

4.4. Синтез регулятора скорости
Рассмотрение принципов синтеза регуляторов скорости начнем с однократной системы регулирования скорости.
Однократная САР скорости выполняется в виде замкнутой системы с регулированием по отклонению. Для ее построения на базе САР тока необходимы дополнительные элементы: регулятор скорости PC, датчик скорости ДС и командное устройство, которое формирует сигнал задания скорости uзс. Регулятор скорости формирует задание uзт для подчиненной ему системы peгулирования тока якоря. Таким образом, для регулирования скорости используется двухконтурная система, содержащая внутренний контур регулирования тока якоря и внешний контур регулирования скорости.
Синтез регулятора скорости производится по стандартной методике на основе математической модели данной САР. Для расчета параметров регулятора удобно использовать следующую упрощенную расчетную схему (рис. 4.16), на которой подчиненная регулятору скорости система регулирования тока якоря представлена эквивалентным звеном с передаточной функцией Фi(р). Звено объекта в контуре скорости имеет передаточную функцию по управлению
![]() .
.
В первом рассмотрении датчик скорости считается идеальным, т.е. передаточная функция датчика Dω(p) = 1.
Действующее на звено объекта внешнее возмущение mc в первом рассмотрении не учитывается.

Рис. 4.16. Расчетная схема однократной САР скорости
Согласно стандартной методике передаточная функция регулятора скорости
![]() ,
,
где Тω =2Тi = 4Тμ – постоянная интегрирования, выбираемая по условию настройки САР на модульный оптимум.
В итоге получаем пропорциональный регулятор скорости с передаточной функцией
![]() .
.
Полученное выражение справедливо при условиях, когда kдт = 1 и kдс =1. В более общем случае передаточная функция РС равна
![]() .
.
Итак, применение стандартной методики синтеза приводит нас к регулятору скорости П - типа , что и отражено на приведенной выше функциональной схеме САР . Дальнейшая задача заключается в оценке свойств системы при отработке не только управляющих воздействий, но и внешних возмущений, не учтенных при синтезе регулятора скорости.
В заключение поясним происхождение термина однократно-интегрирующая САР, используемого в технической литературе для обозначения рассматриваемых САР скорости [3]. Этот термин связан с видом результирующей передаточной функции разомкнутой САР скорости
![]() .
.
Как видно из приведенного выражения результирующая передаточная функция разомкнутой САР содержит одно интегрирующее звено с постоянной интегрирования Тμ и одно оптимально демпфированное звено второго порядка. В связи с этим системы данного типа называют однократно-интегрирующими. Как известно из теории автоматического регулирования, при наличии в разомкнутой структуре только одного чисто интегрирующего звена система в замкнутом состоянии обладает астатизмом первого порядка по задающему воздействию. Это означает, что при постоянном значении задания и единичной обратной связи такие системы отрабатывают это задание с нулевой установившейся ошибкой.
Рассмотрим подробнее реакции САР скорости на задающее и возмущающее воздействия.
Вначале рассмотрим реакцию САР на задающее воздействие типа скачка, при этом полагаем, что возмущающее воздействие mс равно нулю. Кроме того, считаем, что система функционирует в линейной зоне действия регуляторов.
Передаточные функции САР по управляющему воздействию по скорости и электромагнитному моменту будут иметь вид соответственно:
![]() (4.28)
(4.28)
 (4.29)
(4.29)
Аналитическое решение задачи во временной области соответствующее выше приведенным передаточным функциям при нулевых начальных условиях имеет вид:
![]() ;
;
![]() ,
,
где
![]() - относительное время.
- относительное время.
По своему физическому смыслу эти формулы описывают процесс разгона электропривода на холостом ходу, вызванный скачкообразным изменением задания. Временные графики приведены на рис. 4.17. Как видно из рисунка, график скорости соответствует стандартам второго контура СПР: время достижения максимума составляет 10 Тμ при nepepeгулировании 8%.
Максимальное значение электромагнитного момента двигателя при пуске определяется приближенным выражением:
![]() .
.
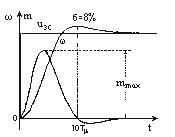
Рис. 4.17. Реакция САР скорости на скачок задающего воздействия
Из анализа полученных результатов можно сделать некоторые выводы.
1) При изменении задающего воздействия реакция САР по скорости не зависит от параметров объекта и ее быстродействие характеризуется величиной порядка 2.5Тω или же 10 Тμ.
2) Максимальные значения тока якоря и электромагнитного момента при прочих равных условиях прямо пропорциональны моменту инерции механической системы и обратно пропорциональны выбранной величине некомпенсируемой постоянной времени СПР.
3) Временные характеристики реакции САР не зависят от величины скачка задающего воздействия, что является одним из фундаментальных свойств линейных систем. Однако установившееся значение скорости, а также максимальные значения тока якоря и момента двигателя прямо пропорциональны величине скачка задания.
Далее рассмотрим реакцию САР скорости на возмущающее воздействие в виде скачка активного момента статического сопротивления на валу электродвигателя.
Передаточные функции САР по возмущающему по скорости и электромагнитному моменту будут иметь вид соответственно:
 ;
(4.30)
;
(4.30)
 .
(4.31)
.
(4.31)
Аналитическое решение задачи при нулевых начальных условиях соответствующее приведенным передаточным функциям имеет вид:
![]()
![]() ,
,
где mc.уст - величина возмущающего воздействия, соответствующая скачку активного статического момента.
По своему физическому смыслу эти формулы реакций описывают переходный процесс, вызванный скачкообразным изменением (набросом) нагрузки на валу двигателя. Временные графики изменения скорости и момента двигателя приведены на рис. 4.18. Из анализа данных графиков следует, что время реакции электропривода на приложение нагрузки оценивается величиной порядка 10Tμ, причем в течение времени от 0 до 7.6 Tμ, скорость уменьшается, а затем имеет тенденцию к восстановлению.

Рис. 4.18 . Реакция CAP на скачок возмущающего воздействия
Перерегулирование графика момента двигателя составляет 8 %, т.е. аналогично перерегулированию графика скорости при изменении задания.
Вследствие малого перерегулирования момента полного восстановления скорости не происходит. В результате имеет место установившееся падение скорости под нагрузкой
![]() .
.
Таким образом, по отношению к возмущающему воздействию однократная САР скорости обладает астатизмом нулевого порядка, т.е. является статической системой.