

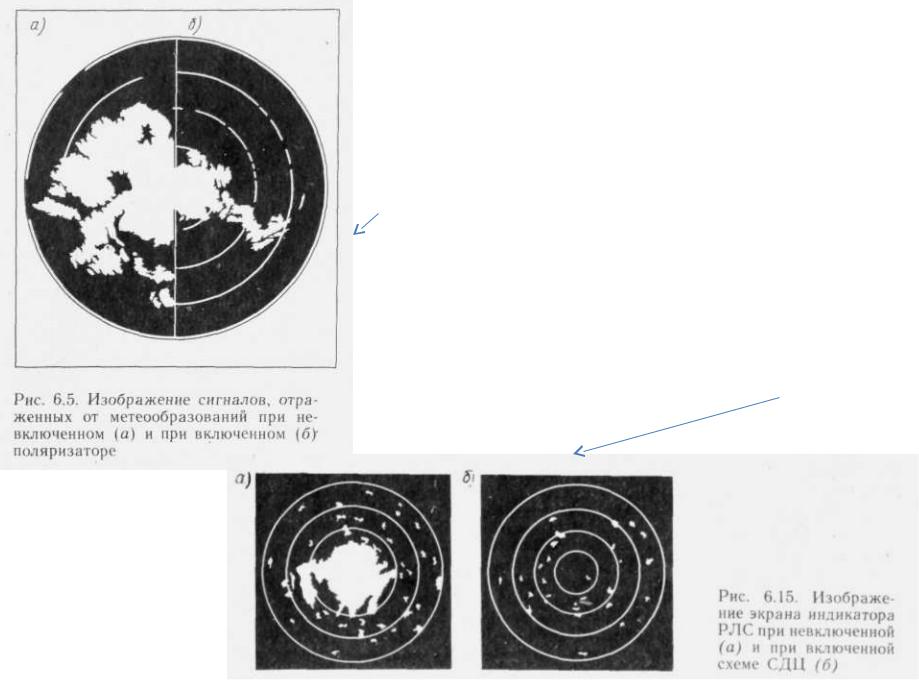
Особенности построения трассовых РЛС
•применение цифровой системы СДЦ (коэффициент подавления помех от местных предметов до 40…45 дБ
икоэффициент подпомеховой видимости до 28…32 дБ);
•применение переменного периода повторения зондирующего сигнала (вобуляция частоты) для борьбы с помехами от целей, удалённых от РЛС на расстояние, превышающее максимальную дальность действия РЛС,
идля борьбы со «слепыми» скоростями;
•применение автоматического управления положением нижней кромки зоны обзора РЛС в вертикальной плоскости благодаря использованию двухлучевой ДНА и формированию взвешенной суммы сигналов верхнего и нижнего лучей.
Защита РЛС от |
|
помех: |
|
Создаваемых |
|
метеорологическ |
|
ими |
|
образованиями |
|
(селекция |
Создаваемых |
сигналов по их |
|
поляризационны |
отражениями от |
м |
Земли и местных |
характеристика |
предметов |
м) |
(селекция |
|
движущихся |
|
целей) |
Авиационные правила. Часть 170. Сертификация оборудования аэродромов и воздушных трасс. (АП-170). Том II. Сертификационные требования к оборудованию аэродромов и воздушных трасс
1.2.1.1.ОРЛ-Т должен обеспечивать обнаружение и определение координат местоположения ВС.
1.2.1.2.Радиолокатор должен работать в дециметровом диапазоне волн (23 см или 10 см).
1.2.1.3.Зона действия ОРЛ-Т при нулевых углах закрытия, вероятности обнаружения не хуже 0,8 для ВС с эффективной отражающей поверхностью 15 м2 и вероятности ложных тревог по собственным шумам приемника 10-6 определяется следующими параметрами:
- угол обзора в горизонтальной плоскости - 360°;
- минимальный угол места |
- не более 0,5°; |
- максимальный угол места - не менее 20°; |
|
- минимальная дальность |
- не более 5,0 км; |
- максимальная дальность |
- не менее 350 км; |
- максимальная высота |
- 20000 м. |
1.2.1.4.Рекомендация. Максимальный угол места должен быть не менее 40 .
1.2.1.5.Период обновления радиолокационной информации должен быть не более 20 с или не более 10 с.
1.2.1.6.Среднеквалратическая ошибка (СКО) должна быть не более 1000 м (300 м на выходе АПОИ) по дальности и 1° (0,25° на выходе АПОИ) по азимуту.
1.2.1.7.Разрешающая способность должна быть не хуже 1000 м по дальности и 1,5° по азимуту.
1.2.1.8.Количество ложных тревог за обзор от всех видов непреднамеренных помех нс должно превышать
20.
1.2.1.9.Система автоматического контроля ОРЛ-Т должна передавать в пункт управления информацию о
его техническом состоянии.
1.2.1.10.Аппаратура управления должна обеспечивать дистанционное и местное управление работой ОРЛ-
Т.
1.2.1.11.При наличии в составе ОРЛ-Т вычислительной техники должна быть обеспечена защита
программного обеспечения и оперативной информации от несанкционированного доступа.
1.2.1.12. Плотность потока мощности СВЧ излучений у шкафов ОРЛ-Т не должна превышать 25 мкВт/см2. 1.2.1.13. Рекомендация. В ОРЛ-Т должна быть предусмотрена возможность установки устройств, обеспечивающих учет времени нахождения его в рабочем состоянии.
1.2.1.14.Вторичный канал ОРЛ-Т (при его наличии) должен соответствовать требованиям п.п. 1.3.1 - 1.3.17.
1.2.1.15.Вероятность объединения информации первичного канала и вторичного канала (при его наличии) на выходе ОРЛ-Т должна быть не менее 0,95.
-приемно-передающая аппаратура первичного канала;
-приемно-передающая аппаратураВ составвторичногоОРЛ-Т входят:канала (при наличии); -АПОИ - аппаратура первичной цифровой обработки радиолокационной информации (при сопряжении с АС УВД);
-аппаратура передачи данных по узкополосной линии связи (при сопряжении с АС УВД); -система ТУ-ТС - телеуправления, контроля и телесигнализации для
дистанционной эксплуатации ОРЛ-Т техническим составом; -комплект эксплуатационной документации.
Ввиду недостаточной яркости свечения собственных ИКО ОРЛ-Т сопрягаются с
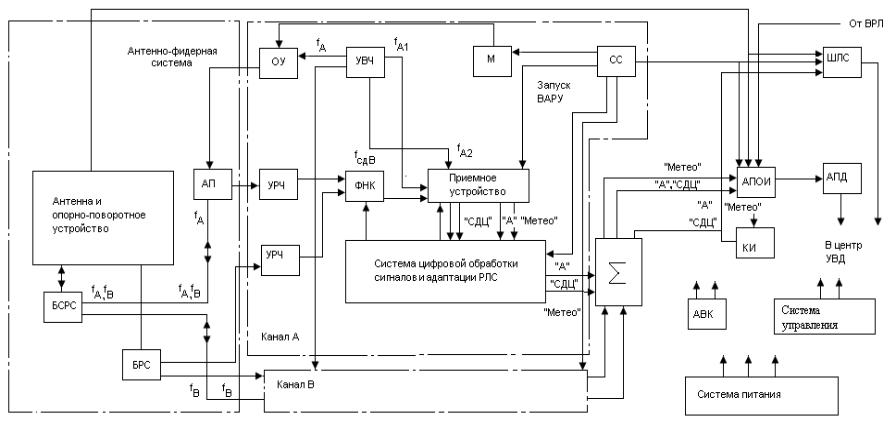
Структурная схема двухканальной трассовой РЛС.
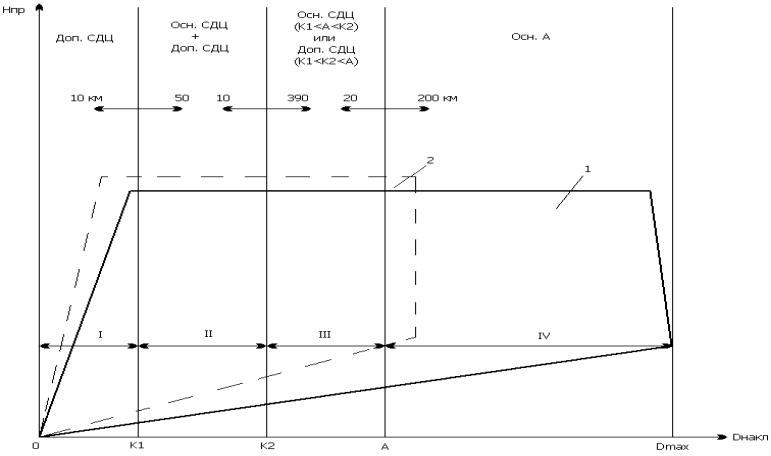
•Принцип формирования зоны обнаружения трассовой РЛС в вертикальной плоскости
K1 – верхняя граница использования сигналов дополнительного луча 2, обработанных в системе СДЦ (Доп. СДЦ); K2 – верхняя граница использования сигналов основного луча 1, обработанных с системе СДЦ (Осн. СДЦ); A – верхняя граница использования сигналов дополнительного луча 2, не обработанных в системе СДЦ (Доп. А); Dmax – максимальная дальность действия РЛС, являющаяся
верхней границей использования необработанных в системе СДЦ сигналов
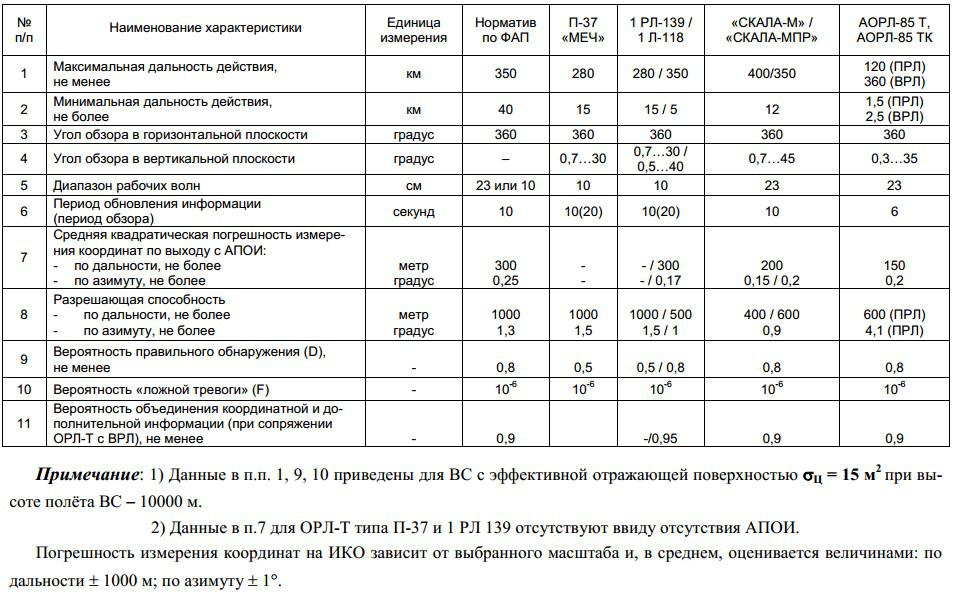
Основные эксплуатационно-технические характеристики ОРЛ-Т и требования к ним.
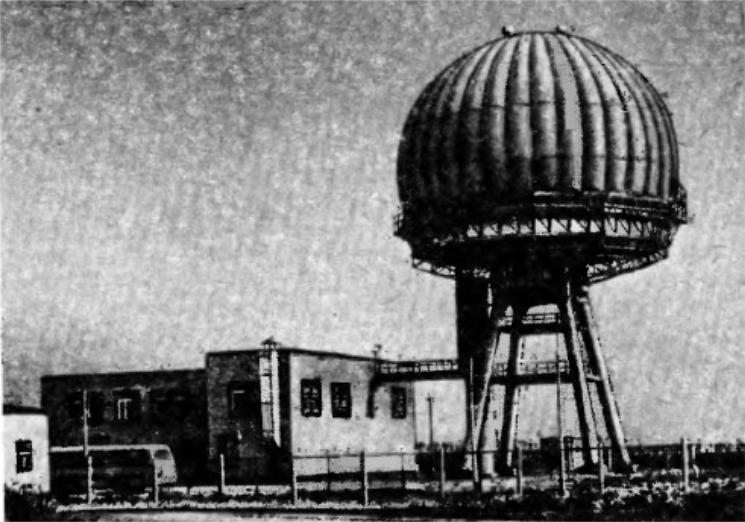
СКАЛА-М
•ОРЛ-Т вариант А
•Радиолокационный комплекс «Скала-М» предназначен для контроля и управления воздушным движением на трассах и в
зонах подхода крупных аэроузлов.
• Он может использоваться неавтоматизированных системах радиолокационной информации центров УВД и пунктов подхода.
в автоматизированных и УВД в качестве источника для диспетчеров районных
• В состав РЛК «Скала-М» входит ПРЛ, встроенный в него вторичный канал «Корень-С», аппаратура первичной обработки информации (АПОИ), аппаратура передачи данных (АПД) и автоматический радиопеленгатор АРП-АС или АРП-75.
•Дальность действия ПРЛ и ВРЛ при нулевых углах закрытия
ивероятности правильного обнаружения по первичному каналу 0,8 и по вторичному каналу 0,9 на высотах 10000, 6000
и1200 м соответственно равна 340, 250 и 120 км. Зона обзора
в вертикальной плоскости лежит в пределах 0,5 ... 45°. Темп обновления и выдачи информации 10 или 20 с.