

3.5. Замкнутые системы стабилизации скорости и момента электропривода постоянного тока с суммирующим усилителем
Из широкого многообразия замкнутых СУЭП, основной функцией которых является поддержание постоянства регулируемой величины, наиболее характерны системы стабилизации скорости. Стабилизация скорости двигателя достигается посредством применения системы П-Д, имеющей одну или несколько обратных связей.
В установившихся режимах основным показателем работы системы стабилизации скорости служит точность поддержания постоянства заданной скорости при воздействии на систему различных возмущений: изменения момента нагрузки привода Мс, нестабильность и неоднозначность статических характеристик усилительных и преобразовательных элементов, колебания напряжения питающей сети, температурные изменения сопротивлений обмоток электрических машин или аппаратов и т.д.).
Точность системы определяется, в первую очередь, перепадом скорости Δωс при изменении ΔМc в заданных пределах, т.е. жесткостью или статизмом механических характеристик системы, а также «дрейфом», обусловленным прочими упомянутыми ранее возмущениями. В зависимости от требований, предъявляемых к точности стабилизации скорости и диапазона регулирования скоростиD= ωмакс/ωминприменяют различныеварианты регулирующих обратных связей.
Функциональная схема обобщенной системы стабилизации скорости двигателя постоянного тока при изменении нагрузки на его валу, обеспечивающая регулирование скорости и ее стабилизацию с высокой точностью в статических и динамических режимах приведена на рис. 3.9. Она включает в себя двигатель М, преобразователь U, промежуточный усилитель А, измерительный элемент AW (сумматор) и обратную связь.
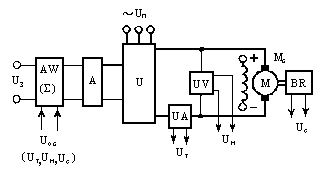
Рис. 3.9. Функциональная схема электропривода постоянного тока
В качестве преобразователей в таких системах электропривода используются генераторы постоянного тока, электромашинные и магнитные усилители и полупроводниковые (транзисторные и тиристорные) управляемые выпрямители.
В качестве промежуточных усилителей в электроприводах используются электромашинные, магнитные, транзисторные и интегральные усилители.
В системах электропривода применяются три основные жесткие обратные связи: по скорости, напряжению и току двигателя, а также их различные комбинации. Для стабилизации скорости двигателя принимаются отрицательные связи по скорости и напряжению и положительная связь по току. Для стабилизации момента двигателя применяется отрицательная связь по току и положительные связи по скорости и напряжению.
Работа электропривода в установившихся и переходных режимах при инерционном преобразователе и постоянном магнитном потоке двигателя описывается следующей системой дифференциальных уравнений:

где uз, uос, uу, uуп — напряжения: задающее, обратной связи, управления системы, управления преобразователем; еп — ЭДС преобразователя; ω — угловая скорость двигателя; М, i, Мс, — момент и ток двигателя, момент статической нагрузки; ky, kn — коэффициенты усиления промежуточного усилителя и преобразователя; kд = 1/СФ — коэффициент передачи двигателя по скорости; С — конструктивная постоянная двигателя; Тп — постоянная времени преобразователя, которая в общем виде может быть функцией его напряжения управления Тп (uу); R, L — суммарные сопротивление и индуктивность силовой якорной цепи преобразователь — двигатель, включающие сопротивления и индуктивности двигателя (Rд, Lд), преобразователя (Rп, Ln) и других элементов якорной цепи; J — момент инерции электропривода с учетом моментов инерции двигателя Jд и механизма Jмех,пр приведенного к валу двигателя (J = Jд + J мех,пр). Сигналы обратных связей в режиме стабилизации скорости, осуществляемые датчиками скорости BR, напряжения UV и тока UA, которые обычно принимаются безынерционными, соответственно равны:
при связи по скорости ис = kс ω;
при связи по напряжению ин = kнид;
при связи по току иТ = kT i ,
где kс, kн , kT - коэффициенты обратных связей по скорости, напряжению и току; ия - напряжение на якоре двигателя; i - ток якоря двигателя; ω - скорость двигателя. В качестве датчиков обратных связей по скорости, напряжению и току в системах электропривода используются тахогенераторы постоянного или переменного тока, делители напряжения и шунты или трансформаторы тока с выпрямителями соответственно.
Общее дифференциальное уравнение электропривода может быть получено решением системы дифференциальных уравнений и уравнений обратных связей. Оно имеет следующий вид:
=
Правая часть дифференциального уравнения записана условно при действии всех связей. При использовании конкретных связей в уравнении следует оставить только их коэффициенты.
Значения коэффициентов дифференциального уравнения a3, a2, а1, а0 для каждой связи при инерционном преобразователе приведены в табл. 3.1, в которой приняты дополнительные обозначения: Тя = L/R — электромагнитная постоянная времени якорной цепи двигателя; Тм = = JR/(СФ)2 — электромеханическая постоянная времени электропривода при Ф = const; Тя,д = Lд/Rд — электромагнитная постоянная времени двигателя.
Таблица 3.1
|
Коэффи-циент уравне-ния
|
Вид обратной связи | |||
|
По скорости, отрицательная |
По напряжению, отрицательная |
По току, положительная |
По току, отрицательная | |
|
а3 |
ТпТяТм |
ТпТяТм |
ТпТяТм |
ТпТяТм |
|
а2 |
(Тп+Тя) Тм |
[Тп + Тя + + kнkу kпRд Tя.д/R]* *Tм
|
(Тп+Тя) Тм |
(Тп+Тя) Тм |
|
а1 |
Тп+ Тм |
Тп + Тм(1+kнkу * *kпRд /R) |
Тп + Тм (1- Kтkу kп Rд/R) |
Тп + Тм (1+ Kтkу kп Rд/R)
|
|
а0 |
1+ kckуkпkд |
1+ kнkу kп |
1 |
1
|
Дифференциальное уравнение системы электропривода может быть получено по передаточной функции системы. Общая структурная схема системы электропривода при условном действии всех связей приведена на рис. 3.10. Из такой схемы может быть получена схема для любой связи отдельно, оставлением только нужной связи.

Рис. 3.10. Структурная схема системы
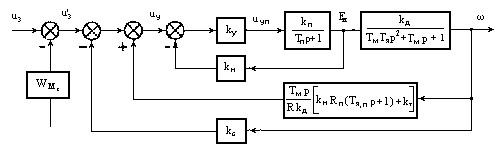
Рис. 3.11. Преобразованная структурная схема системы
Общая передаточная функция системы электропривода определяется по свернутой структурной схеме, приведенной на рис. 3.11, в которой момент статической нагрузки перенесен на вход системы, а обратные связи по току — на ее выход. В такой схеме общее воздействие на электропривод равно:
![]() ,
,
где uз — управляющее воздействие; Мс — возмущающее воздействие;
WMc (р) — передаточная функция звена, по Mc , приведенного ко входу системы, при действии всех связей
![]()
Существуют также возмущения, определяемые изменением напряжения питающей сети и температуры окружающей среды, и различные помехи, учитываемые особо.
Общая передаточная функция системы электропривода равна:

где [Wy (p) Wn (р)]3 — передаточная функция усилителя и преобразователя, замкнутых отрицательной обратной связью по напряжению (составляющей по ЭДС преобразователя), равная
![]()
Wy(p), Wп(p), Wд(р), Wн (р), WТ (р), Wс (р) — передаточные функции усилителя, преобразователя, двигателя и обратных связей по напряжению, току и скорости.
Исследование работы электропривода производится раздельно от управляющего воздействия при Мс = 0 и от возмущающего воздействия при u3 = 0 или u3 = const.
Настройка электропривода обеспечивается по установившемуся и переходному режимам, исходя из требуемого заданного статизма и качества переходного процесса.
Стабилизация скорости двигателя в установившихся режимах электропривода производится в зависимости от нагрузки. Поэтому точность стабилизации оценивается механической или электромеханической характеристикой. Характеристики рассматриваются при постоянных значениях напряжения сети и температуры окружающей среды, влияние которых компенсируется изменением коэффициентов усиления преобразователя и усилителя.
Уравнения электромеханической характеристики, записанное для случая действия всех трех обратных связей, имеет вид:

Уравнения электромеханических характеристик системы с каждой из обратных связей можно получить из общего уравнения при сохранении коэффициентов используемых связей или из дифференциального уравнения системы электропривода при МС = const и t→∞.
Уровень стабилизации скорости в замкнутой системе как погрешность Δω определяется через погрешность в разомкнутой системе Δω р

где Δω р =IRkд - погрешность в разомкнутой системе.
Погрешность в замкнутой системе электропривода зависит от значений коэффициентов обратных связей и коэффициентов усиления преобразователя и усилителя и тем ниже, чем выше значения указанных коэффициентов. Однако возможности используемых обратных связей при этом различны.
Обратная связь по скорости является связью по выходному параметру и обеспечивает наибольшую точность стабилизации скорости (при ky kn → ∞, Δω → 0).
Обратная связь по напряжению обеспечивает стабилизацию напряжения на якоре двигателя, компенсируя падение напряжения в силовой цепи преобразователя. Предельной жесткостью характеристики является жесткость естественной характеристики двигателя (при knky → ∞, Δω → IRkд).
Положительная обратная связь по току, как связь по нагрузке двигателя, обеспечивает высокую точность стабилизации скорости (при kТ ky kn /R = 1, Δω = 0). Однако это возможно только в линейных системах. В реальных системах электропривода положительная связь по току не обеспечивает высокой точности стабилизации скорости из-за наличия нелинейностей в характеристиках усилителя и преобразователя, приводящих к криволинейности электромеханических характеристик. Кроме того, система с положительной связью по току имеет малый запас устойчивости и повышает склонность системы к колебаниям.