

Следящие системы аэп
Следящие системы –это системы, управляющие перемещением объекта регулирования. В таких системах главная обратная связь по положению.
Следящие системы бывают гидравлические, пневматические и электрические. В промышленных установках находят применение в станках с ЧПУ, роботах-манипуляторах.
Основной характеристикой следящей системы является точность, с которой они отрабатывают заданное перемещение, которое зависит от исполнения системы и режимов работы (режим позиционирования, режим отработки линейно изменяющегося сигнала и т.д.). Самый простой из режимов – режим позиционирования. Эти системы и находят наибольшее распространение.
Структурная схема и режимы работы позиционной системы аэп
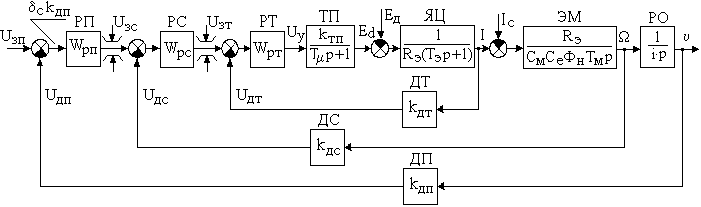
Задачей позиционного АЭП является перемещение рабочего органа из одного положения в другое. Основной характеристикой этой системы является быстрота и точность отработки задающих сигналов. Т.к. в процессе отработки перемещения требуется контролировать ток и скорость двигателя на определенном уровне, то все современные позиционные системы АЭП являются трехконтурными с подчиненным регулированием параметров. Структурная схема позиционного АЭП представлена на рисунке 6.1.
Рисунок
6.1
Режим малых перемещений, при котором не один из регуляторов не выходит на ограничение, т.е. система ведет себя как линейная.
Режим средних перемещений – в этом режиме регуляторы положения и скорости выходят на ограничение, т.е. система перестает быть линейной, но скорость в процессе отработки не выходит на максимальный установившийся уровень. Тахограмма режима средних перемещений изображена на рисунке 6.2.
Режим больших перемещений – регуляторы положения и скорости выходят на ограничение, привод разгоняется до максимальной скорости, некоторое время на ней работает. Тахограмма режима больших перемещений, в соответствии с рисунком 6.3, имеет вид трапеции.
Рисунок
6.2
Рисунок
6.3


Оптимизация контура положения для режима малых перемещений
Полагаем, что контура тока и скорости уже оптимизированы и остается оптимизировать только контур положения. Тогда структурная схема примет вид, представленный на рисунке 6.4.
Рисунок
6.4

Передаточная функция замкнутого контура скорости, оптимизированного на модульный оптимум имеет вид
 ,
,
где Тс = 4Тт – малая постоянная времени оптимизированного контура скорости (Тсмо = 2Тт, ТсСО = 4Тт).
Настроим контур на модульный оптимум. При такой настройке ЛАЧХ имеет вид, представленный на рисунке 6.5.
Тогда передаточная функция разомкнутого контура положения, настроенного на модульный оптимум, примет вид
![]() ,
,
где Кдп, Кдс – коэффициент передачи датчика положения и скорости соответственно.
Передаточная функция регулятора положения будет равна
![]() ,
,
где i – передаточное число редуктора.
![]() .
.
Получили П-регулятор положения и астатическую систему по заданию.
 ,
,
где Тп = 2Тс – эквивалентная постоянная времени оптимизированного на модульный оптимум контура положения.
Тп = 2Тс = ... = 8Т
Полученная система по заданию является астатической 1-го порядка по заданию. Если контур скорости был оптимизирован на СО и регулятор скорости был ПИ, то данный контур положения будет астатическим даже с П-регулятором.
Знак ошибки зависит от направления действия статического активного момента (см. рисунок 6.6).
Рисунок
6.5
Рисунок 6.6


Рисунок 6.7

![]() ;
;
![]() ;
;
![]() –фактическое
значение перемещения.
–фактическое
значение перемещения.
По аналогии находим заданное перемещение
 .
.
Считаем, что коэффициент регулятора по заданию и каналу ОС одинаковы, т.е. Rзп = Rдп.
Определим величину ошибки
![]() ;
;
![]() –не
зависит от величины задающего сигнала,
а зависит от момента на валу и параметров
системы.
–не
зависит от величины задающего сигнала,
а зависит от момента на валу и параметров
системы.
Если
контур скорости настроен на СО (регулятор
скорости ПИ), то
![]()