

КР (вариант 5)
.docxКонтрольная «Управление в БТС»
Группа 7501 Фамилия Исаков А.О.
ВОПРОС 5. Задача ЛП с ограничениями-неравенствами. Переход от нее к основной задаче.
Пусть заданы условия:





5.1. Преобразуйте неравенства в уравнения-ограничения.
5.2. Определите набор свободных и базисных переменных.
5.3. Укажите, при каких условиях задача решается геометрическим способом, а при каком вычислительным. В каком случае не требуется применения ЛП?
5.4.
Что изменится, если в третьем неравенстве
вместо знака
 будет
будет
 .
Пути решения такой изменённой задачи.
.
Пути решения такой изменённой задачи.
5.1. Преобразуйте неравенства в уравнения-ограничения
Пусть
имеется задача ЛП с параметрами

Ограничения
имеют вид неравенств

Методом
перестановки приводим к

Тогда ограничения могут принять такой вид:
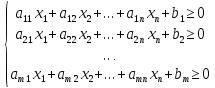
Обозначим эту систему неравенств как (*)
Требуется
найти такие неотрицательные значения
 ,
которые удовлетворяют системе неравенств
и обращают в минимум линейную функцию
L.
,
которые удовлетворяют системе неравенств
и обращают в минимум линейную функцию
L.

Используется следующий прием:
Вводятся следующие переменные
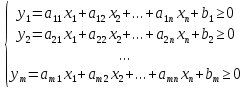
Обозначим эту систему уравнений как (**)
 –
добавочные
переменные. Они также, как и исходные,
должны быть неотрицательными
–
добавочные
переменные. Они также, как и исходные,
должны быть неотрицательными
 .
.
Тогда возникает новая ЗЛП в следующей постановке:
Найти
такие неотрицательные значения
 переменных
переменных

 ,
чтобы они удовлетворяли системе линейных
неравенств (**) и, кроме того, обращали
бы функцию
,
чтобы они удовлетворяли системе линейных
неравенств (**) и, кроме того, обращали
бы функцию
 .
.
5.2. Определите набор свободных и базисных переменных.
В
такой подстановке
 – рассматриваются
как свободные переменные.
А переменные
– рассматриваются
как свободные переменные.
А переменные
 –
рассматриваются
как базисные.
–
рассматриваются
как базисные.
Перешли к классической подстановке.
5.3. Укажите, при каких условиях задача решается геометрическим способом, а при каком вычислительным. В каком случае не требуется применения ЛП?
Отличие:
-
Функция L сразу выражена через свободные переменные.
-
Если их только 2, то используют геометрический метод (n-m=2, m – число уравнений, n – число переменных).
-
Если их больше 2-х, то используют вычислительные методы (n-m>2).
Если
 – линейные ограничения на элементы
решения
– линейные ограничения на элементы
решения ,
то чаще используют методы
линейного программирования. Если
исследуется динамика
некоторой системы,
т.е. развитие ее состояния во времени и
удается выделить некоторые промежуточные
состояния системы, то используют методы
динамического
программирования.
,
то чаще используют методы
линейного программирования. Если
исследуется динамика
некоторой системы,
т.е. развитие ее состояния во времени и
удается выделить некоторые промежуточные
состояния системы, то используют методы
динамического
программирования.
5.4. Что изменится, если
в третьем неравенстве вместо знака
 будет
будет
 .
Пути решения такой изменённой задачи.
.
Пути решения такой изменённой задачи.
Пусть
имеется задача ЛП с n
переменными
 ,
в которой ограничения, наложенные на
эти переменные, имеют вид линейных
неравенств. В некоторых из них знак
неравенства может быть ≥, в других ≤.
Второй
вид сводится к первому переменой знака
в обеих частях неравенства. Поэтому
задаем все ограничения в стандартной
форме.
,
в которой ограничения, наложенные на
эти переменные, имеют вид линейных
неравенств. В некоторых из них знак
неравенства может быть ≥, в других ≤.
Второй
вид сводится к первому переменой знака
в обеих частях неравенства. Поэтому
задаем все ограничения в стандартной
форме.
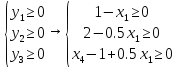
После введения дополнительных переменных:
Задача
сводится к тому, чтобы найти неотрицательные
значения переменных
 удовлетворяющие уравнениям (*) и обращающие
в минимум линейную функцию
удовлетворяющие уравнениям (*) и обращающие
в минимум линейную функцию
 .
.
Мы показали, как от задачи ЛП с ограничениями-неравенствами можно перейти к задаче с ограничениями-равенствами (ОЗЛП).
Пример
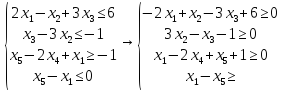
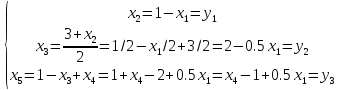
Заданы 3 уравнения:

Требуется:
-
Записать эту задачу как задачу ограничения неравенств
-
Решить основную задачу

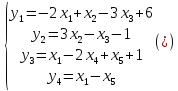
Решение:
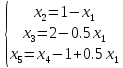
n=5 (кол-во переменных)
m=3 (кол-во уравнений)
n-m=2=k
Пусть
 и
и
 свободные переменные
свободные переменные
Осуществили обратный переход
 и
и
 свободные
свободные
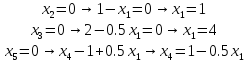
Штриховка
так, чтобы

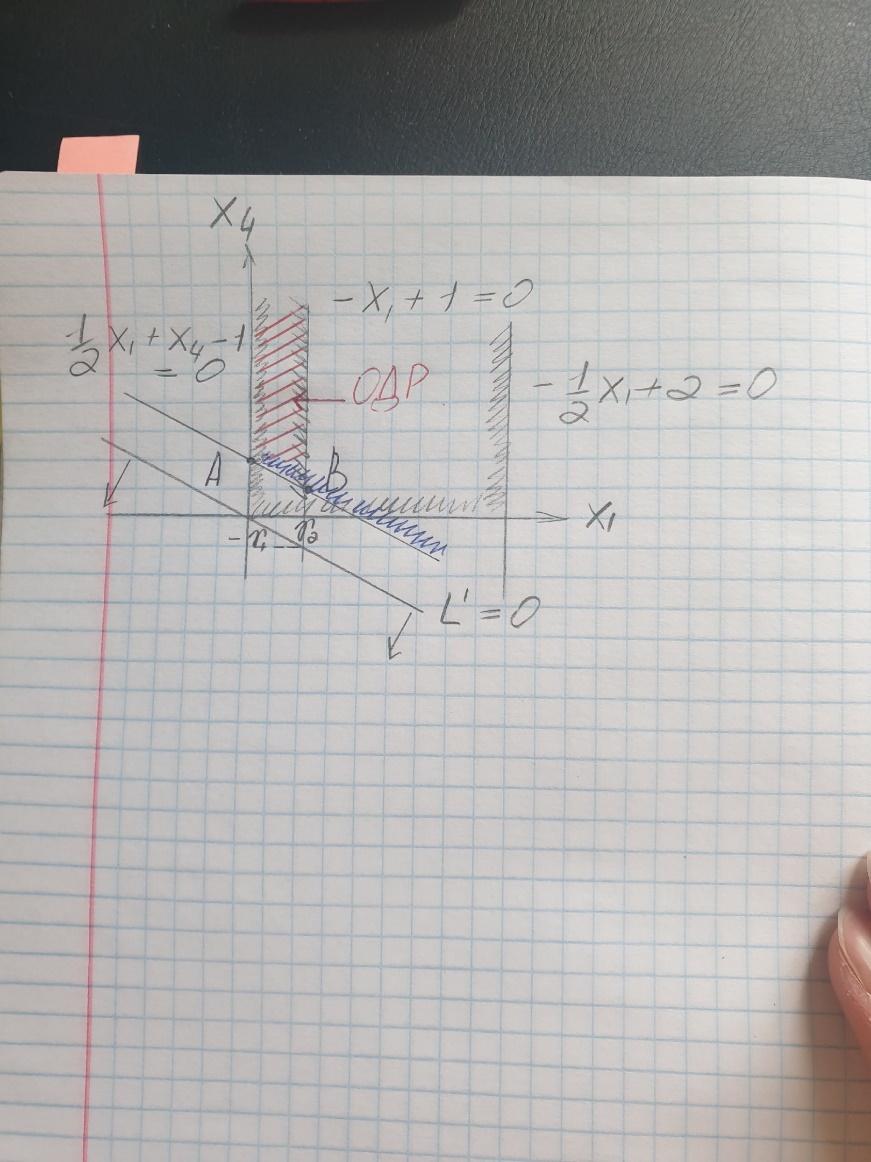



Получили открытую ОДР, следовательно, решение на [AB]
(если
бы по условию
 ,
то решения не было бы)
,
то решения не было бы)
Решение
в опорной точке (.)А:
