

Лекции / ЛЕКЦИЯ5_09
.pdf5 ЭЛЕКТРИЧЕСКИЕ ФИЛЬТРЫ. ЯВЛЕНИЕ ВЗАИМНОЙ ИНДУКЦИИ.
ПОСЛЕДОВАТЕЛЬНОЕ И ПАРАЛЛЕЛЬНОЕ СОЕ ИНДУКТИВНО СВЯЗАННЫХ ЭЛЕМЕНТОВ. МЕТОДЫ РАСЧЁТА ИНДУКТИВНО СВЯЗАННЫХ ЦЕПЕЙ
(Сост. Никонов А.В.)
Фильтры применяются для выделения или подавления определенных коле-
баний, разделения частотных каналов, формирования спектра сигналов. Электри-
ческим фильтром называется четырёхполюсник, пропускающий без ослабления или с малым ослаблением колебания определенных частот и пропускающий с большим ослаблением колебания других частот.
Полоса частот, в которой ослабление мало, называется полосой пропуска-
ния. Полоса частот, в которой ослабление велико, называется полосой непро-
пускания (задерживания). Между этими полосами находится переходная область.
По расположению на шкале частот полосы пропусканияразличают сле-
дующие фильтры:
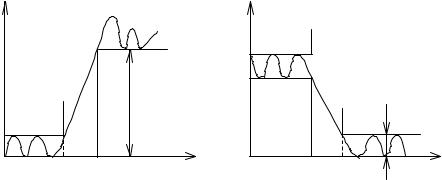
а) нижних частот (ФНЧ), в которых полоса пропускания располагается на шкале частот от ω = 0 до некоторой граничной частоты ω= ωСР, а полоса не-
пропускания (задерживания) – от частоты ω = ωСР до бесконечно больших частот
(рисунок 5.1, а);

Рисунок 5.1 – Электрические фильтры
б) верхних частот (ФВЧ) с полосой пропускания от частоты ω= ωСР до
бесконечно больших частот и полосой непропускания от частоты ω = 0 до ω =
ωСР (рисунок 5.1, б);
в) |
полосовые |
(ПФ), |
в которых полоса пропускания от ωСРН до ωСРВ |
располагается |
между полосами непропускания 0 – ωЗ1 и ωЗ2 – µ (рисунок |
||
5.1, в); |
|
|
|
д) заграждающие (фильтр-пробка, режекторные), в которых между поло-
сами пропускания 0 – ωСРН и ωСРВ – µ находится полоса непропусканияωСРН –
ωСРВ (рисунок 5.1, д);
е) многополосные, имеющие несколько полос пропускания.
На рисунке 5.1 показаны также условные графические обозначения фильтров каждого типа в соответствии с ГОСТ. В соответствии с используемой элементной

базой к настоящему моменту выделились несколько классов фильтров. Историче-
ски первыми (и все еще наиболее широко применяемыми) являются пассивные фильтры, содержащие элементы L и С. Они носят название LC-фильтров.
Во многих случаях на практике требовалась крайне высокаяизбирательность
(различие ослаблений в полосах пропускания и непропусканияв десятки тысяч раз). Это привело к появлению фильтров с механическими резонаторами: кварце-
вых, магнито-стрикционных, электромеханических.
Самые значительные достижения в области теории и проектирования фильтров связаны с успехами микроэлектроники. Требования микроминиатюризации аппа-
ратуры заставили отказаться от использования индуктивностей, которые
имеют большие габаритные размеры, особенно на низких частотах, и не поддаются исполнению в микроминиатюрном виде. Появились активные RС-фильтры, со-
стоящие из резисторов, конденсаторов и активных приборов(например, транзи-
сторов). Эти фильтры могут быть выполнены в виде микромодульной конструкции или интегральной схемы. Применение активных RС-фильтров ограничивается пока сравнительно небольшим диапазоном частот до нескольких мегагерц.
Разработка цифровых систем и достижения в области цифровых вычислитель-
ных машин стимулировали созданиефильтров на базе элементов цифровой и
вычислительной техники – цифровых фильтров.
ТРЕБОВАНИЯ К ЭЛЕКТРИЧЕСКИМ ХАРАКТЕРИС
ФИЛЬТРОВ. Избирательность фильтра (степень разграничения полос пропус-
кания и непропускания) определяется крутизной характеристики рабочего ос-
лабления. Чем больше крутизна этой характеристики и чем сильнее ослабление в полосе пропускания, тем лучше избирательность фильтра и, следовательно, меньше уровень помех от подавляемых колебаний.
Требования к электрическим характеристикам фильтров задаются в виде допустимых пределов изменения этих характеристик:
а) рабочее ослабление в полосе пропусканияне должно превышать некото-
рого максимального допустимого значенияАP MAX, а в полосе непропускания не
должно быть ниже некоторого минимально допустимого значенияАP MIN. Изо-
бражение этих требований графически показанона рисунке 5.2, а. На этом рисунке
wСР и wЗ – граничные частоты полос пропускания и непропускания.
Ap |
|
|
ô |
w ô2 |
|
|
|
|
|
|
|
Hp(j ) |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
e |
-2A p min |
|
|
|
-2A p min |
|
|
|
|
|
e |
||
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
Apmax |
|
Apmax |
|
|
|
|
|
0 |
w |
|
0 |
wср |
wз |
|
w |
w |
w |
|
|||||
ср |
з |
|
б) |
|
|
|
|
а) |
|
|
|
|
|
||
|
Рисунок 5.2 – АЧХ ФНЧ |
|
|
|
|||
б) фазочастотная характеристика фильтра (допустимые отклонения от ли-
нейного закона);
в) нелинейные искажения(обусловленные, например, наличием магнитного сердечника в катушках индуктивности).
Могут предъявляться требования и к другим характеристикам и параметрам фильтра.
Идеальные частотные характеристики фильтра заведомо нереализуем. ы
Частотные характеристики реальных фильтров могут лишь приближаться к ним с той или иной степенью точности в зависимости от сложности схемы фильтра.
Перед тем как перейти к конкретным электрическим фильтрам, необходимо сделать два замечания.
Во-первых, в теории фильтровпринято иметь дело не с обычной угловой частотой w, а с нормированной частотой Ω = w/wН,

где wН – нормирующая частота. Обычно в качестве нормирующей частоты вы-
бирают граничную частоту полосы пропусканияwСР, так что Ω = wСР /wН = wСР
/wСР = 1 .
Во-вторых, имеет смысл подробно изучать только фильтры нижних час-
тот, так как остальные типы фильтров (верхних частот, полосовые и заграждаю-
щие) могут быть легко получены из ФНЧс помощью замены переменной (часто-
ты) или, как принято говорить, с помощью преобразования частоты.
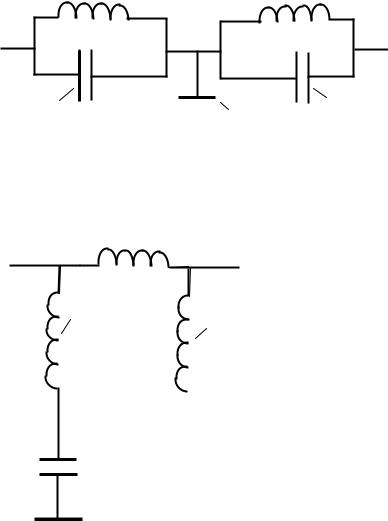
Фильтры типа k и m. Фильтром типа k называются лестничные схемы с
& |
& |
= r |
2 |
. Элементарным фильт- |
||||
взаимно-обратными сопротивлениями плеч Z |
1 Z 2 |
|
||||||
ром типа k является Г-образная схема, представленная на рисунке 5.3, а. |
||||||||
|
|
|
|
|
|
& |
& |
2 |
Сопротивления плеч этого фильтра взаимообратны: |
|
= L/C = r . Сопро- |
||||||
Z |
1 Z2 |
|||||||
тивление r = |
|
называется номинальным |
характеристическим сопро- |
|||||
L / C |
||||||||
тивлением фильтра. |
|
|
|
|
|
|
||
Рисунок 5.3 – Фильтр типа k (Г-образная схема)
Характеристика собственного ослабления А фильтра (рисунок 5.3,6) равна нулю в диапазоне
с
частот 0≤Ω≤1 и монотонно растет по закону Ас= ArchΩ при изменении частоты от 1 до ¥ . Характери-

стические сопротивления фильтра  и
и  в полосе пропускания являются активными, но изменяются с ростом частоты по законам (рисунок 5.3, в):
в полосе пропускания являются активными, но изменяются с ростом частоты по законам (рисунок 5.3, в):
и |
. |
() |
Из двух Г-образных фильтров можно образовать симметричные Т-
образные и П-образные фильтры.
Фильтры типа k обладают двумя существенными недостатками.
Во-первых, они имеют малую крутизну характеристики ослабления АС, что требует использования при построении реальных фильтров очень большого числа Г-
, Т- или П-образных схем.
Во-вторых, частотная зависимость характеристических сопротивлений в
полосе пропускания не позволяет удовлетворительно согласовать фильтр с на-
грузкой и генератором. Это приводит к потерям энергии за счет ее отражения и, как следствие, рабочее ослабление фильтра в полосе пропускания значительно отлича-
ется от нуля, особенно на краях полосы пропускания, где рассогласование наиболь-
шее.
Чтобы избежать этих недостатков, используют фильтры типа т (рисунок
5.4), которые дают всплески ослабленияАС на частоте резонанса контуровWµ.
Своё название фильтры получили из-за того, что значения элементов фильтра типа
m определяются значениями фильтра типаk и параметра m = 
 W ¥2 - 1 / W¥ .
W ¥2 - 1 / W¥ .
Фильтры типа m:
а) обладают меньшей частотной зависимостью характеристических сопро-
тивлений в полосе пропускания, и
б) лучше согласуются с генератором и нагрузкой.
mL |
mL |
|
Wµ Wµ
1-m2 |
|
|
|
2mC |
1-m2 |
|||
|
C |
|
|
|
|
|
C |
|
|
|
|
|
|
||||
m |
|
|
|
|
|
m |
||
2mL
|
1-m2 |
C |
1-m2 |
L |
|
|
|||||
m |
|||||
|
m |
|
|||
mC |
|
|
|
mC |
|
|
|
|
|||
|
|
|
|||
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 5.4 – Фильтры типа m
Но фильтры типа т:
в) имеют в полосе непропускания глубокий спад ослабления АС.
Обычно используют каскадное соединение фильтров типат и k. Фильтры типа k увеличивают ослабление в полосе непропускания, а фильтры типат поднимают крутизну характеристики ослабления вблизи частоты среза.
Ввиду того, что фильтры типа т лучше согласуются с генератором и на-
грузкой, их ставят по краям, а звенья типа k – в середине составного фильтра.

5.1 ЯВЛЕНИЕ ВЗАИМНОЙ ИНДУКЦИИ
При протекании тока i1 (рисунок 5.5) в катушке индуктивности L1 в окру-
жающем пространстве, согласно закону электромагнитной индукции, создается
магнитный поток Ф11.
Рисунок 5.5 – Магнитная связь катушек индуктивности
Если какая-либо часть этого потокаФ12 пронизывает витки другой ка-
тушки с L2, то в последней наводится ЭДС взаимной индукци,иопределяемая законом Максвелла-Фарадея:
eМ2 = -М12 |
di1 |
, |
() |
|
dt |
||||
|
|
|
где М12 – коэффициент взаимной индуктивности катушек L1 и L2.
Единица измерения взаимной индуктивности – Генри (Гн).
Знак «–» в уравнении () определяется согласно правилу Ленца направлением индукционного тока, который имеет такую ориентацию, чтобы создаваемый им магнитный поток препятствовал тому изменению магнитного потока Ф12, ко-
торое этот ток вызывает.
Напряжение взаимоиндукции на зажимах катушки индуктивности L2:
u M2 = -eM2 |
= M12 |
di1 |
. |
() |
|
||||
|
|
dt |
|
|
Если напряжение u приложено к катушке индуктивности L1, то под дейст-
вием тока i2 в катушке L1 также будет наведена ЭДС взаимной индукции:
eM = -M |
21 |
di 2 |
. |
() |
|
||||
1 |
|
dt |
|
|
|
|
|
||
В соответствии с принципом взаимности для линейных цепей М12 = М21.
Рассмотренная выше индуктивная связь носит односторонний характ:ер
ток i1 вызывает ЭДС взаимоиндукции еМ2 или ток i2 вызывает ЭДС eM1. (В слу-
чае замыкания катушки L2 на конечное сопротивление R (рисунок 5.5) в последней под воздействием uМ2 потечет индукционный ток i2, который, в свою очередь, вызо-
вет в первой катушке L1 ЭДС взаимоиндукции еМ1.)
Таким образом, установится двухсторонняя индуктивная связь катушек
L1 и L2. При этом каждая из катушек L1, и L2 будет пронизываться двумя маг-
нитными потоками: самоиндукции, вызванным собственным током, и взаи-
моиндукции, вызванным током другой катушки.
Следовательно, в катушке L1 индуцируется ЭДС
e |
= e |
L |
|
+ e |
M |
|
= -L |
di1 |
- M |
21 |
di2 |
, |
|
|
|
|
|||||||||
1 |
|
|
|
|
1 |
|
dt |
() |
||||
|
|
|
1 |
|
|
1 |
|
dt |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||
а в катушке L2 ЭДС:
e2 = eL2 + eM2 |
= -L2 |
di2 |
- M12 |
di1 |
, |
|
|
|
() |
||||
|
|
dt |
dt |
|||
Взаимное направление потоков само- и взаимоиндукции зависит как от на-
правления токов в катушках, так и от их взаимного расположени.яСледова-
тельно, для определения вида включенияL1 и L2 на схеме достаточно опреде-
лить, как ориентированы токи i1 и i2 |
относительно одноименных |
зажи- |
|
мов |
(на рисунке 5.6 обозначены точкой): |
при одинаковой ориентации |
име- |
ем |
согласное, a при разной – встречное включение. |
|
|

То есть, если катушки включаются таким образом, что потоки само- и
взаимоиндукции |
складываются, |
то |
такоевключение |
называется |
|||
согласным. |
|
|
|
|
|
|
|
Если же потоки само- и взаимоиндукции вычитаются, то такое включение
принято называть встречным.
Рисунок 5.6 – Согласное и встречное включение катушек индуктивности
Степень связи |
между L1 и L2 принято |
характеризовать коэффици- |
|||
ентом связи k: |
|
|
|||
k = |
|
|
, |
|
() |
|
k12k 21 |
|
|||
где коэффициенты |
|
|
|||
k12 |
= F12 / F11 |
и k21 = F21 / F22 |
() |
||
характеризуют одностороннюю связь между катушками L1 и L2.
Магнитные потоки Ф12, Ф21, Ф11 и Ф22 можно выразить через параметры катушек L1 и L2, М12, М21 и токи il, i2 с помощью формул:
Φ11 = L1i1/w1; Φ12 = M12i1/w 2 ; Φ21 = M21i2 /w1; Φ22 = L2i2 /w 2 , ()
где w1, w2 – число витков катушек L1 и L2 соответственно.
После подстановки данных формул в предыдущие, получим для коэффици-
ента связи:
k = M/
 L1L2 , ()
L1L2 , ()
где М12 = М21 = М.
Значение k изменяется в пределах от 0 (отсутствие связи) до 1 (сильная связь).