

Шпоры 2010_Величко / шпора / шпора
.docxФизика как наука о наиболее общих св-вах и формах движения материи. Физика есть наука о наиболее общих свойствах и формах движения материи. Четкое философское определение материи было дано Лениным: «Материя есть философская категория для обозначения объективной реальности, которая дана человеку в ощущениях его, которое копируется, фотографируется, отображается нашими ощущениями, существует независимо от нас» Известны два вида материи: 1)вещество,2)поле. Материя находится в непрерывном движении, под которым понимается всякое измерение вообще (не только механическое перемещение – химические реакции тоже движение)
Классическая механика и граница её применения. В отличие от кинематики динамика изучает движение тел в связи с причинами, которые вызывают или изменяют это движение. В основе классической механики лежат три закона динамики (Законы Ньютона). Ньютоновская механика достигла огромных успехов за столетия своего развития. Появились опытные данные, которые укладывались в рамки полученных данных. Поэтому Паре разработал релятивистскую механику или механику больших скоростей. Новая механика или СТО, которую в доступном виде оформил Эйнштейн, позволила установить, что Ньютоновская механика справедлива только для скоростей, меньших по сравнению со скоростью света. В этом случае уравнения релятивистской механики переходят в уравнения механики Ньютона. Примерно в те же годы (1905) ряд ученых, На основе гипотезы Планка разработали квантовую механику, которая позволила описать явления в микромире. Уравнения квантовой механики для масс больших по сравнению с массой атома, также переходят в уравнение классической механики, подтверждая законы Ньютона.
Динамика материальной точки. Первый закон Ньютона. Инерциальные системы отсчета. Первый закон Ньютона формулируется: Всякое тело находится в состоянии покоя или равномерного прямолинейного движения, пока воздействие со стороны других тел, не заставит его изменить это состояние. Как состояние покоя, так и состояние равномерного и прямолинейного движения характеризуется нулевым ускорением. Поэтому 1й закон Ньютона можно сформулировать так: Скорость любого тела остается постоянной, в частности равной нулю, пока воздействие на это тело со стороны других тел не вызовет её изменения. Система координат в которой выполняется 1й закон Ньютона называется инерциальной. Инерциальных систем отсчета сущ. Бесконечное множество. Любая система, которая движется относительно некоторой инерциальной системы, также является инерциальной.
Ускорение
материальной точки.
Ускорение, производная скорости по
времени – величина, показывающая,
насколько изменяется вектор скорости
точки(тела) при ее движении за еденицу
времени, т.е. ускорение учитывает не
только изменение величины скорости,
но и ее направления. Вектор ускорения
мат. Точки:
 .
Величина
а
называется
ускорением, в декартовой системе
координат вектор
.
Величина
а
называется
ускорением, в декартовой системе
координат вектор
 .Если
система координат неподвижна, то орты
это векторные константы, которые можно
выносить за знак производной по времени.
Для неподвижной системы координат:
.Если
система координат неподвижна, то орты
это векторные константы, которые можно
выносить за знак производной по времени.
Для неподвижной системы координат:
 ,
,
 ,
,
 .
Представим
теперь ускорение в следующем виде:
.
Представим
теперь ускорение в следующем виде:
 .
Из
полученного следует, что вектор а
можно представить в виде суммы
тангенсального ускорения и нормального
ускорения.
.
Из
полученного следует, что вектор а
можно представить в виде суммы
тангенсального ускорения и нормального
ускорения.
Понятие массы. Воздействие на данное тело со стороны других тел вызывает изменение её скорости, т.е. сообщает данному телу ускорение. Опыт показывает, что одинаковое воздействие сообщает разным телам разные ускорения. Это означает, что разные тела по-разному противятся попыткам изменить их первоначальное состояние движения. Данное св-во тел называется инертность, а в качестве количественной характеристики используется величина – масса тела. Что бы определить массу некоторого тела нужно сравнить ее с массой эталона либо с массой тела, которая нам уже известна.
Закон сохранения момента импульса. В основе закона сохр-я момента ипульса лежит изотропия пространства по всем направлениям. Изотропия означает, что поворот замкнутой системы как целого не меняет её механических свойств.
Второй
Закон Ньютона.
2й закон Ньютона гласит что скорость
изменения импульса тела равна
воздействующей на него силе:
 *.
С точки зрения
законов сохранения это уравнение
называется законом сохранения импульса
тела на которое действует сила. Масса
тела предполагается постоянной,
уравнение *можно
записать ma=F
и по второй
формулировке Закон Ньютона гласит –
Произведение массы тела на его ускорение
равно действующей на тело силе. Эта
формулировка более узкая. Рекомендовано
в последнее уравнение записывать
*.
С точки зрения
законов сохранения это уравнение
называется законом сохранения импульса
тела на которое действует сила. Масса
тела предполагается постоянной,
уравнение *можно
записать ma=F
и по второй
формулировке Закон Ньютона гласит –
Произведение массы тела на его ускорение
равно действующей на тело силе. Эта
формулировка более узкая. Рекомендовано
в последнее уравнение записывать
 –уравнение движения
тела.
–уравнение движения
тела.
 Подчеркнем, что
2й закон ньютона является экспериментальным
в частном случае, когда F=0
из 2го закона Ньютона следует, что
ускорение тоже =0.Это означает, что
первый закон Ньютона-частный случай
Второго.
Подчеркнем, что
2й закон ньютона является экспериментальным
в частном случае, когда F=0
из 2го закона Ньютона следует, что
ускорение тоже =0.Это означает, что
первый закон Ньютона-частный случай
Второго.
Виды
взаимодействий. Третий закон Ньютона.
В современной физике различают 4 вида
взаимодействий: 1)-Гравитационное,
2)Электромагнитное,3)-Сильная или ядерная
(которая обеспечивает связь частиц в
атоме ядра),4)-Слабая(которая ответственна
за многие процессы распада элементарных
частиц.). Всякое действие тел друг на
друга носит характер взаимодействия.
Если 1 тело действует на 2 тело с силой
 ,то
и тело 2 действует на тело 1 с силой
,то
и тело 2 действует на тело 1 с силой
 .
Третий закон Ньютона утверждает, что
сила с которой тела действуют друг на
друга равна по величине и противоположна
по направлению. Третий закон Н выполняется
не всегда! Он выполняется вполне строго
в случае контакта, взаимодействия, а
также при взаимодействии тел, которые
неподвижны. Если массы покоятся, 3й
закон Ньютона строго выполняется, как
это следует из закона всемирного
тяготения.
.
Третий закон Ньютона утверждает, что
сила с которой тела действуют друг на
друга равна по величине и противоположна
по направлению. Третий закон Н выполняется
не всегда! Он выполняется вполне строго
в случае контакта, взаимодействия, а
также при взаимодействии тел, которые
неподвижны. Если массы покоятся, 3й
закон Ньютона строго выполняется, как
это следует из закона всемирного
тяготения.
Закон
всемирного тяготения. Сила тяжести.
Все
тела в природе взаимопритягивают другие
тела. Закон, которому подчиняется это
притяжение был установлен Ньютоном.Согласно
этому закону, силы с которыми 2 мат.
точки притягивают друг друга
пропорциональны массам этих точек и
обратно пропорциональны квадрату
расстояния между ними.
 .Гравитационное
взаимодействие осуществляется через
гравитационное поле. Всякое материальное
тело изменяет св-ва окружности его
пространства, создаёт в нём гравитационное
поле. Об интенсивности поля можно судить
по величине силы,действующей в данной
точке поля на тело с массой =1.Величину
.Гравитационное
взаимодействие осуществляется через
гравитационное поле. Всякое материальное
тело изменяет св-ва окружности его
пространства, создаёт в нём гравитационное
поле. Об интенсивности поля можно судить
по величине силы,действующей в данной
точке поля на тело с массой =1.Величину
 называют
напряжонностью гравитационного поля
в данной точке пространства. Напряженность
грав. поля зависит только от массы тела,
создающего это поле и не зависит от
массы m*.
Сила
вычисляется: поместить
в данную точку поля тело массой m’,
тогда сила действующая на это тело
равна:
называют
напряжонностью гравитационного поля
в данной точке пространства. Напряженность
грав. поля зависит только от массы тела,
создающего это поле и не зависит от
массы m*.
Сила
вычисляется: поместить
в данную точку поля тело массой m’,
тогда сила действующая на это тело
равна:
Закон
сохранения импульса.
Закон сохранения импульса утверждает,
что сумма импульсов всех тел замкнутой
системы есть величина постоянная. Из
законов Ньютона можно показать, что
при движении в пустом пространстве
импульс сохраняется во времени, а при
наличии взаимодействия скорость его
изменения определяется суммой приложенных
сил. В классической механике закон
сохранения импульса обычно выводится
как следствие законов Ньютона. Однако
этот закон сохранения верен и в случаях,
когда ньютоновская механика неприемлима.
Перепишем выражение определения силы
( )
для системы из N
частиц:
)
для системы из N
частиц:
 m
m .
Согласно
3у закону Ньютона, силы вида
.
Согласно
3у закону Ньютона, силы вида
 и
и
 будут
равны по абсолютному значению и
противоположны по направлению, т.е.
будут
равны по абсолютному значению и
противоположны по направлению, т.е.
 .
Исходя
из этого получим:
.
Исходя
из этого получим:
 , а если производная от некоторого
выраж. =0, то выраж есть величина постоянна,
значит
, а если производная от некоторого
выраж. =0, то выраж есть величина постоянна,
значит
 .
Сформулированное
утверждение справедливо лишь для
замкнутой системы. Сумма импульсов
частиц образующих система, называ
импульсом системы частиц:
.
Сформулированное
утверждение справедливо лишь для
замкнутой системы. Сумма импульсов
частиц образующих система, называ
импульсом системы частиц:
 . Из этого следует, что импульс аддитивная
величина, для которой справедлив закон
сохранения в широком смысле.
. Из этого следует, что импульс аддитивная
величина, для которой справедлив закон
сохранения в широком смысле.

Закон
Гука для деформации сдвига.
Рассмотрим деформацию сдвига, которая
возникает в результате тангенсальных
напряжений
 .
Определим относительный сдвиг (гама)
.
Определим относительный сдвиг (гама)
 выражения :
выражения :
 Опыт
показывает, что и в этом случае выполняется
закон Гука, который записывается
Опыт
показывает, что и в этом случае выполняется
закон Гука, который записывается
 ,
где G
– модуль сдвига.
,
где G
– модуль сдвига.
Принцип
относительности Галилея. Преобразования
Галилея.
Рассмотрим 3 инерциальные системы
движущиеся друг относительно друга с
постоянной скоростью
 .
Одну из этих систем будем считать
неподвижной (с координатами x,y,z), а
вторую будем считать движущейся (с
коорд. x’,y’,z’)
относительно первой со скоростью
.
Одну из этих систем будем считать
неподвижной (с координатами x,y,z), а
вторую будем считать движущейся (с
коорд. x’,y’,z’)
относительно первой со скоростью
 .
Определим скорости мат. точки в обеих
системах: -в неподвижной:
.
Определим скорости мат. точки в обеих
системах: -в неподвижной:
 .
–в подвижной
.
–в подвижной
 ,
где t’-время
отсчитываемое во 2й системе. В Ньютоновской
мех. предполагается, что время в обеих
системах координат течет одинаково.
Т.е. t’=t+α,
где α=const.
Тогда скорость мы можем записать
,
где t’-время
отсчитываемое во 2й системе. В Ньютоновской
мех. предполагается, что время в обеих
системах координат течет одинаково.
Т.е. t’=t+α,
где α=const.
Тогда скорость мы можем записать
 *. Докажем, что любая система координат
движущаяся относительно некоторой
инерциальной системы с постоянной
скоростью также инерциальна. Для этого
продеференцируем уравнение * по t.
*. Докажем, что любая система координат
движущаяся относительно некоторой
инерциальной системы с постоянной
скоростью также инерциальна. Для этого
продеференцируем уравнение * по t.
 .
.
 ,
тогда
,
тогда
 .
Если а=а’ или равны 0 при отсутствии
сил, то и в другой системе отсчета
ускорение будет 0, т.е. система отсчета
будет инерциальна. Тогда из второго
закона Ньютона следует, что силы
действующие на тело в обеих инерциальных
системах отсчета являются одинаковыми
.
Если а=а’ или равны 0 при отсутствии
сил, то и в другой системе отсчета
ускорение будет 0, т.е. система отсчета
будет инерциальна. Тогда из второго
закона Ньютона следует, что силы
действующие на тело в обеих инерциальных
системах отсчета являются одинаковыми
 .
Значит уравнения динамики не меняются
при переходе от одной инерц. системы к
другой. Таким образом: Принцип
относительности Галилея – фундаментальный
физический прицнип, согласно которому
все физ процессы в инерц системах
отсчета протекают одинаково, независимо
от того неподвижна ли система или она
находится в состоянии равномерного и
прямолинейного движения.
.
Значит уравнения динамики не меняются
при переходе от одной инерц. системы к
другой. Таким образом: Принцип
относительности Галилея – фундаментальный
физический прицнип, согласно которому
все физ процессы в инерц системах
отсчета протекают одинаково, независимо
от того неподвижна ли система или она
находится в состоянии равномерного и
прямолинейного движения.
Упругие
силы. Закон Гука для деформации сжатия
или растяжения. Силы трения.
Любое тело под действием приложенных
к нему сил деформируется, т.е. изменяет
свои размеры и формы. Если после
прекращения дейтсвия сил, тело принимает
первоначальные резмеры и форму-деформация
упругая. Упругие деформации наблюдаются
в том случае, если сила обуславливающая
деформацию не превосходит некоторый
вполне определенный предел для данного
тела, который назыв пределом упругости.
Возьмем пружину и приложим к её концам
равные по величине и противоположно-направленные
силы F1
и F2.
Под действием этих сил пружина растянется
на
 ,
после чего наступит равновесие.Это
означает, что внешние силы F1
и F2
уравновешиваются упругими силами,
возникающими в пружине в результате
ее деформации. Утверждение о
пропорциональности между упругой силой
и деформацией носит название закон
Гука. Закон Гука в случае действия
нормальных напряжений :
,
после чего наступит равновесие.Это
означает, что внешние силы F1
и F2
уравновешиваются упругими силами,
возникающими в пружине в результате
ее деформации. Утверждение о
пропорциональности между упругой силой
и деформацией носит название закон
Гука. Закон Гука в случае действия
нормальных напряжений :
 .Для
хар-ки упругих св-в предмета используется
.Для
хар-ки упругих св-в предмета используется
 .Используя
модуль юнга получаем
.Используя
модуль юнга получаем
 .
Силы
трения
проявляются при перемещении тех или
иных частей дург относ друга. Трение,
возникающее при относительном перемещении
соприкасающихся тел называется внешним.
А трение между частями одного и тогоже
тела – внутренними. Если между телами
отсутсвует жидкая или газообразная
прослойка, то такое трение называется
сухим. В противоположном случае –
«жидким». В случае сухого трения, сила
трения возникает не только при
относительном движении тел, но и при
попытке вызвать перемещение тел – в
последнем случае, она назыв силой
трения-покоя.
.
Силы
трения
проявляются при перемещении тех или
иных частей дург относ друга. Трение,
возникающее при относительном перемещении
соприкасающихся тел называется внешним.
А трение между частями одного и тогоже
тела – внутренними. Если между телами
отсутсвует жидкая или газообразная
прослойка, то такое трение называется
сухим. В противоположном случае –
«жидким». В случае сухого трения, сила
трения возникает не только при
относительном движении тел, но и при
попытке вызвать перемещение тел – в
последнем случае, она назыв силой
трения-покоя.
Общая характеристика законов сохранения. Для замкнутой системы остаются неизменные 3 адитивные физические величины, и в соответсвии с этим имеют место 3 закона сохранения: закон сохранения импульса, закон сохранения момента импульса и закон сохранения энергии. Законы сохранения обладают гораздо большой общностью, чем законы Ньютона и выполняются даже тогда, когда законы Ньютона, в частности 3й – нарушаются. Очень часто проводить исследование поведения механических систем гораздо удобнее с помощью законов сохранения, а не законов Ньютона. В частности используя законы сохранения можно исследовать поведение механической системы в тех случаях, когда значение сил неизвестно.
Момент
инерции.
Из определения
 следует что, момент инерции – величина
аддитивная. Момент инерции существует
без относительного вращения тела.
Поэтому любое покоящееся тело обладает
определенным моементом инерции
относительно выбранной оси, подобно
как покоящееся тело обладает массой.
Распределение массы в пределах вещества,
можно охарактеризовать с помощью
плотности вещества.
следует что, момент инерции – величина
аддитивная. Момент инерции существует
без относительного вращения тела.
Поэтому любое покоящееся тело обладает
определенным моементом инерции
относительно выбранной оси, подобно
как покоящееся тело обладает массой.
Распределение массы в пределах вещества,
можно охарактеризовать с помощью
плотности вещества.
 При описании распределения масс с
помощью плотности вещества, момент
инерции будет:
При описании распределения масс с
помощью плотности вещества, момент
инерции будет:
 .
Вычисление момента инерции с помощью
записанной ф-лы существенно упрощается,
когда рассматриваемая ось является
осью симметрии. В ином случае используют
Т.
Штейна.
Т: Момент инерции I
относительно проивзольной оси равен
моменту инерции
.
Вычисление момента инерции с помощью
записанной ф-лы существенно упрощается,
когда рассматриваемая ось является
осью симметрии. В ином случае используют
Т.
Штейна.
Т: Момент инерции I
относительно проивзольной оси равен
моменту инерции
 ,
относительно оси параллельной данной
и проходящей через центр масс тела
суммированного с проивзедением массы
тела на квадрат расстояния между этими
осями.
,
относительно оси параллельной данной
и проходящей через центр масс тела
суммированного с проивзедением массы
тела на квадрат расстояния между этими
осями.
Силовое
поле. Потенциальная энергия частицы в
поле. Консервативные силы.
Если частица в каждой точке прос-ва
подвержена воздействию других тел, то
говорят, что эта частица находится в
поле или в силовом поле. Если во всех
точках поля, силы действующие на частицу
одинаковы по величине и направлению,
т.е.
 то поле называется однородным. Поле
изменяющееся во времени назыв не
стационарным, а поле постоянное во
времени – стационарным. Зачастую для
стационарного поля, работа совершаемая
над частицой силами поля зависит только
от нач и конеч положений частицы и
независит от пути, по которому перемещалась
частица. Силы, обладающие такими св-вами
назыв консервативными. Из независимости
работы консерват сил от пути следует:
что работа таких сил на замкнутом пути
равна нулю. Консерват силы можно
определить: 1)Как силы, работа к-рых не
зависит от пути (в широком смысле), по
ко-му частица переходит из 1 положения
в 2е. 2)Как силы,работа к-рых на любом
замкнутом пути=0 .В том случае когда
работа сил поля независит от пути, а
зависит от нач. и конеч. положения
системы или частицы в каждой точке
поля, можно сопоставить значение
некоторой ф-ции U=U(x,y,z),
к-рую определим след. уравнениями:
то поле называется однородным. Поле
изменяющееся во времени назыв не
стационарным, а поле постоянное во
времени – стационарным. Зачастую для
стационарного поля, работа совершаемая
над частицой силами поля зависит только
от нач и конеч положений частицы и
независит от пути, по которому перемещалась
частица. Силы, обладающие такими св-вами
назыв консервативными. Из независимости
работы консерват сил от пути следует:
что работа таких сил на замкнутом пути
равна нулю. Консерват силы можно
определить: 1)Как силы, работа к-рых не
зависит от пути (в широком смысле), по
ко-му частица переходит из 1 положения
в 2е. 2)Как силы,работа к-рых на любом
замкнутом пути=0 .В том случае когда
работа сил поля независит от пути, а
зависит от нач. и конеч. положения
системы или частицы в каждой точке
поля, можно сопоставить значение
некоторой ф-ции U=U(x,y,z),
к-рую определим след. уравнениями:
 ,
u1
и u2-значения
ф-ции U,
А-работа сил поля по перемещению частицы
из полож 1 в полож 2. Очевидно, что ф-ция
U
имеет размерность работы или энергии.
Таким образом, ф-ция U
входит в слагаемое в интеграл движения
(E=T+U),
который имеет размерность энергии.
Поэтому ф-цию U
назыв потенциальной энергией частицы,
полем внешних консервативных сил.
,
u1
и u2-значения
ф-ции U,
А-работа сил поля по перемещению частицы
из полож 1 в полож 2. Очевидно, что ф-ция
U
имеет размерность работы или энергии.
Таким образом, ф-ция U
входит в слагаемое в интеграл движения
(E=T+U),
который имеет размерность энергии.
Поэтому ф-цию U
назыв потенциальной энергией частицы,
полем внешних консервативных сил.
Связь
между потенциальной энергией и
консервативной силой. Работа совершаемая
консервативной силой.
В том случае когда работа сил поля
независит от пути, а зависит от нач. и
конеч. положения системы или частицы
в каждой точке поля, можно сопоставить
значение некоторой ф-ции U=U(x,y,z),
к-рую определим след. уравнениями:
 ,
u1
и u2-значения
ф-ции U,
А-работа сил поля по перемещению частицы
из полож 1 в полож 2. Очевидно, что ф-ция
U
имеет размерность работы или энергии.
Таким образом, ф-ция U
входит в слагаемое в интеграл движения
(E=T+U),
который имеет размерность энергии.
Поэтому ф-цию U
назыв потенциальной энергией частицы,
полем внешних консервативных сил.
,
u1
и u2-значения
ф-ции U,
А-работа сил поля по перемещению частицы
из полож 1 в полож 2. Очевидно, что ф-ция
U
имеет размерность работы или энергии.
Таким образом, ф-ция U
входит в слагаемое в интеграл движения
(E=T+U),
который имеет размерность энергии.
Поэтому ф-цию U
назыв потенциальной энергией частицы,
полем внешних консервативных сил.
Полная
механическая энергия. Закон сохранения
полной механической энергии.
Из соотношения
 следует адитивность полн мех энерегии
для системы неззаимодействующих частиц,
кроме того мы доказали, что полная механ
энергия системы невзаимодейств частиц,
на которую действуют только консерват
силы остается постоянной. Это утверждение
выражает закон сохранения энергии для
рассматриваемой механ системы. Если
частица взаимодействует между собой,
причем силы взаимодействия консервативны,
то полную механ энергию можно представить:
следует адитивность полн мех энерегии
для системы неззаимодействующих частиц,
кроме того мы доказали, что полная механ
энергия системы невзаимодейств частиц,
на которую действуют только консерват
силы остается постоянной. Это утверждение
выражает закон сохранения энергии для
рассматриваемой механ системы. Если
частица взаимодействует между собой,
причем силы взаимодействия консервативны,
то полную механ энергию можно представить:
 , где
, где
 -потенц
энегрия взаимодействия частицы сист,
а
-потенц
энегрия взаимодействия частицы сист,
а
 -потенц
энергия частиц системы в поле внешних
консерват сил. Для замкнутой системы
(на к-рую не действуют внешние силы):
-потенц
энергия частиц системы в поле внешних
консерват сил. Для замкнутой системы
(на к-рую не действуют внешние силы):
 Полная механическая энергия замкнутой
системы тел, на которые действуют
внутренние консервативные силы, остается
постоянной.
Полная механическая энергия замкнутой
системы тел, на которые действуют
внутренние консервативные силы, остается
постоянной.
Поступательное
движение твердого тела. Аналогии между
формулами вращательного и поступательного
движений.
При поступательном движ все точки тела
получают за промежуток времени одинаковое
перемещение. Поэтому достаточно
определить движение одной из точек
тел, например центра масс, что бы
охарактеризовать всё движение в целом.
При вращательном движении все точки
движутся по окружности, центры которых
лежат на одной и той же прямой, назыв
осью вращения. Аналогии –
1)Поступательное-2)Вращательное: 1-1)Закон
сохранения импульса:
 1-2)Закон сохранения момента импульса
1-2)Закон сохранения момента импульса
 . 2-1) 2й Закон Ньютона:
. 2-1) 2й Закон Ньютона:
 2-2)Основное уравн динамики
вращ движ I
2-2)Основное уравн динамики
вращ движ I .3-1)Кинетическая энерг:
.3-1)Кинетическая энерг:
 .
3-2)Вращ движение:
.
3-2)Вращ движение:
 .
4)-Выражение для элементарной работы :
1)
.
4)-Выражение для элементарной работы :
1)
 2)
2)

Центр
масс. Уравнение движения центра масс.
Разбив абсолютно твердое тело на
элементарные массы
 ,
его можно представить в силу малости
размеров обьемов
,
его можно представить в силу малости
размеров обьемов
 ,
как систему мат точек, взаимное
расположение к-рых неизменно. Поскольку
сумма всех внутренних сил равна нулю,
как следствие 3го закона Ньютона из
определения положения центра масс
,
как систему мат точек, взаимное
расположение к-рых неизменно. Поскольку
сумма всех внутренних сил равна нулю,
как следствие 3го закона Ньютона из
определения положения центра масс
 ,
следует что ускорение центра масс:
,
следует что ускорение центра масс:
 ,
отсюда получаем
,
отсюда получаем
 ,
где
,
где
 -вектор ускор. центра масс. В итоге
получаем:
-вектор ускор. центра масс. В итоге
получаем:
 .
.
Гироскопический
эффект при вращении твердого тела
вокруг неподвижной оси.
Гироскопом или волчком называется
массивное, симметричное тело, которое
вращается с большой скоростью вокруг
оси симметрии. Эту ось называют осью
гироскопа. Эта ось является однои из
главных осей инерции. Поэтому, если эта
ось не поворачивается в прос-ве, момент
импульса
 ,
где I
–момент инерции гироскопа, относительно
его оси, а w
– угловая скорость вращения гироскопа.
Описание гироскопического эффекта
состоит в том, что при попытке изменить
направление оси гироскопа с помощью
внешней силы, в отличие от традиционного
поступательного движения не происходит
перемещение оси гироскопа по направлению
силы, а эта ось начинает перемещаться
или прецессировать к плоскости
перпендикулярной действию силы.
,
где I
–момент инерции гироскопа, относительно
его оси, а w
– угловая скорость вращения гироскопа.
Описание гироскопического эффекта
состоит в том, что при попытке изменить
направление оси гироскопа с помощью
внешней силы, в отличие от традиционного
поступательного движения не происходит
перемещение оси гироскопа по направлению
силы, а эта ось начинает перемещаться
или прецессировать к плоскости
перпендикулярной действию силы.
Решение
уравнения затухающих колебаний.
Уравнение затухающих колебаний – это
 ,
где
,
где
 -циклическая
частота собственных колебаний,
-циклическая
частота собственных колебаний,
 .
.
 .
.
 -
коэффициент затухания. Тогда решением
этого уравнения будет:
-
коэффициент затухания. Тогда решением
этого уравнения будет:

Коэффициент
затухания. Логарифмический декримент
затухания.
Затухание колебаний можно представить
как гармоничее колебания с амплитудой
зависящей от времени по закону
 .
.
 – коэффициент затухания. А отношение
значений амплитуд для моментов времени,
отличающихся на период
– коэффициент затухания. А отношение
значений амплитуд для моментов времени,
отличающихся на период
 называют дикрементом затухания. А
называют дикрементом затухания. А
 называется логарифмическим декриментом
затухания. Логарифмический декримент
затухания обратно пропорционален числу
колебаний за время
называется логарифмическим декриментом
затухания. Логарифмический декримент
затухания обратно пропорционален числу
колебаний за время
 в течении которого амплитуда уменьшается
в L
раз.
в течении которого амплитуда уменьшается
в L
раз.
Вывод
уравнения свободных гармонических
колебаний. Уравнение гармонических
колебаний при наличии сил сопротивления.
Уравнение вынужденных колебаний.
Свободные колеб – называются такие
колебания которые происходят в системе
предоставленной самой себе. Допустим
груз подвешенный на пружине оттянули
вниз и отпустили. Вынужденными колебаниями
называются такие колебания, в процессе
которых колебательная система
подвергается воздействию внешней
периодической силы.Из приведенного
уравнения 2го закона Ньютона к стандартной
форме, используемой в теории колебаний
получим что: след-но-
след-но-
 ,
тогда обозначим
,
тогда обозначим
 , и получим уравнение свободных
гармонических колебаний:
, и получим уравнение свободных
гармонических колебаний:
 .При наличии сил сопротивления уравн
2го закона Ньютона будет иметь вид:
.При наличии сил сопротивления уравн
2го закона Ньютона будет иметь вид:
 ,
->
,
->
 ->
->
 и в итоге уравнение затухающих колебаний
будет иметь вид:
и в итоге уравнение затухающих колебаний
будет иметь вид:
 .
Если колебательная система подвергается
действию внешней силы, изменяющейся
по закону
.
Если колебательная система подвергается
действию внешней силы, изменяющейся
по закону
 ,
тогда 2й закон Ньютона будет иметь вид:
,
тогда 2й закон Ньютона будет иметь вид:
 ,
Тогда вынужденные колебания под
действием периодической вынужд силы
будут иметь вид:
,
Тогда вынужденные колебания под
действием периодической вынужд силы
будут иметь вид:

Угловая
скорость и ускорение.
Угловой
скоростью называется
векторная величина, равная первой
производной угла поворота тела по
времени:
![]() Размерность
угловой скорости dim=T-1,
a
. ее единица — радиан в секунду
(рад/с).Линейная скорость точки
Размерность
угловой скорости dim=T-1,
a
. ее единица — радиан в секунду
(рад/с).Линейная скорость точки
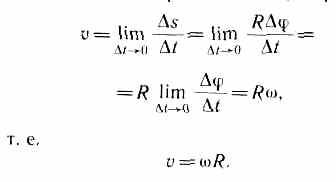 В
векторном виде
В
векторном виде
![]() Угловым
ускорением называется
векторная величина, равная первой
производной угловой скорости по
времени:
Угловым
ускорением называется
векторная величина, равная первой
производной угловой скорости по
времени:![]()

![]()
Перемещение,
скорость материальной точки, вычисление
пути.
Траектория движения
материальной точки — линия, описываемая
этой точкой в пространстве. В
зависимости от формы траектории движение
может быть прямолинейным или
криволинейным.Рассмотрим движение
материальной точки вдоль произвольной
траектории (рис.2). Отсчет времени начнем
с момента, когда точка находилась в
положении А.
Длина
участка траектории АВ,
пройденного
материальной точкой с момента начала
отсчета времени, называется длиной
пути As
и является скалярной
функцией
времени: s
= s(t).
Вектор
r=r-r0,
проведенный из начального положения
движущейся точки в положение ее в.
данный момент времени (приращение
радиуса-вектора точки за рассматриваемый
промежуток времени), называется
перемещением.При
прямолинейном движении вектор перемещения
совпадает с соответствующим участком
траектории и модуль перемещения
|r|
равен пройденному пути s.Для
характеристики движения материальной
точки вводится векторная величина —
скорость, которой определяется как
быстрота
движения,
так и его направление
в
данный момент времени.Пусть материальная
точка движется по какой-либо криволинейной
траектории так, что в момент времени t
ей
соответствует радиус-вектор r0
(рис. 3). В течение малого промежутка
времени t
точка пройдет путь As
и получит элементарное (бесконечно
малое) перемещение r.Вектором
средней скорости <v>
называется отношение приращения r
радиуса-вектора точки к промежутку
времени tНаправление
вектора средней скорости совпадает
с направлением r.
При неограниченном уменьшении t
средняя скорость стремится к предельному
значению, которое называется
мгновенной
скоростью v:
![]() Мгновенная
скорость v,
таким образом, есть векторная величина,
равная первой производной радиуса-вектора
движущейся точки по времени. Так как
секущая в пределе совпадает с касательной,
то вектор скорости v
направлен по касательной к траектории
в сторону движения . По мере уменьшения
t
путь s
все больше будет приближаться к |r|,
поэтому модуль мгновенной скорости
Мгновенная
скорость v,
таким образом, есть векторная величина,
равная первой производной радиуса-вектора
движущейся точки по времени. Так как
секущая в пределе совпадает с касательной,
то вектор скорости v
направлен по касательной к траектории
в сторону движения . По мере уменьшения
t
путь s
все больше будет приближаться к |r|,
поэтому модуль мгновенной скорости .При
неравномерном движении модуль
мгновенной скорости с течением времени
изменяется. В данном случае пользуются
скалярной величиной (v)
—средней
скоростью неравномерного
движения:
.При
неравномерном движении модуль
мгновенной скорости с течением времени
изменяется. В данном случае пользуются
скалярной величиной (v)
—средней
скоростью неравномерного
движения:
![]() Если
выражение ds
= vdt
(см.
формулу (2.2)) проинтегрировать по
времени в пределах от t
до
t+t,
то
найдем длину пути, пройденного точкой
за время t.В
случае равномерного
движения числовое
значение мгновенной скорости постоянно;
тогда выражение примет вид
Если
выражение ds
= vdt
(см.
формулу (2.2)) проинтегрировать по
времени в пределах от t
до
t+t,
то
найдем длину пути, пройденного точкой
за время t.В
случае равномерного
движения числовое
значение мгновенной скорости постоянно;
тогда выражение примет вид![]() Длина
пути, пройденного точкой за промежуток
времени от t1
до
t2,
дается
интегралом
Длина
пути, пройденного точкой за промежуток
времени от t1
до
t2,
дается
интегралом