

3.3 Структурная схема системы автоматического регулирования уровня
На основе полученных передаточных функций объекта регулирования (1), измерительного преобразователя (2) и исполнительного механизма (3), строим структурную схему системы регулирования уровня на рисунке 2.

Рисунок 2. Исходная структурная схема системы автоматического регулирования уровня.
Преобразуем полученную систему регулирования, приведя ее к структурной схеме с единичной обратной связью. Для этого перенесем сумматор с выхода на вход обратной связи, при этом необходимо между переносимым воздействием и сумматором добавить фиктивное звено с передаточной функцией, обратной передаточной функции исходного звена:
![]() .
.
Получим структурную схему системы, изображенную на рисунке 3.

Р
Фиктивное звено не оказывает влияние на динамические свойства системы, поэтому в дальнейшем мы можем его не учитывать при проведении исследования и использовать структурную схему, приведенную на рисунке 4.

Рисунок 4. Структурная схема системы с единичной обратной связью без фиктивного звена
3.4 Анализ передаточной функции известной части системы и выбор типа регулятора
На основе структурной схемы системы регулирования уровня получим передаточную функцию известной нам управляемой части:
![]() ,
,
где
![]() –
общий коэффициент усиления управляемой
части системы.
–
общий коэффициент усиления управляемой
части системы.
Анализируя
данное выражение, можем сделать вывод,
что наиболее неблагоприятными
динамическими характеристиками обладает
исполнительный механизм, т.к. имеет
наибольшую постоянную времени ТИМ
=18,2,
подберем регулятор таким образом, чтобы
он компенсировал это влияние. Поскольку
исполнительный механизм является
инерционный звеном, то для осуществления
управления возьмем ПД-регулятор.
ПД-регулятор обладает форсирующими
свойствами. Примем постоянную времени
ПД-регулятора
![]() =18,2.
Передаточная функция ПД-регулятора
будет иметь следующий вид:
=18,2.
Передаточная функция ПД-регулятора
будет иметь следующий вид:
![]() .
.
kп – коэффициент усиления пропорционального канала ПД-регулятора,
kд – коэффициент усиления дифференциального канала ПД-регулятора,
![]() -
постоянная
времени ПД-регулятора.
-
постоянная
времени ПД-регулятора.
Таким образом, задача сводится к определению коэффициента усиления регулятора kп. Для решения данной задачи воспользуемся ЭВМ с установленной на нее программой для анализа и синтеза линейных систем автоматического управления Classic 3.01.
4. Описание работы в программе classic 3.0.1
4.1 Ввод модели
Определив тип регулятора, вводим в программу структурную схему модели, соответствующую структурной схеме, изображённой на рисунке 4.

Рисунок 4. Структурная схема системы
Первому блоку присваиваем следующие параметры: название – ИП (измерительный преобразователь); атрибут – вход; один из трёх входов делаем отрицательным,данный вход будет выполнять функцию сумматора(каждое структурное звено имеет на входе сумматор входных сигналов) и вводим передаточную функцию измерительного преобразователя.
Второй блок: название – РЕГ (регулятор); передаточная функция ПД – регулятора.
Третий блок: название – ИМ (исполнительный механизм); передаточная функция исполнительного механизма.
Четвёртый блок: название – ОБ (объект); атрибут – выход; передаточная функция объекта регулирования.
Соединяем между собой блоки. Отрицательную обратную связь образует линия, соединяющая выход четвёртого блока, с отрицательным входом первого блока.
Полученная модель системы, представленная на рис. 5., является эквивалентной структурной схеме системы автоматического регулирования уровня.
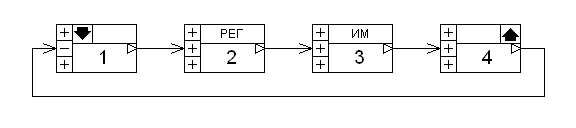
Рисунок 5. Структурная схема в программе CLASSIC.