

2. Основные теоретические положения
Основой для расчета пусковых сопротивлений и уставок аппаратов автоматического пуска двигателя является пусковая диаграмма, представляющая собой семейство механических или скоростных характеристик двигателя. Такая диаграмма для рассматриваемой схемы приведена на рис. 2. Диаграмма приведена для условного направления вращения двигателя «вперед». Там же приведена часть силовой схемы привода, при использовании которой реализуется данная пусковая диаграмма.

Рис. 2. Пусковая диаграмма и необходимые
для ее реализации элементы якорной цепи двигателя
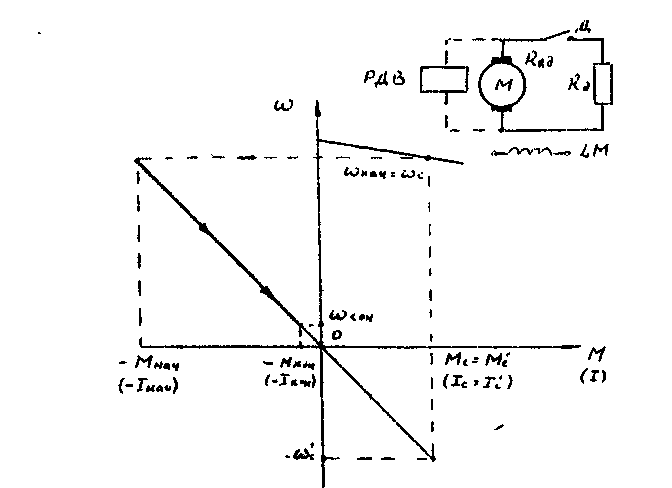
Рис. 3. Механические характеристики и элементы якорной цепи двигателя
в режиме динамического торможения
Приняты следующие обозначения: I - ток якоря; М - момент двигателя; ω - угловая скорость вращения якоря; I С – статический ток якоря; Мс – статический момент на валу двигателя; М1 (I1) и М2 (I2) – соответственно моменты и токи переключения; ω1 - скорость в конце первой ступени пуска; ω2 -скорость в конце второй ступени пуска; ωс – установившееся значение скорости при пуске на естественную механическую характеристику; ω01, ω02 - соответственно, установившиеся значения скорости при пуске на первую и вторую механические характеристики; Rяд - сопротивление якоря двигателя; Rя1 - сопротивление якоря цепи на первой ступени пуска; Rя2 - сопротивление якорной цепи на второй ступени пуска; R1 - сопротивление первой ступени пускового реостата; R2 - сопротивление второй ступени пускового реостат; U - напряжении питания якорной цепи; КУ1, КУ2 - контакты контакторов ускорения; LM - обмотка возбуждения двигателя.
Сопротивление первой
пусковой ступени равно: ![]() .
.
Сопротивление второй
ступени: ![]() .
.
Сопротивление первой ступени пускового реостата:
![]() .
.
Сопротивление второй ступени
пускового реостата: ![]() .
.
При заданном значении М1
и числе ступеней пускового реостата,
равном двум, однозначно определяется
момент М2:
![]() .
.
При использовании графоаналитического метода
![]() .
.
Для рассматриваемого случая пуска при линейно изменяющемся динамическом моменте ток якоря, скорость якоря и момент двигателя изменяются на первой ступени пуска по закону:
![]() ;
;
![]() ;
;
![]() .
.
На второй ступени пуска
![]() ;
;
![]() ;
;
![]() .
.
Ha третьей ступени пуска (пуска по естественной характеристике):
![]() ;
;
![]() ;
;
![]() .
.
В вышеприведенных выражениях:
![]() -
электромеханическая постоянная времени
первой пусковой механической
характеристики, где:J
- суммарный момент инерции электропривода,
приведенный к валу двигателя; С -
конструктивный коэффициент электродвигателя;
Ф - поток возбуждения.
-
электромеханическая постоянная времени
первой пусковой механической
характеристики, где:J
- суммарный момент инерции электропривода,
приведенный к валу двигателя; С -
конструктивный коэффициент электродвигателя;
Ф - поток возбуждения.
![]() - электромеханическая постоянная времени
на второй пусковой
механической характеристике;
- электромеханическая постоянная времени
на второй пусковой
механической характеристике;
![]() электромеханическая постоянная времени
на естественной механической
характеристике.
электромеханическая постоянная времени
на естественной механической
характеристике.
Причем
![]() ,
,
где Uном - номинальное напряжение двигателя;
Iном - номинальный ток двигателя;
ωном - номинальная скорость двигателя.
Время разгона на первой пусковой характеристике
![]()
Время разгона на второй пусковой характеристике
![]()
Время разгона на естественной характеристике
![]()
При исследовании последних формул предполагается что переходной процесс заканчивается при достижении момента (тока) двигателя значения 1,05 Мс, а скорость 0,95 ωс.
Основой для расчета значения сопротивления динамического торможения и времени торможения является механическая или скоростная характеристики. Такая характеристика переведена на рис. 3. Там же приведена схема якорной цепи двигателя, в которой реализуется динамическое торможение. На рисунке приняты обозначения: Мнач(Iнач) - начальный момент (начальный ток) торможения; ωнач - начальная скорость торможения; Мкон(Iкон) - конечный момент (конечный ток) торможения; ωс - статическая скорость в двигательном режиме работы; ω′с - статическая скорость в тормозном режиме работы; I′с - статический ток в тормозном режиме работы. Остальные обозначения те же, что и на рис. 1 и 2.
Сопротивление динамического торможения определяется по формуле
![]() .
.
При торможении со скорости ωнач до конечной скорости ωкон скорость якоря, ток якоря и момент двигателя изменяются по закону
![]() ;
;
![]() ;
;
![]() ;
;
![]() - электромеханическая постоянная времени
в режиме динамического торможения.
- электромеханическая постоянная времени
в режиме динамического торможения.
Время торможения определяется по формуле
![]()
Следует помнить, что в вышеприведенных формулах значения скоростей, моментов и токов берутся из графиков механических или скоростных характеристик с учетом их знаков.
В рассматриваемом электроприводе для реализации торможения в функции скорости параллельно обмотке якоря двигателя включают обмотку реле динамического торможения, как показано на рис. 3 пунктиром (в качестве примера для торможения с вращения «вперед»).
Уставка напряжения отпускания реле динамического торможения равна:
![]()
Уставка срабатывания максимально-токовых реле PMl, PM2 в якорной цепи
![]() ,
,
где Iп - пусковой ток двигателя.
Значение номинального тока плавких вставок предохранителей, защищающих цепи управления рассматриваемой схемы и обмотку возбуждения двигателя от токов короткого замыкания:
![]() ,
,
где IкатΣ - суммарный ток катушек максимального количества одновременно выключенных аппаратов; Iовм.ном - номинальный ток обмотки возбуждения.
Уставка тока отпускания реле РНТ в цепи обмотки возбуждения, исключающего работу двигателя при недопустимо ослабленном потоке возбуждения:
![]() .
.
Уставка напряжения отпускании реле РН, осуществляющего защиту от самозапуска и чрезмерного снижения напряжения питающей сети:
![]() ,
,
где Uном - номинальное напряжение питающей сети постоянноготока.
Защита от перенапряжений цепей управления и обмотки возбуждения осуществляется разрядным сопротивлением, величина которого при напряжении питающей сети управления и ОВМ 220 В равна (6,…)Rэкв ,
где Rэкв - эквивалентное сопротивление параллельного соединения обмотки возбуждения и максимального количества катушек одновременно включенных аппаратов.
Методика расчета уставок электрических аппаратов и элементов силовой схемы релейно-контакторных систем электропривода более подробно изложена в разделе 2.