

Федеральное Агентство по образованию
ТОМСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ СИСТЕМ УПРАВЛЕНИЯ И РАДИОЭЛЕКТРОНИКИ (ТУСУР)
Кафедра физики
ОТЧЕТ
Лабораторная работа по курсу "Общая физика"
ОПРЕДЕЛЕНИЕ МОМЕНТА ИНЕРЦИИ ТВЕРДЫХ ТЕЛ
Преподаватель Студент группы
Июль 2009 г. Июль 2009 г.
Иркутск 2009г.
1. ЦЕЛЬ РАБОТЫ
Целью настоящей работы является изучение основных законов динамики поступательного и вращательного движений твердых тел, экспериментальное определение момента инерции блока и сравнение его с расчетным значением.
2. ОПИСАНИЕ УСТАНОВКИ И МЕТОДИКИ ЭКСПЕРИМЕНТА
Схема экспериментальной установки на основе машины Атвуда приведена на рис. 3.1.
На вертикальной стойке 1 крепится массивный блок 2, через который перекинута нить 3 с грузами 4 одинаковой массы, равной 80 г. В верхней части стойки расположен электромагнит, который может удерживать блок, не давая ему вращаться. На среднем кронштейне 5 закреплен фотодатчик 6. Риска на корпусе среднего кронштейна совпадает с оптической осью фотодатчика. Средний кронштейн имеет возможность свободного перемещения и фиксации на вертикальной стойке. На стойке укреплена миллиметровая линейка 7, по которой определяют начальное и конечное положение грузов. За начальное, принимают положение нижнего среза груза, за конечное - риску на корпусе среднего кронштейна.
Миллисекундомер 8 представляет собой прибор с цифровой индикацией времени. Опоры 9 используют для регулировки положения установки на лабораторном столе.
Принцип работы машины Атвуда заключается в следующем. Когда на концах нити висят грузы одинаковой массы, система находится в положении безразличного равновесия. Если же на один из грузов (обычно на правый) положить перегрузок, то система выйдет из равновесия, и грузы начнут двигаться с ускорением.
Машина Атвуда
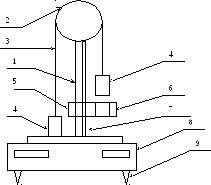
1 – стойка; 2 – блок; 3 – нить; 4 – грузы; 5 – средний кронштейн; 6 – фотодатчик; 7 – линейка; 8 – миллисекундомер; 9 – регулировочная опора.
Рис. 3.1
3. ОСНОВНЫЕ РАСЧЕТНЫЕ ФОРМУЛЫ
-
АНАЛИЗ ДВИЖЕНИЯ ГРУЗОВ И БЛОКА В МАШИНЕ АТВУДА
На рис. 4.1 приведена схема, поясняющая характер движения грузов, а также величины и точки приложения сил. Рассмотрим движение тел в машине Атвуда, используя основные законы динамики вращательного и поступательного движений.
С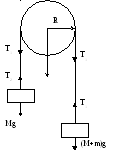 хема
приложения сил
хема
приложения сил
Рис. 4.1
Пусть основные грузы имеют массу М каждый, а перегруз массой m лежит на правом грузе (рис. 4.1). Уравнения движения грузов в проекциях на ось х запишутся следующим образом
![]() (3.1)
(3.1)
где а – ускорение движения грузов, Т1 и Т2 – соответствующие силы натяжения нитей.
Вращательное движение блока описывается уравнением
![]() (3.2)
(3.2)
где
![]() - угловое ускорение блока,
- угловое ускорение блока,
![]() -
его момент инерции,
-
его момент инерции,
![]() -
сумма моментов сил, приложенных к блоку.
-
сумма моментов сил, приложенных к блоку.
Согласно рис. 4.1
сумма моментов сил равна
![]() При движении нерастяжимой нити без
скольжения по блоку имеет место равенство
При движении нерастяжимой нити без
скольжения по блоку имеет место равенство
![]() Здесь
а
- линейное ускорение точек на поверхности
блока, а следовательно и самой нити,
Здесь
а
- линейное ускорение точек на поверхности
блока, а следовательно и самой нити,
![]() - радиус блока. Таким образом, исходная
система уравнений выглядит так
- радиус блока. Таким образом, исходная
система уравнений выглядит так
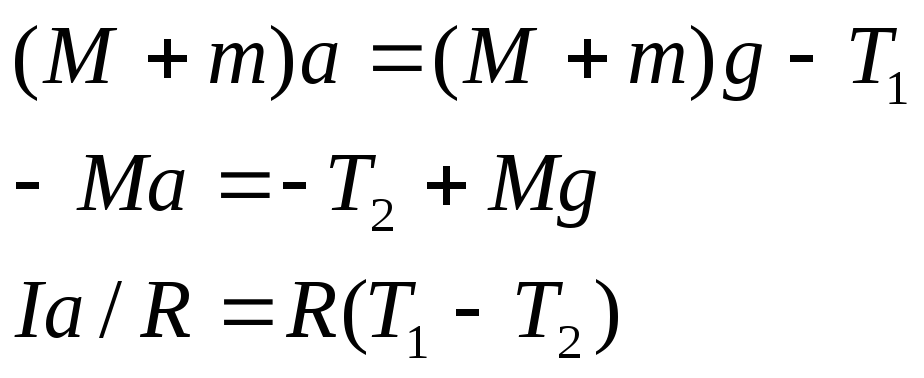 (3.3)
(3.3)
Как следует из
системы (4.3), ускорение а
есть величина постоянная в условиях
постоянства масс и момента инерции.
Т.е. грузы движутся равноускоренно.
Ускорение а
может быть
определено на основании измерения
высоты
![]() ,
на которую опустится правый груз, и
времени его движения
,
на которую опустится правый груз, и
времени его движения
![]() :
:
![]() (3.4)
(3.4)
Подставляя выражение
(4.4) в систему (4.3) и разрешая ее относительно
![]() ,
получаем
,
получаем
![]() (3.5)
(3.5)
Выражение (4.5) может быть переписано в виде
![]() (3.6)
(3.6)
где
![]() - константа, зависящая от параметров
экспериментальной установки.
- константа, зависящая от параметров
экспериментальной установки.
![]() (3.7)
(3.7)
Формула (3.6)
показывает, что в случае адекватности
рассмотренной физической модели условиям
опыта экспериментальные точки, нанесенные
на график в координатах
![]() должны укладываться на прямую линию.
Из наклона этой прямой может быть
вычислена константа
должны укладываться на прямую линию.
Из наклона этой прямой может быть
вычислена константа
![]() ,
по величине которой, в свою очередь,
может быть рассчитан момент инерции
,
по величине которой, в свою очередь,
может быть рассчитан момент инерции
![]() блока,
если другие входящие в
блока,
если другие входящие в
![]() величины
величины
![]() известны.
известны.
4. РЕЗУЛЬТАТЫ РАБОТЫ И ИХ АНАЛИЗ.
Измеренные значения и результаты их обработки приведены в таблице 4.1
Таблица 4.1 Результаты измерений времени прохождения груза
|
Номер изм. |
h1 =0,11м |
h2 =0,16м |
h3 =0,21м |
h4 =0,26м |
h5 =0,31м |
|
1 |
2,779 |
3,084 |
3,506 |
4,280 |
4,522 |
|
2 |
2,681 |
3,112 |
3,622 |
3,963 |
4,523 |
|
3 |
2,690 |
3,155 |
3,685 |
4,200 |
4,482 |
|
4 |
2,593 |
3,350 |
3,623 |
4,117 |
4,554 |
|
5 |
2,721 |
3,261 |
3,561 |
4,125 |
4,504 |
|
|
2,693 |
3,194 |
3,599 |
4,117 |
4,517 |
|
|
7,251 |
10,204 |
12,956 |
17,115 |
20,403 |
5 Обработка результатов измерений
5.1 Определить
средние значения времени
![]() и <t2
>
и <t2
>![]() прохождения грузом пути
прохождения грузом пути
![]() n=5
количество измерений в серии j=1
номера измерений в серии
n=5
количество измерений в серии j=1
номера измерений в серии
![]() ;
;
![]() ;
;
|
Номер изм. |
|
|
|
1 |
2,693 |
7,251 |
|
2 |
3,194 |
10,204 |
|
3 |
3,599 |
12,956 |
|
4 |
4,117 |
17,115 |
|
5 |
4,517 |
20,403 |
5.2 Определить
случайную, приборную и общую погрешности
измерений времени
![]() и рассчитать погрешности величин
квадрата времени
и рассчитать погрешности величин
квадрата времени
![]()
Так, как на миллисекундомере не обозначен класс точности, и он является цифровым, то его погрешность составляет 1 единица младшего
разряда т.е 0.001 с
![]() σсис(t)=0,001c
σсис(t)=0,001c
Чтобы вычислить
случайную погрешность измерения времени,
необходимо определить коэффициент
Стьюдента и среднеквадратичное
отклонение. Для серии из 5 измерений и
доверительной вероятности 0,98 определяемый
коэффициент Стьюдента![]() равен 3,7
равен 3,7
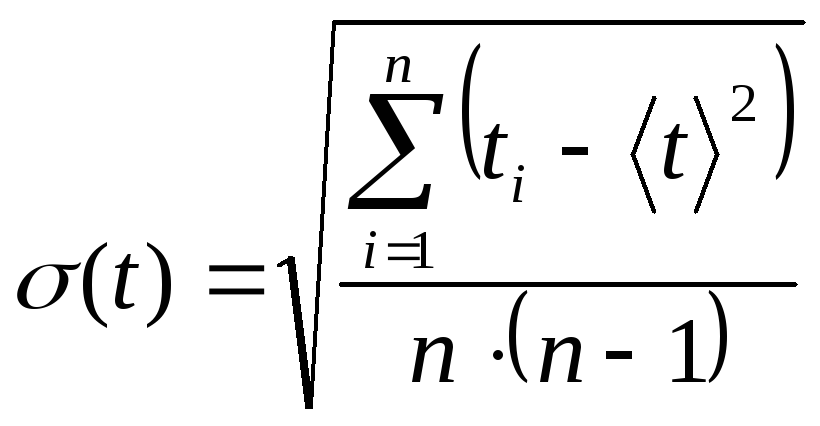
Среднеквадратичное отклонение вычисляется по формуле
 ;
;
![]() ;
;
|
Номер изм. |
|
|
|
1 |
0.03 |
0,112 |
|
2 |
0.049 |
0,181 |
|
3 |
0.03 |
0,173 |
|
4 |
0,054 |
0,681 |
|
5 |
0.012 |
0,044 |
Абсолютные
суммарные погрешности измерения времени
t
и квадратов времени
![]()
![]() ;
;
![]() ;
;
![]() ;
;
![]()
|
Номер изм. |
|
|
|
1 |
0,113 |
0,609 |
|
2 |
0,182 |
1,16 |
|
3 |
0,114 |
0,819 |
|
4 |
0,195 |
1,617 |
|
5 |
0,045 |
0,406 |
5.3 Нанести
экспериментальные точки на график в
координатах
![]() Здесь же указать погрешности в виде
доверительных интервалов.
Здесь же указать погрешности в виде
доверительных интервалов.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Угловой коэффициент
прямой равен K=
66,43![]()
Отрезок отсекаемый прямой от ос OY B= -0,364
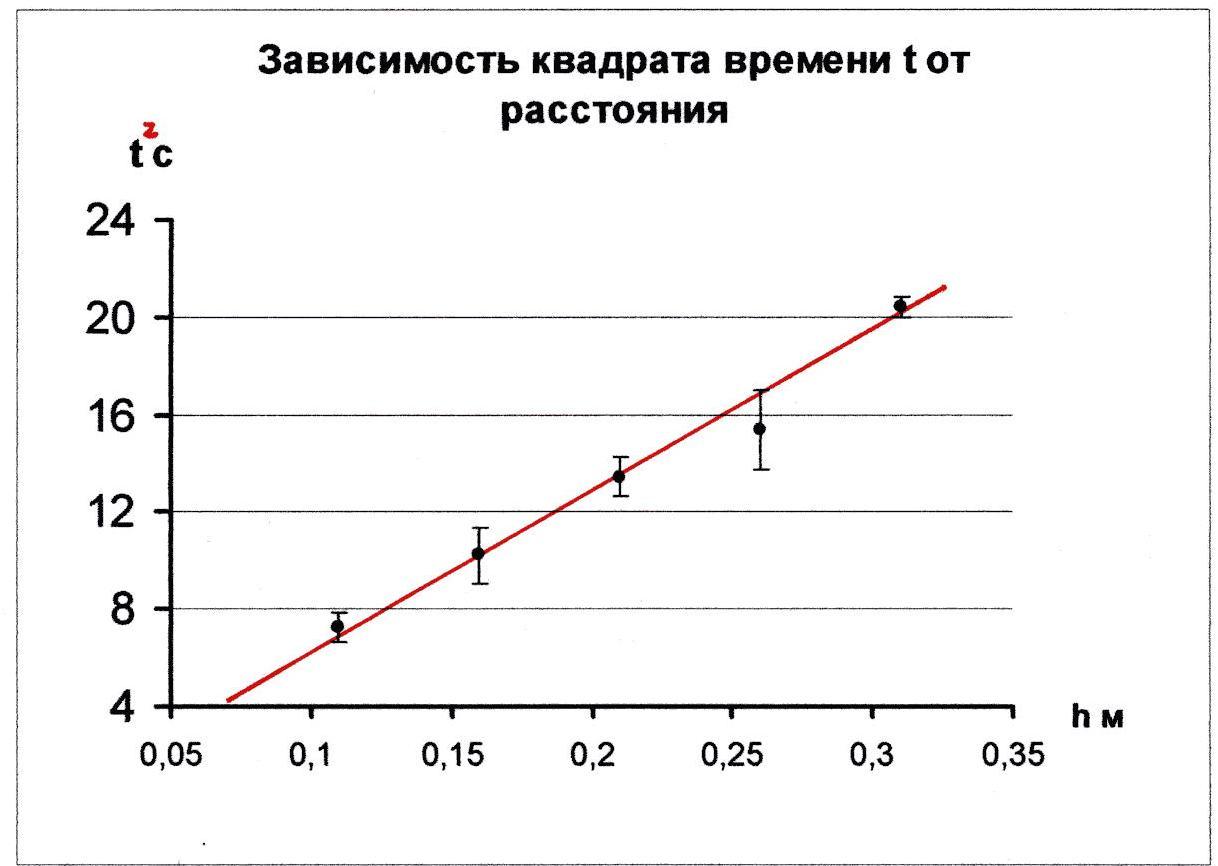
Рисунок 5.1 Зависимость
квадрата времени
![]() от
расстояния
от
расстояния
![]()
5.4 Провести интерполирующую прямую и вычислить величину k
Абсолютные погрешности вычисления параметров прямой линии
![]()
![]()
5.5 Используя
выражение (3.7) для k
и учитывая, что M=100г.
M=2г.
R=75![]() и g=9,807
и g=9,807![]() Вычислить момент инерции I
блока
Вычислить момент инерции I
блока
![]() Iex=2,528
Iex=2,528![]()
5.5 используя
геометрические параметры блока, с учетом
плотности металла, из которого изготовлен
блок (латунь
![]() )
рассчитаем его момент инерции
)
рассчитаем его момент инерции
![]()
Объем сплошного
блока
![]()
Масса блока
![]()
![]()
![]() Момент инерции
блока
Момент инерции
блока
5.7 Сравнить расчетное значение момента инерции блока с полученным экспериментально.
Полученные
экспериментальным и аналитическим
способами моменты инерции можно сравнить,
получив отличие между ними в процентах![]()
![]()
6. ВЫВОДЫ
В ходе работы изучены основы законов динамики поступательного и вращательного движений твердых тел, экспериментально определен момент инерции блока,
7. ОТВЕТЫ НА КОНТРОЛЬНЫЕ ВОПРОСЫ
7.1. Что такое момент сил и момент инерции?
Момент инерции I материальной точки относительно неподвижной оси вращения - физическая величина, равная произведению массы m материальной точки на квадрат расстояния r между точкой и осью вращения: I = m∙r2.
Скалярная величина I = ΣIi = Σ(mi∙ri2) равная сумме моментов инерции всех материальных точек твердого тела и характеризующая инерционность тела по отношению к вращению – есть момент инерции твердого тела относительно выбранной оси вращения.
7.2. Моменты каких сил действуют на блок?
Вращательное движение блока описывается уравнением
![]() где
ε – угловое ускорение блока, I – его
момент инерции,
где
ε – угловое ускорение блока, I – его
момент инерции,
![]() –
сумма моментов сил, приложенных к блоку.
–
сумма моментов сил, приложенных к блоку.
Сумма моментов сил равна T1R – T2R. При движении нерастяжимой нити без скольжения по блоку имеет место равенство ε = a/R. Здесь а – линейное ускорение точек на поверхности блока, а, следовательно, и самой нити, R – радиус блока.
7.3. Как рассчитать момент инерции блока? Сформулировать теорему Штейнера.
Момент инерции I относительно произвольной оси равен сумме момента инерции I0 относительно оси, параллельной данной и проходящей через центр масс тела и произведения массы тела m на квадрат расстояния l между осями:
I = I0 + ml².
7.4. Укажите возможные причины несовпадения экспериментальных результатов с расчетными.
- физические допущения, принятые при теоретическом анализе движения грузов в эксперименте; погрешности измерения величин; точность вычислений.
Литература
1.
Рипп А.Г. Оценка погрешностей измерений.
Методические указания к
лабораторному
практикуму по курсу физики для студентов
всех
специальностей.
- Томск: Томский межвузовский центр
дистанционного
образования, 2006. - 13 с.
2.
Бурдовицин В.А., Лячин А.В. Изучение
вращательного и
поступательного
движений на машине Атвуда. Руководство
к
лабораторной
работе по физике для студентов всех
специальностей.
-
Томск: Томский государственный
университет систем управления и
радиоэлектроники,
2006. - 10 с.
7. ПРИЛОЖЕНИЕ
К работе прилагается регистрационный файл (*.REG).