

Министерство образования и науки Российской Федерации
ФГБОУ ВПО «Омский государственный технический университет»
Кафедра «Автоматизация и робототехника»
Домашнее задание №3
по дисциплине “Теория автоматического управления”
«Линейный анализ системы в Simulink»
Вариант 4 (блок 2)
Проверила:
___________ Тоцкая И.В.
Выполнил:
ст. гр. БМТ-419
____________ Дьяконов Д.В.
Омск 2012
Цель работы и использованные при ее выполнении технические и программные средства
Цель: Выбрать регулятор и определить его настройки с использованием средств линейного анализа пакета Simulink, построить логарифмические частотные характеристики системы. Оценить качество полученной системы. Сравнить полученные результаты с результатами синтеза системы в программе Classic.
Использованные средства: программа Matlab 2012.
Исходные данные для выполнения задания
Исследуется система автоматического регулирования расхода, состоящая из объекта регулирования, измерительного преобразователя и исполнительного механизма. Параметры и тип элементов системы приведены в таблице 1:
Табл. 1. Параметры элементов системы
|
Элемент системы |
Тип элемента |
Параметры элемента |
|
Объект регулирования |
Безынерционный |
kОБ =23,6 |
|
Измерительный преобразователь |
Инерционный |
kИП =0,192 ТИП =2,48 с |
|
Исполнительный механизм |
Колебательный |
KИМ =73 Т1 = 0,026 с Т2 = 0,044 с |
Ход выполнения задания
3.1. Функциональная схема системы
Задающий сигнал поступает на регулятор, регулятор подает сигнал на исполнительный механизм, который оказывает управляющее воздействие на объект управления. Выходной сигнал с объекта управления поступает на измерительный преобразователь, который подает корректирующий сигнал регулятору, так как в исходных данных есть измерительный преобразователь, то система замкнута. Используя структурный метод для построения математической модели, составим функциональную схему замкнутой системы. Полученная схема представлена ниже:
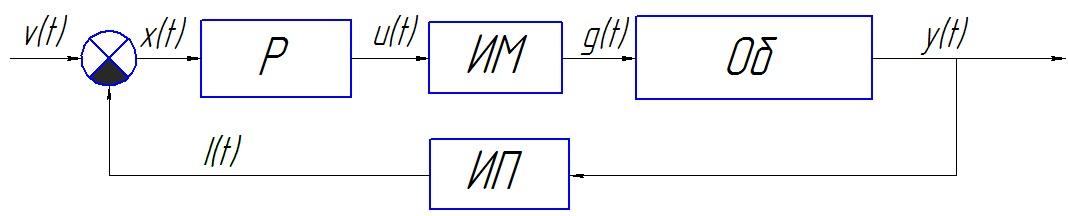
Рис. 1. Функциональная схема системы регулирования расхода
Описание функциональной схемы:
v(t)-задающий
параметр;![]()
- сравнительный элемент (вычитающий);
x(t) - входной сигнал на регулятор (Р);
u(t) - сигнал на исполнительный механизм (ИМ), представленный безынерционным звеном;
g(t) - сигнал на объект управления (Об), представленный инерционным звеном;
y(t) - выходной регулируемый сигнал на измерительный преобразователь (ИП), представленный инерционным звеном;
I(t) - сигнал с ИП на сравнительный элемент.
Описание элементов системы передаточными функциями
1.Объект управления является элементом инерционного типа (табл. 1), следовательно, переходный процесс апериодический и имеет плавный характер. Среди типовых звеньев такими свойствами обладает инерционное звено. Поэтому передаточную функцию объекта управления можно задать как передаточную функцию инерционного звена:
 ,
(1.1)
,
(1.1)
где kоб – коэффициент усиления Об, Tоб – постоянная времени Объекта.
2. Измерительный преобразователь является элементом инерционного типа (табл. 1), следовательно, переходный процесс апериодический и имеет плавный характер. Среди типовых звеньев такими свойствами обладает инерционное звено. Поэтому передаточную функцию измерительного преобразователя можно задать как передаточную функцию инерционного звена:
|
|
(1.2) |
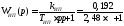
где kИП – коэффициент усиления ИП, TИП – постоянная времени ИП.
3.Исполнительный механизм системы представлен элементом безынерционного типа (см. табл.1), который предполагает ступенчатую функцию переходного процесса, повторяющую функцию входного сигнала, усиленного в k раз. Среди типовых звеньев такими свойствами обладает безынерционное звено. Поэтому передаточную функцию исполнительного механизма можно задать как передаточную функцию безынерционного звена.
 ,
(1.3)
,
(1.3)
где
 - коэффициент усиления ИМ.
- коэффициент усиления ИМ.