

Контрольные вопросы
1. Какие цели преследуются при введении ограничений переменных в регулируемых САР?
2. Из каких соображений выбирается ширина зоны нечувствительности нелинейного звена, включаемого в цепь обратной связи регулятора?
3. Поясните принцип действия задатчика интенсивности, как устройства ограничивающего темп изменения скорости САР.
4. Какие параметры задатчика интенсивности являются настраиваемыми при выборе желаемого темпа изменения скорости САР?
5. Можно ли с помощью нелинейного звена ограничения в цепи обратной связи регулятора скорости ограничить динамическую составляющую тока якоря?
6. Системы автоматического регулирования положения
Системы автоматического регулирования положения (позиционные САР) строятся путем дополнения рассмотренных ранее САР скорости системой автоматического регулирования положения (или угла поворота вала двигателя, определяющего пространственное положение механизма). С этой целью используют замкнутую систему регулирования по отклонению, для построения которой (рис. 6.1) необходимы датчик положения (или угла поворота вала) ДП, регулятор положения РП и командное устройство КУ, которое вырабатывает сигнал задания положения uзΘ. Регулятор положения формирует заданиеuзсдля подчиненной ему САР скорости. Таким образом, для регулирования положения используется трехконтурная структура, содержащая внутренний контур регулирования тока якоря, промежуточный контур регулирования скорости и внешний контур регулирования положения. Промежуточная САР скорости может быть как одно-, так и двукратной, что предопределяет и тип САР положения.
6.1. Однократные сар положения
Рассмотрим сначала изображенную на рис. 6.1 позиционную САР с подчиненной регулятору положения однократной системой регулирования скорости.
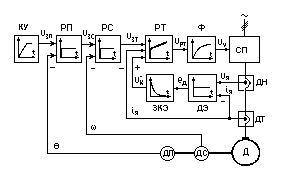
Рис. 6.1. Функциональная схема однократной САР положения
Будем называть такую систему статической или однократной САР положения. Структурная схема модели этой системы изображена на рис. 6.2.

Рис. 6.2. Структурная схема модели САР положения
Синтез регулятора положения
целесообразно производить по стандартной
методике. Для расчетов параметров
регулятора удобно использовать упрощенную
расчетную схему, в которой подчиненная
регулятору положения однократная САР
скорости представлена эквивалентной
моделью с передаточными функциями по
управлению
![]() и по возмущению
и по возмущению![]() .
.
Звено объекта в контуре
положения является интегрирующим и
имеет передаточную функцию
![]()
где Тб = 1с - базисная постоянная времени.
При упрощенном рассмотрении
датчик положения считаем идеальным,
т.е. принимаем передаточную функцию
датчика
![]()
Действующее на промежуточную САР внешнее возмущение mc на этапе синтеза регулятора положения не учитывается. Согласно стандартной методике синтеза передаточная функция регулятора положения
![]()
где TΘ = 2Тω = 4Тi = 8Тμ - постоянная интегрирования, выбираемая по условию настройки САР положения на модульный оптимум.
В итоге получаем пропорциональный регулятор положения с передаточной функцией
![]()
Полученная формула справедлива, когда коэффициенты передачи датчиков скорости kдс = 1 и положения kдп = 1. В более общем случае передаточная функция регулятора положения имеет следующий вид:
![]()

Рис. 6.3. Расчетная схема позиционной САР
Итак, применение стандартной методики синтеза приводит нас к регулятору положения П - типа , что и отражено на приведенной выше функциональной схеме САР. Дальнейшая задача заключается в оценке свойств системы при отработке не только задающих воздействий, но и внешних возмущений, не учтенных при синтезе регулятора положения.