

3.5.2. Анализ и синтез систем стабилизации с задержанными обратными связями
В переходных процессах при подаче задающего напряжения скачком (U3 sign t) в замкнутых системах с обратными связями (отрицательной по скорости и напряжению и положительными по току) сигнал управления в начале переходного процесса пуска или торможения обычно намного превышает его установившееся значение. При этом в этих системах электропривода возникает форсировка сигнала управления преобразователем, которая уменьшается по мере разгона или торможения двигателя. Поэтому процессы разбега или торможения двигателя получаются ускоренными в начале и замедленными в конце. В начале переходного процесса форсировки могут достигать больших значений, что может приводить к возрастанию тока двигателя до недопустимых значений. Это требует введения ограничения тока и момента двигателя.
Стабилизация момента двигателя в рассматриваемых системах электропривода осуществляется с помощью отрицательной обратной связи по току, обеспечивающей резкое снижение скорости двигателя при приблизительно постоянном моменте. Связь используется с отсечкой, задерживающей действие связи при низких нагрузках. Это обусловлено необходимостью защиты двигателя или механизма от недопустимых перегрузок в статических и динамических режимах. Стабилизация момента в установившихся режимах необходима в приводах механизмов, работающих с резко переменной нагрузкой или на упор. В большинстве же электроприводов стабилизация момента используется для осуществления необходимых динамических режимов. Отсечка осуществляется введением в цепь связи опорного напряжения uоп и вентиляV (рис. 3.13, а), обеспечивающего действие связи только при превышении сигналом связиuтзначения опорного напряжения (u т>uоп). Опорное напряжение снимается с опорного потенциометраRP, включенного в цепь связи (рис. 3.13, а) или создается стабилитрономV (рис. 3.13, б). В реверсивных электроприводах используются схемы, приведенные на рис. 3.13, в, г. Применение стабилитронов исключает необходимость использования дополнительных источников напряжения.

Рис. 3.14. Функциональная схема электропривода с обратной связью
с отсечкой (а), узлы схемной реализации отсечек (б – д)
Напряжение отрицательной обратной связи по току с отсечкой определяется следующим образом:
![]() ,
,
где Iотс — ток отсечки, при котором начинает действовать отрицательная обратная связь по току; 1 (ΔI) = 1 (I - Iотс) — единичная функция по току, равная нулю при I < Iотс и единице при I > Iотс.
Электромеханические характеристики в системах с токовой отсечкой и с отрицательными обратными связями по скорости и напряжению имеют следующий вид:

Характеристика имеет два участка (рис. 3.13, д): стабилизации скорости (1(ΔI) = 0 при I < Iотс) и стабилизации момента (1 (ΔI) = 1 при I > Iотс).
Регулирование тока отсечки производится изменением опорного напряжения uоп .
Уровень стабилизации тока (момента) двигателя при действии отрицательной связи по току может быть оценен по уравнению ЭДС преобразователя, записанного для случая стопорения двигателя (ω = 0):
![]()
![]()
где Iст — ток якоря при стопорении двигателя.
В режиме стабилизации момента отрицательная обратная связь по току и отрицательная обратная связь по скорости или напряжению, осуществляющая стабилизацию скорости, противодействуют друг другу. Связь по току снижает скорость двигателя, а связь по скорости (напряжению) старается ее повысить. Поэтому в этом режиме связь по скорости (напряжению) отключают путем введения в эту связь узлов отсечки, что повышает эффективность действия токовой отсечки и улучшает переходные процессы, обеспечивая постоянство ускорения и замедления привода.
Стабилизация ускорения осуществляется с помощью стабилизации момента в переходном процессе на всем его протяжении. Это обеспечивается в системе управления электроприводом с отрицательными обратными связями по току и скорости (или напряжению) с отсечками. Эти связи позволяют сформировать требуемый закон изменения сигнала управления на входе преобразователя.
Функциональная схема системы электропривода с отрицательными обратными связями по скорости и току с отсечками приведена на рис. 3.15, а. Отсечку по току осуществляет стабилитрон V1, так как уровень стабилизации тока (момента) может быть выбран однозначно, исходя из его допустимого или требуемого значения. Отсечку по скорости обеспечивает диод V2, когда опорное напряжение (по скорости) меньше напряжения датчика обратной связи (uоп < uс). При этом напряжение обратной связи определяется следующим образом:
Uсо = (uс - uоп) 1 (Δ I) = kс (ω - ωотс)1 (Δ ω),
где ω отс — скорость отсечки, при которой начинает действовать обратная связь по скорости; 1 (Δ ω) = 1 (ω - ωотс) — единичная функция по скорости, равная нулю при ω < ω отс и единице при ω > ω отс .
Уравнение электромеханической характеристики при этом имеет следующий вид:
 .
.
Выбор значений тока отсечки Iотс и скорости отсечки ω отс, т.е. значений единичных функций, может производиться при их точном соответствии, как показано на рис. 3.15, б.
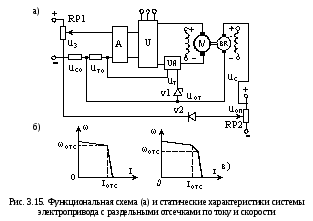
Однако практически значение скорости отсечки принимается при скорости ниже полного соответствия, т.е. при I > Iотс, как показано на рис 3.15, в. Это позволяет упростить настройку системы и исключить снижение момента перегрузки двигателя при снижении напряжения сети.
Задающее напряжение в системе электропривода с отрицательной обратной связью по скорости (напряжению) с отсечкой определяется при идеальном холостом ходе двигателя, когда 1 (Δω) = 1, а 1 (ΔI) = 0. Тогда
![]() .
.
Снижение задающего напряжения в системе с отсечкой по скорости на uос позволяет облегчить действие токовой отсечки.
Регулирование скорости в такой системе электропривода изменением задающего напряжения U3 обеспечиваться не может, так как при снижении скорости ниже скорости отсечки (ω < ωотс) обратная связь по скорости отключается. Поэтому скорость регулируется изменением значения опорного напряжения uоп, изменяющего скорость отсечки ωотс. Это является недостатком этой системы управления.
В переходных процессах отрицательные обратные связи по току и скорости с отсечками позволяют сформировать закон изменения сигнала управления на входе преобразователя при пуске двигателя с постоянным ускорением и торможении с постоянным замедлением.
Исследования таких систем в динамике можно проводить классическими или частотными методами по структурной схеме, приведенной на рис. 3.11, б, но в которой опорные напряжения по скорости и току вынесены на вход системы.