

3.3. Математическое описание цепи возбуждения двигателя
Для построения высококачественных быстродействующих систем регулирования потока возбуждения в широком диапазоне необходимы модели цепи возбуждения, учитывающие нелинейность характеристики намагничивания и вихревые токи в элементах магнитной системы двигателя. При построении таких моделей вводятся следующие основные допущения и положения.
1) Предполагается (рис. 3.2), что магнитный поток ФΣ, инициированный намагничивающей силой FB обмотки возбуждения ОВ, может быть разложен на две автономные составляющие:
а) главный (рабочий) поток Ф, протекающий по цепи с нелинейной характеристикой намагничивания, обусловленной эффектом насыщения магнитопровода;
б) поток рассеяния Фσ, протекающий по линейной магнитной цепи и не влияющий на насыщение машины по главному магнитному пути.
2) Предполагается, что действие вихревых токов в массиве магнитопровода и токов короткозамкнутых секций обмотки якоря, вызванных изменениями магнитного потока, эквивалентно действию фиктивной короткозамкнутой обмотки ФКО, расположенной на главных полюсах машины и сцепленной только с главным магнитным потоком.

3) Число витков фиктивной обмотки принимается равным числу витков обмотки возбуждения. Величина активного сопротивления фиктивной обмотки выбирается так, чтобы потери энергии в цепи этой обмотки были равны потерям энергии реального двигателя от действия вихревых токов. Индуктивность рассеяния фиктивной обмотки не учитывается.
4) Фиктивная обмотка рассматривается не только как энергопоглощающий элемент, но и как источник намагничивающей силы Fвт, направленной по главной магнитной оси машины и оказывающей влияние на величину главного магнитного потока в динамических режимах.
При таких допущениях и условиях можно использовать электрическую схему замещения, изображенную на рис. 3.3.
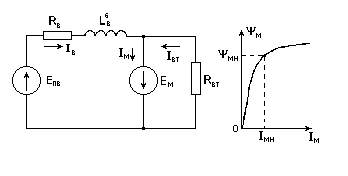
Рис. 3.3. Схема замещения цепи возбуждения и динамическая
характеристика намагничивания
Здесь и в последующих формулах приняты следующие условные обозначения:
Епв - ЭДС преобразователя;
Кпв - коэффициент усиления преобразователя;
Uyв - управляющий сигнал на входе преобразователя;
Iв , Fв - ток и намагничивающая сила обмотки возбуждения;
Iвт,Fвт - ток и намагничивающая сила фиктивной "вихревой" обмотки;
Iм , F - результирующий намагничивающий ток и намагничивающая сила по главному пути;
Ф - главный магнитный поток;
Ψм - потокосцепление обмотки возбуждения с главным магнитным потоком;
Ψσ - потокосцепление обмотки возбуждения с потоком рассеяния;
Ем - ЭДС, наводимая в обмотке возбуждения и в вихревой обмотке при изменении главного магнитного потока;
Wзв - эффективное число витков обмотки возбуждения ;
Rв - суммарное активное сопротивление цепи возбуждения, включающее активные сопротивления обмотки возбуждения и преобразователя в цепи возбуждения;
Lвσ - суммарная индуктивность рассеяния, включающая индуктивность рассеяния обмотки возбуждения и индуктивность преобразователя в цепи возбуждения;
Rвт - активное сопротивление фиктивной "вихревой" обмотки;
Ф (Iв) - статическая характеристика намагничивания машины по главному пути;
Ф(Iм) - динамическая характеристика намагничивания машины по главному пути.
В соответствии со схемой замещения модель цепи возбуждения описывается следующими уравнениями:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
В приведенных уравнениях первое уравнение описывает характеристику источника питания, второе - электромагнитные процессы в первичном (рабочем) контуре возбуждения, третье - по существу определяет результирующую намагничивающую силу по главному пути как результат действия обмотки возбуждения с учетом размагничивающего (или подмагничивающего) действия вихревой обмотки в переходных процессах. Четвертое уравнение описывает в общем виде динамическую характеристику намагничивания по главному пути (см. рис. 3.3, б). Пятое уравнение определяет главное потокосцепление обмотки возбуждения с учетом количества последовательно соединенных ее витков; шестое - определяет ЭДС, наводимую в обмотке возбуждения и в вихревой обмотке вследствие изменения главного потока в переходных процессах; седьмое - это уравнение электрического равновесия цепи вихревой обмотки.
Запишем уравнения описывающие процессы в цепи возбуждения в относительных единицах, при этом за основные базисные величины примем:
Iбв = Iв.н - номинальный ток возбуждения двигателя;
Фб = Фн - номинальный поток возбуждения;
Ψб = Ψм. н - номинальное главное потокосцепление обмотки возбуждения;
Rбв = Rв - сопротивление цепи возбуждения двигателя .
Производная базисная величина:
Uбв = Iбв Rбв - базисное напряжение возбуждения.
В соответствии с общей формулой перехода относительные значения переменных и параметров модели цепи возбуждения:

В результате перехода к системе относительных единиц получаем следующую модель цепи возбуждения:

В записанных уравнениях введены две временные константы :
![]() -
постоянная рассеяния ;
-
постоянная рассеяния ;
![]() - базовая постоянная возбуждения.
- базовая постоянная возбуждения.
Базовая величина характеризует порядок электромагнитной постоянной времени линеаризованной цепи возбуждения.
Структурная схема математической модели цепи возбуждения изображена на рис. 3.4.

Рис 3.4. Модель цепи возбуждения двигателя
Модель характеризует цепь возбуждения как нелинейную динамическую систему с пересекающимися внутренними обратными связями и нелинейностью, отражающей эффект насыщения главного магнитного пути. Характеристика нелинейного элемента НЭ может быть аппроксимирована полиномом вида
![]() ,
,
где k1, k3, k5, k7 - коэффициенты полиномиальной аппроксимации, зависящие от конкретного вида характеристики намагничивания.
Типичные графики реакции такой системы на ступенчатое изменение ЭДС возбудителя показаны на рис. 3.5. Как видно из рисунка, магнитный поток нарастает по закону, близкому к экспоненциальному. Однако ток возбуждения изменяется по более сложному закону.

Рис. 3.5. Переходный процесс в цепи возбуждения
Быстрое нарастание тока в начале процесса объясняется эффектом его трансформации во вторичный (вихревой) контур. На завершающей стадии процесса начинает проявляться эффект насыщения магнитной цепи, что вновь увеличивает темп нарастания тока возбуждения перед выходом на установившийся режим.