

ВОПРОСЫ
-
ОРЛ-А
-
ОРЛ-Т
-
ВРЛ
-
МПСН (МНОГОПОЗИЦИОННАЯ СИСТЕМА НАБЛЮДЕНИЯ)
-
АЗН-К
-
АЗН-В
-
АРП
-
VOR
-
DME
-
VOR/DME
-
DVOR/DME
-
МАРКЕРНЫЕ РАДИОМАЯКИ
-
ПРИВОДНЫЕ РАДИОСТАНЦИИ
-
СПУТНИКОВАЯ СИСТЕМА НАВИГАЦИИ
-
ЛККС
-
ССП
-
АВТОМАТИЗАЦИЯ ПРОЦЕССОВ УВД
-
АС УВД
-
КСА УВД
-
АРМ
-
СРЕДСТВА РАДИОСВЯЗИ УКВ ДИОПОЗОНА (ОВЧ)
-
СРЕДСТВА РАДИОСВЯЗИ КВ ДИОПОЗОНА (ВЧ)
-
ПЕРЕДАЮЩИЙ ПРЦ, ПРИЕМНЫЙ ПРМЦ, РАДИОЦЕНТРЫ
-
АППЦ
-
АВТОНОМНЫЙ РЕТРАСЛЯТОР
-
ОРЛ-А. Назначение, основные сведения, размещение на а/д. Типы. Характеристики
Обзорный радиолокатор аэродромный предназначен для обнаружения и
определения координат (азимут-дальность) воздушных судов в районе аэродрома с
последующей передачей информации о воздушной обстановке в центры (пункты)
ОВД для целей контроля и обеспечения управления воздушным движением.
Период обновления информации составляет не более 6 секунд.
Допускается отсутствие радиолокационной информации от ОРЛ-А в трех-пяти
обзорах подряд от воздушного судна, совершающего маневр разворота или
находящегося на участке с тангенциальным направлением скорости при
выполнении полета по стандартному маршруту захода на посадку. Антенная
система ОРЛ-А юстируется относительно магнитного меридиана.
Радиолокационная информация ОРЛ-А может использоваться для целей
контроля и управления воздушным движением во внеаэродромной зоне (на
воздушных трассах и вне трасс) в районных центрах управления воздушным
движением. В этом случае координатная информация (азимутальная), предназначенная для
районного центра, пересчитывается относительно истинного меридиана
оборудованием обработки ОРЛ-А или оборудованием управления воздушным
движения районного центра или другим специальным оборудованием.
ОРЛ-А должен быть расположен таким образом, чтобы обеспечивался РЛК за полётами ВС на контролируемых маршрутах в районе данного аэродрома. В СПб на одной позиции расположено два ОРЛ-А, основной ЛИРА А-10 и резервный ИРТЫШ, который заменяет основной 2 раза в месяц на время тех. проверок ЛИРА А-10. Расположены на возвышенности на территории Южного кладбища.
В состав оборудования ОРЛ-А должно входить:
-
АФС
-
Приёмо-передающая аппаратура, аппаратура опознавания;
-
Первичный канал радиолокатора
-
Встроенный вторичный канал радиолокатора или автономный ВРЛ, сопряжённый с ОРЛ-Т
-
Аппаратура обработки РЛК информации.
-
Аппаратура сопряжения с системами отображения воздушной обстановки или АС УВД
-
Аппаратура передачи данных
-
Система контроля, управления и сигнализации
-
Комплекты ЗИП и эксплуатационной информации.
Аэродромный РЛК
"ЛИРА-А10"
АРЛК
"ЛИРА-А10" предназначен для
использования в качестве источника
радиолокационной информации о воздушной
обстановке в зоне аэропортов для
автоматизированных и неавтоматизированных
систем УВД и обеспечивает: определение
координат и траекторий движения воздушных
судов (ВС) - как оборудованных, так и не
оборудованных ответчиками; запрос,
получение и выдачу информации, выдаваемой
бортовыми ответчиками ВС по стандарту
ИКАО и по ГОСТ 21800-89; сопряжение и выдачу
информации потребителям насистемы УВД
"Синтез", "Спектр", "Старт",
"Норд" ("Альфа"), "ТОПАЗ",
"Карм-АУ", "Карм-ДРУ" или на
другие по заказу потребителя.
РЛК
"ЛИРА-А10" является высокостабильной
системой с использованием когерентных
методов подавления мешающих отражений
и состоит из: антенного модуля, состоящего
из отражателя, двухканального облучателя,
поляризатора, опорно-поворотного
устройства, токосъемника, вращающего
сочленения, приводов азимутального
вращения и сборной башни высотой до 9
м, в зависимости от радиолокационной
позиции, набираемой секциями по 3 м;
аппаратного модуля, включающего в себя
передающую систему на базе клистронного
усилителя, состоящую из двух независимых
каналов, работающих на разных частотах,
приемную систему, цифровую систему
обработки сигнала с адаптивным
управлением, систему автоматизированного
контроля, систему электропитания и
встроенный вторичный радиолокатор;
резервную дизельэлектростанцию.
Основные
тактико-технические характеристики
трассового радиолокационного комплекса
"ЛИРА-А10":
-
Диапазон рабочих частот: первичной РЛС. S (2700 - 2900 Мгц) вторичной РЛС. международный и отечественный диапазоны
-
Пределы работы: максимальная дальность 120 км.; минимальная дальность 1,5 км ; по азимуту З60 град ;по углу места 0,5-45 град
-
Точность определения координат (СКО) на выходе АПОИ: по дальности 150 м;по азимуту 9 утл. мин
-
Разрешающая способность на выходе АПОИ: для ПРЛ: по дальности 300 м по азимуту 1,7 град; для ВРЛ: по дальности 1000 м; по азимуту 4 град
-
Вероятность объединения координат ПРЛ и ВРЛ с выхода АПОИ: по одному самолету не менее 0,95 , координатной и полетной информации. 0,96
-
Коэффициент подавления отражений от неподвижных целей 46 дб
-
Темп обновления информации 5 с
-
Скорость обнаруживаемых целей от 40 до 1500 км/ч
-
Количество одновременно сопровождаемых трасс не менее. 250
-
Мощность, потребляемая от первичной сети не более. 60 кВА
-
Среднее время наработки на отказ 7000 ч
Изготовитель КБ Лира(Россия). Также широко используются аэродромные локаторы КБ Лира типа Лира 1, Утёс-А. Стоит отметить Челябинский радиозавод «Пилот» производящий РЛ А "ОРЛ-85М" и Экран-85.
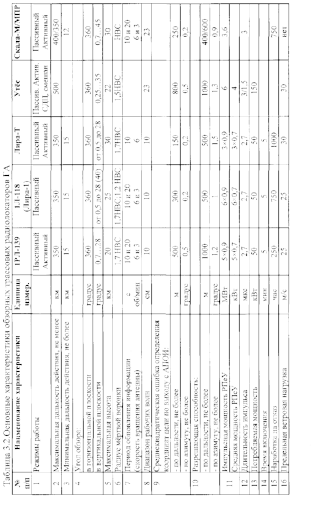
Основные характеристики ОРЛ-А
-
максимальная дальность 100-160км
-
угол обзора 360°
-
минимальная дальность 1,5км.
-
период обновления инф. 6с.
-
Диапазон волн 10см. или 23см.
-
Точность определения информации не более 200м и 0,2°
-
Разрешающая способность не хуже 500м и не хуже 4°
-
ОРЛ-Т. Назначение, основные сведения, размещение на а/д. Типы. Характеристики
Обзорный радиолокатор трассовый предназначен для обнаружения и
определения координат (азимут - дальность) воздушных судов во внеаэродромной
зоне (на воздушных трассах и вне трасс) с последующей выдачей информации о
воздушной обстановке в центры (пункты) обслуживания воздушного движения для
целей контроля и обеспечения управления воздушным движением. Антенная
система обзорного радиолокатора трассового юстируется относительно истинного
меридиана.
ОРЛ-Т должен быть размещен таким образом, чтобы обеспечить радиолокационный контроль за полётами ВС в секторах прохождения воздушных трасс данного района УВД. Место установки должно выбираться так, чтобы обеспечивался минимум переотражений по вторичному каналу (если оснащен ВРЛ). Переотражение не должно попадать в зону контролируемых ВТ. В Пулково используется Утёс-Т, работающий как по первичному(Утес), так и вторичному каналу(Лира),и расположен на территории Южного кладбища на возвышенности.
В состав оборудования ОРЛ-Т должно входить:
-
АФС
-
Приёмо-передающая аппаратура, аппаратура опознавания;
-
Первичный канал радиолокатора
-
Встроенный вторичный канал радиолокатора или автономный ВРЛ, сопряжённый с ОРЛ-Т
-
Аппаратура обработки РЛК информации.
-
Аппаратура сопряжения с системами отображения воздушной обстановки или АС УВД
-
Аппаратура передачи данных
-
Система контроля, управления и сигнализации
-
Комплекты ЗИП и эксплуатационной информации.
Основные характеристики ОРЛ-Т
-
максимальная дальность 350-400км
-
угол обзора 360°
-
минимальная дальность 40км.
-
период обновления инф. 10с.
-
Диапазон волн 10см. или 23см.
-
Точность определения информации не более 300м и 0,25°
-
Разрешающая способность не хуже 1000м и не хуже 1,3°
Трассовый обзорный радиолокатор Утёс-Т
Первичный трассовый обзорный радиолокатор комплекса УТЕС-Т работает в диапазоне дециметровых волн и является высокостабильным радиолокационным комплексом, построенным по принципу истинной когерентности. РЛК «УТЕС-Т» может комплектоваться встроенным ВРЛ. Двулучевая антенная система формирует зоны обзора в вертикальной плоскости в диапазоне от 0,5° до 45°. В горизонтальной плоскости зона обзора обеспечивается механическим вращением антенны со скоростью 6 об/мин. Вычислительное устройство позволяет вычислить координаты ВС и формирует контуры метеообразований в шести градациях. Головной процессор объединяет отметки ПРЛ и ВРЛ, выполняя функции вторичной обработки информации. Автоматизированная система контроля и управления режимами работы РЛК производится как с местного пульта, так и дистанционно. Встроенное контрольное оборудование позволяет осуществлять диагностику и поиски неисправностей. Высокая степень автоматизации РЛК наряду с его высокой надежностью обеспечивает возможность работы без постоянного присутствия на РЛК позиции персонала.
-
Оврл. Назначение, основные сведения, размещение на а/д. Типы. Характеристики
Вторичный радиолокатор предназначен для обнаружения, определения
координат (азимут-дальность), запроса и приема дополнительной информации от
воздушных судов, оборудованных ответчиками, с последующей выдачей
информации в центры (пункты) ОВД.
Участок ВРЛ должен быть размещен таким образом, чтобы обеспечить непрерывный РЛК ВС, оборудованным самолётными ответчиками на контролируемых маршрутах. В секторах прохождения основных контролируемых трасс величины углов закрытия по углу места с высоты расположения фазового центра не должны превышать 0,5°. В радиусе 1,5км от места размещения ВРЛ не должно быть крупных металлических и железобетонных конструкций и сооружений, которые могут создавать переотраженные сигналы по вторичному каналу радиолокатора.
Основные характеристики:
-
Режимы работы УВД и RBS
-
Максимальная дальность 400км для ВРЛ-Т и 250-150км для ВРЛ-А
-
Минимальная дальность не более 2км.
-
Период обновления информации 6-10с.
-
Частота работы 1030мГц
-
Разрешающая способность не хуже 1000м и 4°
-
Вероятность получения достоверной информации 0,98
-
Точность определения информации не более 300-200м и 0,25-02°
Принцип работы:
Запросчик с помощью основной антенны, вращающейся по азимуту запрашивает коды на частотах запроса. Эти запросы принимаются ненаправленными антеннами(Ответчиками). В приёмоответчике ВС формируется ответ на запрос, который излучается этими же антеннами в воздушном пространстве на частоте ответа. Ответная информация содержится в кодированном виде и принимается основной и антенной подавления. После преобразований информация подаётся в групповую аппаратуру КДП. После расшифровки в соответствии с режимом выдаётся инф:
А) Отметка РЛ и сведения о номере сквока рейса(4 цифры)
С) В этом режиме передаются сведения о барометрической высоте
S) Адресная информация отдельному ВС содержащая всю вышеперечисленную инф.
D) Комбо режим
Существует два запросных кода для ВРЛ работающего в режиме УВД
При запросе кода БН ответчика на индикаторе диспетчера высвечивается номер борта
При запросе ТИ ответчик отвечает текущую высоту в метрах(Границы от 300-400 до 30000м), сведения о запасе топлива, Признак высоты либо Авария.
Система ВРЛ имеет основной недостаток- вредное влияние боковых и задних лепестков диаграммы направленности(20% мощности), поэтому устанавливается защита от влияния боковых лепестков по каналу запрос-ответ.
Существующая система ВРЛ является неселективной. В результате Запрос -Ответа образуется очередь ответов и диспетчер вынужден выбирать то ВС, которое ему нужно.
Для УВД используется автономный ВРЛ и ВРЛ встроенные в ПРЛ
Диаграммы направленности в вертикальной плоскости совмещаются для ВРЛ встроенного в ПРЛ.
ОВРЛ:
-
Аврора МВРЛ (моноимпульсный ВРЛ)
-
АЗН «Аврора-2»
-
Аврора-S
-
Радуга
-
Корень АС, Корень С, Корень СК.( являются основными вторичными локаторами в АС УВД России)
-
Крона
Встроенные ВРЛ
-
Лира В
-
Лира ВА(обзорный радиолокационный комплекс)