

8.1.4.Измерительные цепи индуктивных ип
 Основными
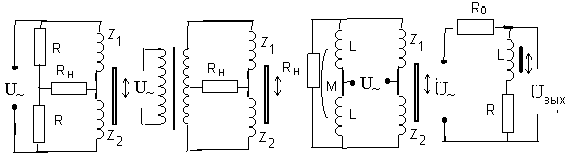
измерительными цепями индуктивных ИП
являются мостовые цепи (рис. 8.3 а, б, в).
Иногда индуктивный преобразователь
включается в делитель напряжения (рис.
8.3 г) или колебательныйL–Cконтур генератора.
Наиболее распространенной является
мостовая измерительная цепь, работающая
в неравновесном режиме, при этом ток в
нагрузке сдвинут по фазе относительно
напряжения питания. Уравновешивание
моста в начальном положении производится
по двум составляющим.
Основными
измерительными цепями индуктивных ИП
являются мостовые цепи (рис. 8.3 а, б, в).
Иногда индуктивный преобразователь
включается в делитель напряжения (рис.
8.3 г) или колебательныйL–Cконтур генератора.
Наиболее распространенной является
мостовая измерительная цепь, работающая
в неравновесном режиме, при этом ток в
нагрузке сдвинут по фазе относительно
напряжения питания. Уравновешивание
моста в начальном положении производится
по двум составляющим.
а) б) в) г)
Рис. 8.3
8.2. Трансформаторные ип
8.2.1. Принцип действия, конструкции, достоинства и недостатки
Принцип действия трансформаторных (взаимоиндуктивных) ИП основан на изменении взаимной индуктивности между двумя обмотками под действием входного сигнала. Одна из обмоток является намагничивающей, а с другой снимается напряжение.
Конструкции магнитной цепи трансформаторных и индуктивных ИП одинаковы, отличаются они числом обмоток. Трансформаторные ИП с изменяющимся воздушным зазором (рис. 8.4 а) и переменной площадью воздушного зазора (рис. 8.4 б) состоят из магнитопровода 1, на который намотаны две обмотки 2 (обмотка возбуждения) и 3 (вторичная обмотка), и подвижного якоря 4 из ферромагнитного материала. При перемещении подвижного якоря изменяется магнитное сопротивление RМ и взаимная индуктивность М между обмотками. Если токI1, протекающий по обмотке 2, остается постоянным, то ЭДС индуктированная во вторичной обмотке 3, будет определяться как
Е2 = j w1 w2 I1/ RМ, (8.8)
где w1 иw2 - число витков обмотки возбуждения и вторичной обмотки;- частота.
Подставив в (8.8) выражение для магнитного сопротивления (8.2), получим уравнение преобразования трансформаторного преобразователя с переменным воздушным зазором (рис. 8.4 а)


 Е2
= j0
Q
w1 w2
I1/
(2
+ lСТ/r)
j0
Q
w1 w2
I1/
2.
(8.9)
Е2
= j0
Q
w1 w2
I1/
(2
+ lСТ/r)
j0
Q
w1 w2
I1/
2.
(8.9)

 а) б)
в)
а) б)
в)
г) д)
Рис. 8.4
В преобразователе (рис. 8.4 в) обмотка 3 выполнена в виде рамки, которая может поворачиваться в кольцевом зазоре полюсных наконечников 4. При включении обмотки 2 в цепь переменного тока в обмотке 3 наводится ЭДС Е2. При повороте рамки 3 значение ЭДС Е2изменяется. Функция преобразования трансформаторного ИП с подвижной обмоткой может быть записана в виде [9]
Е2 = 2 w2 U~/ (w1), (8.10)
где – угол поворота рамки относительно горизонтального положенияО.
В крайних положениях рамки (1и2) индуктированная в ней Е2 имеет максимальное значение. В горизонтальном положении (О) рамки 3 ЭДС Е2равна нулю, причем при переходе рамки через горизонтальное положение ЭДС меняет фазу на 180О. Для сдвига характеристики преобразования последовательно с обмоткой 3 включают дополнительную обмотку 5. В данных преобразователях могут быть использованы ферродинамические измерительные механизмы и сами преобразователи иногда называют ферродинамическими [10].
В преобразователе с распределенными параметрами (рис. 8.4 г) при перемещении подвижной обмотки в воздушном зазоре изменяется полный поток, сцепляющийся с витками подвижной обмотки. Если магнитное сопротивление участка магнитопровода 1, по которому перемещается подвижная обмотка 3, мало по сравнению с магнитным сопротивлением воздушного зазора, то зависимость индуктированной ЭДС Е2практически линейно зависит от перемещения обмотки 3. Изменяя профиль магнитопровода, можно получить заданную функцию преобразования трансформаторного ИП.
К достоинствам трансформаторных ИПможно отнести: 1) отсутствие гальванической связи между цепями питания и выхода; 2) возможность их использования без измерительных схем.
К недостаткамотносятся влияние перемещения подвижного якоря на ток в первичной цепи.
Область применения трансформаторных ИП аналогична области применения индуктивных ИП.