

6.1.1. Передаточные функции однократных сар положения
Будем рассматривать САР положения как динамическую систему, имеющую два входа и три выхода. Входными являются задающее воздействие uзп и активный момент статического сопротивления на валу двигателя mc (для САР положения это возмущающее воздействие). Выходными величинами являются угол поворота вала двигателя Θ (главная регулируемая величина), скорость ω и электромагнитный момент двигателя m (подчиненные координаты). Задача исследования заключается в определении и анализе реакций САР на внешние воздействия в линейной зоне действия регуляторов.
Из анализа модели объекта (рис. 6.4.) очевидно, что выходные величины (угол, скорость и момент) подвержены влиянию как задающего, так и возмущающего воздействия.
Анализируемая схема базируется на принципе суперпозиции и соответствует следующим операторным уравнениям реакции САР положения на внешние воздействия:

Здесь p=d/dt - оператор дифференцирования по времени.
Первое уравнение описывает реакцию по положению, а второе - по скорости и третье - электромагнитному моменту двигателя. Согласно приведенным выше операторным уравнениям результирующая реакция по каждой из координат есть сумма двух частных реакций: на управление и на возмущение. Для описания звеньев эквивалентной структурной схемы вводятся следующие условные обозначения их операторных передаточных функций:

Рис. 6.4. Эквивалентная структурная схема модели САР положения
![]() - передаточная функция САР по управлению
при рассмотрении реакции по положению;
- передаточная функция САР по управлению
при рассмотрении реакции по положению;
![]() -
передаточная функция САР по управлению
при рассмотрении реакции по скорости;
-
передаточная функция САР по управлению
при рассмотрении реакции по скорости;
![]() -
передаточная функция САР по управлению
при рассмотрении реакции по моменту;
-
передаточная функция САР по управлению
при рассмотрении реакции по моменту;
![]() -
передаточная функция САР по возмущению
при рассмотрении реакции по положению;
-
передаточная функция САР по возмущению
при рассмотрении реакции по положению;
![]() -
передаточная функция САР по возмущению
при рассмотрении реакции по скорости;
-
передаточная функция САР по возмущению
при рассмотрении реакции по скорости;
![]() -
передаточная функция САР по возмущению
при рассмотрении реакции по моменту.
-
передаточная функция САР по возмущению
при рассмотрении реакции по моменту.
Для определения указанных частных передаточных функций эквивалентной модели целесообразно предварительно преобразовать расчетную схему рис. 6.3 к виду, показанному на рис. 6.5.
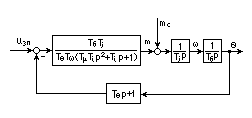
Рис. 6.5. Эквивалентная одноконтурная модель многоконтурной
однократной САР положения
Используя данную модель, легко получить следующие выражения всех частных передаточных функций позиционной САР: по управлению
![]()
![]()
![]()
и по возмущению
![]()
![]()
![]()
Первое выражение (главный оператор позиционной САР) при настройке регуляторов тока, скорости и положения на модульной оптимум, т.е. при
Тi =2Тμ ; Tω= 2Ti ; Тθ =2Тω (6.1)
совпадает со стандартной передаточной функцией трехконтурной системы подчиненного регулирования, чего и следовало ожидать.
Приведенные формулы справедливы не только для случая оптимальной настройки регуляторов, но и при вариации их параметров Тi, Тω или Тθ, например, для устранения перерегулирования при позиционировании. В случае оптимальной настройки (6.1) получаем
![]()
![]()
![]()
![]()
![]()
![]()
Для оценки реакции однократных САР положения на внешние воздействия найдем аналитическое решение задачи при нулевых начальных условиях и при отсутствии статической нагрузки, которые соответствуют полученным частным передаточным функциям
![]()
![]()
![]()
где τ = t/Tω ; Tω = 4Tμ .
Как видно, при изменении задающего воздействия трехконтурная СПР нормирует реакцию электропривода по главной регулируемой координате, т.е. по положению независимо от параметров объекта регулирования. Параметры графика θ(t) соответствуют стандартам третьего контура СПР, для которого время достижения максимума равно 18 Тμ при перерегулировании 6.2%.
Согласно дифференциальным уравнениям объекта регулирования
![]()

Рис. 6.6. Реакция однократной САР положения
на скачок задающего воздействия
подчиненные координаты (скорость и электромагнитный момент двигателя) являются в общем случае функциями высших производных главной координаты по времени и параметров объекта. Максимальное значение скорости в процессе отработки позиционного перемещения зависит от величины скачка задания и от выбранного быстродействия САР:
![]()
Экстремальные значения момента и тока якоря двигателя при разгоне и торможении зависят не только от названных выше факторов, но и от момента инерции электропривода и величины статической нагрузки. Поэтому с позиций ограничения момента и тока на допустимых уровнях являются нежелательными как большие скачки задания, так и неоправданно завышенное быстродействие САР (т.е. малые значения Тμ и Тω).
Аналитические выражения, отражающие реакцию САР на возмущение в виде скачка активного момента статического сопротивления на валу двигателя соответствующее ранее записанным передаточным функциям при нулевых начальных условиях и при нулевом значении задающего воздействия, имеют вид
![]()
![]()
где τ = t/Тω ; Тω = 4Тμ .
Так как скачок активной нагрузки на валу двигателя вызывает в позиционной САР временное (динамическое) изменение скорости, то при этом совершается определенное пространственное перемещение. Величина этого перемещения пропорциональна величине нагрузки:
![]() .
.
Поскольку задающее воздействие для позиционной САР равно нулю, то данное перемещение представляет собой статическую ошибку по положению, вызванную приложением активной статической нагрузки к валу двигателя. Из приведенной формулы видно, что при прочих равных условиях величина ошибки будет тем ниже, чем меньшей выбрана некомпенсируемая постоянная времени СПР, т.е. чем меньше значения Тω = 4Тμ и Тθ = 8Тμ. Кроме того, статическая ошибка зависит от механической постоянной времени Tj . Поэтому позиционные приводы с относительно большим моментом инерции обладают меньшей статической ошибкой, чем малоинерционные.

Рис. 6.7. Реакция однократной САР положения на скачок активной
нагрузки на валу двигателя
Время реакции позиционной САР на возмущение можно приближенно оценивать по времени восстановления скорости
![]() .
.
Исходя из вышеизложенного, следует, что рассмотренная однократная САР положения, также как и однократная САР скорости, обладает астатизмом первого порядка по отношению к задающему воздействию и астатизмом нулевого порядка по возмущению. Итак, по отношению к возмущению данная система является статической САР.
Выражение статической механической характеристики электропривода с однократной САР положения можно получить непосредственно из операторных уравнений реакций САР путем постановки р = 0 . С учетом полученных выше выражений частных передаточных функций позиционной САР в результате имеем:
![]()
![]()
![]() .
.
График характеристики позиционной САР изображен на рис. 6.8.
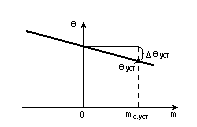
Рис. 6.8. Механическая характеристика позиционной САР
Таким образом, рассмотренный электропривод не обладает абсолютно жесткой позиционной статической характеристикой, т.е. в установившемся режиме угол поворота вала двигателя зависит как от задания, так и от нагрузки на валу.