

7.3. Определение абсолютных скоростей и ускорений точек и звеньев манипулятора
После того как принят закон изменения обобщенных координат qi(t), можно в соответствии с изложенным ранее матричным методом определить положение схвата и любого другого звена манипулятора в пространстве, т. е. определить координаты их характерных точек и ориентацию как функцию времени.
Запишем
вновь выражение (7.1):
![]()
Тогда
![]() .
.
Так
как
![]() ,
то
,
то
![]() или
или
![]()
С
формальной стороны назначение вектора
столбца
![]() заключается в выделении из матрицы 4x4
подобного ему вектора-столбца, в основе
которого будет четвертый столбец матрицы
заключается в выделении из матрицы 4x4
подобного ему вектора-столбца, в основе
которого будет четвертый столбец матрицы
![]() .
.
П оэтому
можно записать, с учетом того, что по
четвертой координате скорость равна
0, т. к.dl/dt
= 0:
оэтому
можно записать, с учетом того, что по
четвертой координате скорость равна
0, т. к.dl/dt
= 0:
(Производная от матрицы равна матрице, все элементы которой есть производные от элементов исходной матрицы).
Таким образом, для определения линейных скоростей точек манипулятора и, в частности схвата, достаточно взять производную по времени от соответствующей матрицы перехода и выделить в ней четвертый столбец.
Найдем производную матрицы перехода как производную произведения:
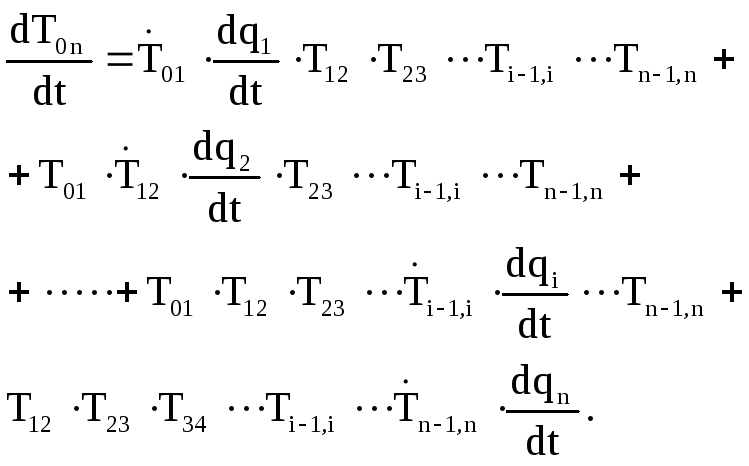 (7.6)
(7.6)
Если бы имелись аналитические выражения для каждого элемента результирующей матрицы перехода, то достаточно было бы продифференцировать по времени эти элементы и получить абсолютные скорости по каждой координате X,Y,Z. Однако обычно располагают только матрицами перехода, перемножая которые определяют координаты необходимых точек манипулятора и ориентацию его звеньев.
Если разрабатывается система управления для конкретного манипулятора, то возможно в некоторых случаях провести преобразования и перейти к конкретным аналитическим выражениям. Но это должно оцениваться в каждом конкретном случае: либо целесообразно сокращать затраты времени проектировщиков, либо машинное время при управлении роботом.
После того как определены скорости по трем координатам, можно определить полную абсолютную скорость требуемых точек звеньев манипулятора, и в частности центра схвата.
![]() .
.
Так как при исследовании кинематики манипуляторов используются специальные системы координат и перемещение i-го звена относительно (i-1)-го всегда происходит по оси Zi-1 либо вокруг нее, то расчет производных от исходных матриц перехода кинематических пар несколько упрощается: чтобы продифференцировать матрицу перехода кинематической пары, достаточно ее умножить слева на матрицу дифференцирования i-1,i:
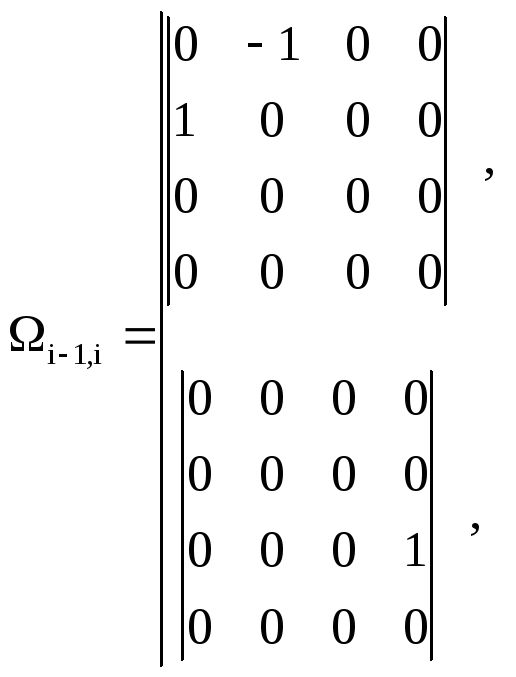
если i-я
кинематическая пара вращательная;
если i-я
кинематическая пара поступательная,
то есть
![]()
Тогда выражение (7.6 ) примет вид:

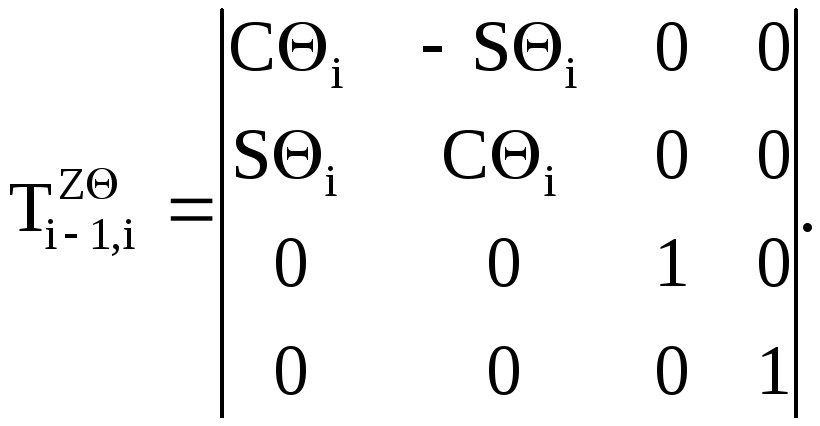
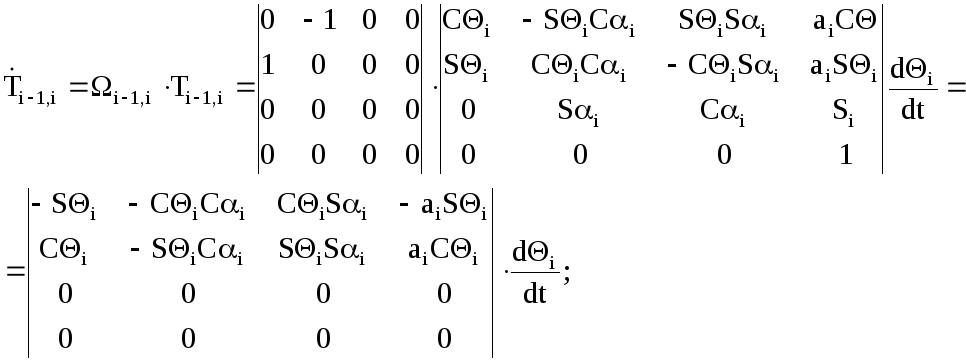
Пример: Пусть матрица перехода будет иметь вид (поворот вокруг оси Zi-1):
Тогда по правилу дифференцирования матриц
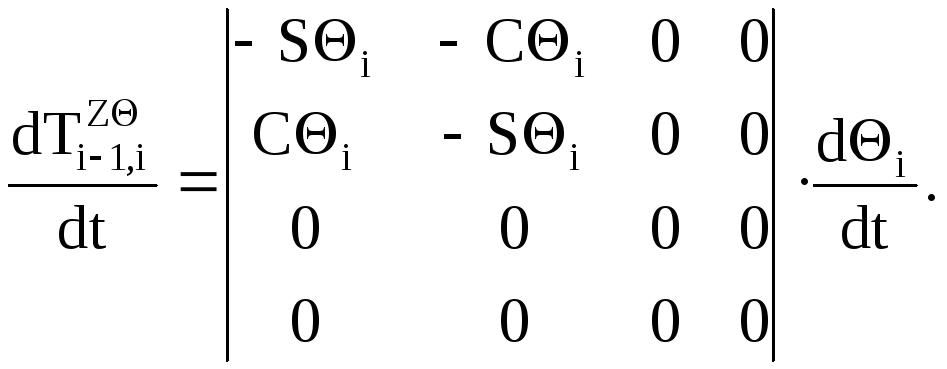
С использованием матрицы дифференцирования i-1,i:

Определим матрицу
![]() ,
равную произведению
,
равную произведению![]() ,
для вращательной и поступательной
кинематических пар:
,
для вращательной и поступательной
кинематических пар:
вращательная кинематическая пара
 :
:
поступательная кинематическая пара
 varia:
varia:

Зная аналитические выражения матриц скоростей, их можно непосредственно подставлять в выражение (7.6).
Смысл использования
оператора дифференцирования
![]() ,
состоит в сохранении матриц
,
состоит в сохранении матриц![]() ,
чтобы не переходить к другим аналитическим
выражениям при составлении программ
вычисления скоростей.
,
чтобы не переходить к другим аналитическим
выражениям при составлении программ
вычисления скоростей.