1 |
х |
соотношения параметров и переменных, определяющие статические |
||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- |
|
|
|
|
|||||||||||||||||
I2 |
- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I |
|
характеристики АД и обеспечивающие рациональные способы его |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
I |
* |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
частотного управления. Такими соотношениями являются зависимости |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
основного потокосцепления |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
х* |
|
|
|
|
|
потокосцеплений |
статора |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ротора |
|
2 |
, токов намагничивания I , статора I1,, ротора I2 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
соответствующих им магнитных потоков Ф , Ф1, Ф2, электромагнитного |
момента М |
|||||||||||||||||||||||||||||||||||||||
АД от параметров его схемы замещения при различных соотношениях питающих обмотки статора напряжения или тока и их частот f1.
,

.Статические характеристики асинхронного двигателя
вразомкнутой системе ПЧ-АД
Статические характеристики АД при U1 = const и f1 = const.
При питании АД от идеализированного ПЧ, как источника напряжения, его статическая механическая характеристика при U1 = const и f1 = const
, определяется в соответствии со схемой замещения
|
2 |
|
|
|
|
2 |
|
|
||
M |
3I 2 |
R2 |
|
|
|
|
|
3U1 |
R2 |
|
0н sа |
|
|
s |
|
[(R c R / s)2 ( x c x' |
)] |
||||
|
|
0н |
а |
|||||||
|
|
|
|
|
|
1 1 2 |
1 1 2 |
|
||
с1 1+ х1/х = U1/Е10 – модуль коэффициента, характеризующего
рассеяние статора АД и учитывающего падение напряжения на сопротивлениях обмотки статора от намагничивающего тока I при переходе от исходной Т-образной схемы замещения к расчетной Г- образной схеме замещения АД

для общепромышленных АД с1 = 1,02 1,08
sа ( 0 ) / 0н s
Качественный вид механических характеристик АД при U1 = U1н , f1 = f1н и f1 =1,5 f1н ( =1,5) показан на рисунке
|
s |
|
|
Ф ( >1) |
|
M ( <1) |
Ф ( =1) |
|
M |
Ф max |
|
cos 2 |
||
0н |
||
cos 2 0н |
M( =1) |
|
|
|
|
|
|
|
M, Ф |
|
|
|
|
|
|
|
|
|
|
0 1 |
|
|
|
|
|
|
|
|
|
|
|
||
- Mкг -1 |
Ф 0 |
|
1 Mкд cos 2 |
||||
а)
s |
|
|
E 2 |
|
I 2a |
|
I 2 |
0н |
I 2 |
|
E 2
0 1 |
I 2а |
E 2 |
I 2max I 2
б)

M кФ |
|
|
|
I |
|
возникает в результате взаимодействия |
|
|
|||||||||||||||||||||||||
|
|
|
|
μ |
|
|
2а |
|
результирующего магнитного потока |
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U1 |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Ф |
|
|
|
|
|
|
|
|
|
|
|
|
|
R2 |
|
|
x2 sа |
|
|
|
|
|
|
|
|
|
|||||||
к 0н |
|
|
R s c R |
2 |
|
x c x 2 2 s |
а |
2 |
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
1 |
2 |
|
|
|
|
1 |
1 |
2 |
|
|
|
|
|
|
|||||||
и активной составляющей |
|
|
|
|
|
|
|
|
I |
|
I cos |
2 |
|
|
|
||||||||||||||||||
тока ротора |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2а |
|
|
2 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
кФ |
|
|
0н |
s |
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
E2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
I 2 |
|
|
|
|
|
|
2 |
|
, |
x s |
|
|
2 |
|
|
|
|
cos |
2 |
R / |
R 2 |
x 2 s |
2 |
||||||||||
|
|
|
z2 |
|
|
|
|
|
|
|
|
R |
|
а |
|
|
|
|
|
|
|
2 |
2 |
2 |
а |
||||||||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
к 3рw1k1 / 
 2
2
При s минимальное значение потока намагничивания стремиться к
|
|
|
U1 x2 |
|
|
|
Ф min |
|
|
|
|
|
0,5Ф 0 |
к |
0н |
x |
c x |
|
||
|
|
1 |
1 2 |
|
||

Ф 0 U1 / к 0н с1
Нелинейность кривой |
I s |
вызвана как нелинейностью Ф (s), |
2 |
так и изменением индуктивного сопротивления рассеяния ротора х'2 (s).
При больших скольжениях х'2 R'2 и, в итоге, ток ротора асимптотически |
||||||
стремиться к своему предельному значению |
I |
кФ |
min |
|
0н |
/ x |
|
2 max |
|
|
2 |
||
При изменении знака скольжения меняется фаза тока ротора (рис. б). В результате меняется направление лишь активной составляющей тока ротора при постоянстве направления реактивной составляющей. Двигатель переходит в режим рекуперативного торможения, где активная энергия передается в источник питания АД, а реактивная – потребляется от источника и идет на создание магнитных полей в АД.
Поскольку и поток Ф и ток |
I |
пропорциональны напряжению |
|
2 |
|
питания U1, электромагнитный момент двигателя при постоянном скольжении пропорционален U12.

При U1 = const частотное регулирование скорости АД находит применение лишь при 1 (f1 f1н), т.е. в зоне скоростей выше основной (при
двухзонном регулировании скорости). В этой зоне с ростом частоты уменьшается магнитный поток и перегрузочная способность АД по моменту
Частотное регулирование скорости ниже основной при U1 = const связано с насыщением магнитной системы и, как следствие, с резким увеличением тока статора даже при идеальном холостом ходе. Поэтому при скоростях ниже основной одновременно с частотой необходимо менять и напряжение питания АД.
Статические характеристики АД при U1 / f1 = const и 1 = const.
частотное регулирование скорости АД при U1/f1 = const обеспечивает постоянство магнитного потока Ф лишь при идеальном холостом ходе.
При увеличении нагрузки на валу АД из-за падения напряжения в цепи статора и уменьшения ЭДС Е1 магнитный поток Ф уменьшается и тем заметнее, чем меньше
В результате уменьшения Ф по мере снижения скорости уменьшается и максимальный электромагнитный момент АД
Если при регулировании скорости по закону U1 / f1 = const обеспечить полную компенсацию падения напряжения на активном сопротивлении
статорной цепи |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
U1 I1R1 |
|
то для при R1 = 0 |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Ф |
U1 |
|
|
|
|
|
R2 |
x2 sа |
|
|
|
|
|
|||
к 0н |
|
|
|
1 2 |
2 |
1 |
1 |
|
2 |
2 s |
а |
|||||
|
|
|
|
|
c R |
x |
c x |
2 |
|
|
||||||
U1 1 0н 2 f1 1
Статические характеристики АД при 2 = const
Если при частотном регулировании обеспечить компенсацию падения напряжения на полном сопротивлении статорной цепи и скомпенсировать влияние реактивностей рассеяния ротора АД