

Курсовые работы по ТАУ - Методичка, примеры (КИ МГОУ) / Курсовая ТАУ 7 вар
.docОписание работы
Курсовая работа представляет собой расчет нелинейной САУ с двухпозиционным регулятором. Рассчитывается система автоматической стабилизации сил натяжения левой и правой кромок движущейся ленты ткани. Принципиальная схема системы показана на рис.1.

Рис. 1.
Принцип действия САУ
Движущаяся ткань последовательно обходит ролики 1 и 2. Ролик 2 может поворачиваться вокруг вертикальной оси двигателем М со встроенным редуктором. Это приводит к изменению разности сил натяжения левой и правой кромок ткани на выходе системы. Обозначается эта разница сил – f (t). Она представляет собой ошибку регулирования, которая измеряется датчиком Д и выдается в регулятор Р в форме электрического сигнала:
![]() , где kD
– коэффициент передачи датчика.
, где kD
– коэффициент передачи датчика.
Регулятор Р представляет собой электрической реле и выходной сигнал описывается следующим математическим выражением:

U(t) – электрическое напряжение на выходе регулятора;
b, c – постоянные параметры статической характеристики реле.
График зависимости U (ε) показан на рис.2.
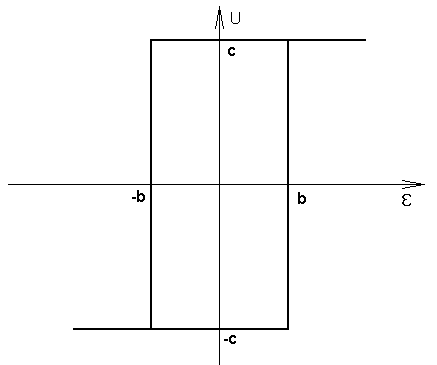
Рис. 2.
Напряжение U (t) поступает на управляющую обмотку двигателя М и обеспечивает через редуктор поворот ролика 2 в таком направлении, чтобы обеспечить уменьшение разности сил натяжения кромок ткани f (t).
Двигатель с редуктором и нагрузкой описывается уравнением:
![]()
φ (t) – угол поворота ролика 2 вокруг вертикальной оси;
fB (t) – случайно изменяющаяся во времени разность сил натяжения левой и правой кромок ткани на выходе системы, т.е. перед роликом 1 (возмущающее воздействие);
k1 – коэффициент передачи по управляющему воздействию;
k2 – коэффициент передачи по возмущающему воздействию;
Т – постоянная времени.
Разность сил натяжения ткани на выходе системы за роликом 2 вблизи датчика Д связана с разностью сил натяжения ткани на входе системы соотношением:
![]()
k3 – постоянный коэффициент преобразования угла поворота валика 2 в разность сил натяжения.
Величину напряжения C на выходе регулятора необходимо определить в процессе выполнения работы.
Исходные данные (7 вариант)
KD = 0.134 В / Н
K1 = 0.247 рад / сּВ
K2 = 0.0728 рад / сּН
K3 = 131 Н / рад
T = 0.46 c
b = 0.0104 B
Δ = 0.0129 рад
Задание
-
Построить структурную схему рассматриваемой системы автоматического регулирования. Преобразовать структурную схему таким образом, чтобы на ней было показано задающее воздействие g = 0 (соответствует идеальному алгоритму управления f (t) = 0), и чтобы при этом возмущающее воздействие поступало в замкнутый контур в одном месте.
-
С целью исследования автоколебаний привести схему к расчетной, содержащей безинерционный нелинейный элемент и линейную часть. При выполнении этого задания считать, что f (t) = 0, т.к. автоколебания представляют собой свободное движение системы.
-
Используя метод гармонической линеаризации получить гармоническую передаточную функцию нелинейного элемента.
-
Используя уравнение гармонического баланса, доказать что при любом С
 в системе возникают устойчивые
автоколебания. Найти наибольшую
величину С, при которой амплитуда
колебаний ролика не превосходит
допустимого значения
в системе возникают устойчивые
автоколебания. Найти наибольшую
величину С, при которой амплитуда
колебаний ролика не превосходит
допустимого значения
 .
Определить частоту и амплитуду этих
колебаний.
.
Определить частоту и амплитуду этих
колебаний. -
Построить зависимость амплитуды и частоты автоколебаний от величины напряжения регулятора, выбрать рабочее значение этого напряжения.
Расчёт
1. Построим структурную схему системы, для чего сначала найдем передаточные функции всех элементов системы:
Регулятор: 
Датчик: ![]()
![]()
Двигатель: ![]()
![]()
Рамка: ![]()
![]()
В результате получаем структурную схему системы, изображенную на рис.3.

Рис.3.
Преобразуем структурную схему таким образом, чтобы возмущающее воздействие поступало в замкнутый контур управления в одном месте и покажем задающее воздействие g(t) = 0. Преобразованная схема изображена на Рис. 4.

Рис.4.
2. Для применения метода гармонической линеаризации приведем схему к расчетной, т.е. содержащей безинерционный нелинейный элемент и собранную в одно звено линейную часть. Расчетная схема изображена на рис.5.
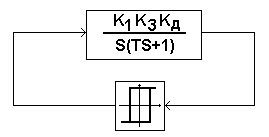
Рис. 5.
3. Метод гармонической линеаризации состоит в том, что автоколебания в системе ищутся в виде гармонического сигнала, т.е.:
![]() а
– амплитуда автоколебаний
а
– амплитуда автоколебаний
ω – частота автоколебаний
Заменим нелинейное звено эквивалентным линейным с передаточной функцией:
![]()
![]() – коэффициенты гармонической линеаризации
– коэффициенты гармонической линеаризации
Для
реле с гистерезисом: ![]()
![]()
4. Для доказательства того, что при любом с 0 в системе возникают устойчивые автоколебания воспользуемся графическим методом Гольдфарба. Из метода следует, что если равенство:
![]()
существует, т.е. соответствующие годографы пересекаются, то в системе возникают автоколебания. Для выяснения вопроса о пересечении годографов рассчитаем и построим их:

Видно, что мнимая часть годографа Z(a) не зависит от a, и следовательно он будет представлять из себя прямую параллельную действительной оси. Расстояние до нее зависит только от параметров статической характеристики нелинейного элемента. В частности, асимптотически приближается к оси при увеличении значения с.

Рис. 6.
Из графика видно, что пересечение годографов будет происходить при любом значении с, т.е. в системе всегда будут наблюдаться автоколебания.
Найдем такое значение с, при котором амплитуда колебаний ролика не превышает Δ, а это значит, что амплитуда автоколебаний на входе системы не превышает amax.
![]()
Соответствующее этой амплитуде значение с будем искать, пользуясь уравнением гармонического баланса:

Решая систему получаем:
![]()
При
a = amax : ![]()
5. При построении зависимостей ω(с) и а(с) воспользуемся только что полученными уравнениями:
![]()
Задаваясь значениями ω можно получить значения а и с. Построим эти зависимости:
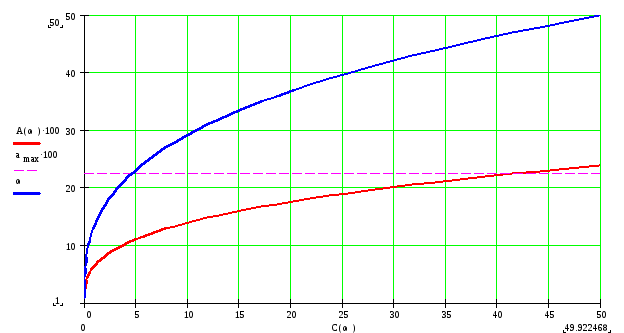
Рис. 7.
Выбираем рабочее значение напряжения регулятора с = 40 В.
Выводы.
В результате исследования автоколебаний системы
-
Построена структурная схема рассматриваемой системы управления.
-
Выведена передаточная функция линейной части системы управления.
-
С помощью метода гармонической линеаризации выведена гармоническая передаточная функция нелинейной части системы управления.
-
Доказано, что при любом с в системе будут иметь место устойчивые автоколебания.
-
Выбрано рабочее значение регулятора с = 40 В.