

Введение: а) История развития и современное состояние автоматики
Автоматика – (от греческого слова автоматос) – самодвижущийся. Первые сведения об автоматических устройствах появились во 2 в. н. э. В первых трудах Александрийского описывались автоматы по открытию дверей храма, дозаторы воды. Создавали автоматы, подражающие действию людей. Известны швейцарские часовщики Пьер и Анри Дрю – механическая пианистка, механический писец (обвинили в колдовстве, посадили).
Промышленное внедрение автоматики связано с промышленным переворотом в Европе (автоматический регулятор уровня воды в котле паровой машины1736 г, Ползунов; затем регулятор скорости паровой машины Уолт 1756 г.(Англия)). Появилась первая книга русского ученого Ляпунов о регуляторах прямого действия.
В истории автоматики 3 этапа развития:
- появление автоматики связано с изобретением Яковлева электродвигателя постоянного тока, Шиллинга – электромагнитного реле, Далибо-Добровольского - асинхронного 3-х фазного двигателя.
- появление радиоэлектроники связано с открытием русским ученым Сталетовым явления фотоэффекта и Поповым радио.
- появление ЭВМ в качестве основного устройства для вычислительной техники и управления технологическими процессами. Винер в 1946 г. опубликовал книгу «Кибернетика или контроль связи у животных и машин. Найдена аналогия между процессами происходящими в мозгу человека и автоматического устройства. Методы кибернетики, которые включают теорию автоматического регулирования, математического моделирования процессов и явлений, применимы до настоящего времени.
В настоящее время для управления технологическими процессами используется система приборов, кот. выполняют сложные функции управления технологических процессов. Также современный этап связан с разработкой АСУТП. В данной системе АСУТП управление ТП осуществляется с помощью ЭВМ, а оценивает работу ЭВМ технолог-оператор.
Введение б) Классификация автоматических систем
Механизация – замена труда человека в производственных операциях работой машин. В механизированном производстве машиной управляет человек.
Автоматизация – замена человека в пункте управления машинами, специальными техническими устройствами (ТУ).
Совокупность процесса и средств автоматизации для управления называется автоматизированной системой (АС).
По принципу действия и по назначению АС подразделяются на следующие типы:
1) дистанционное управление – управление машинами на сравнительно небольшое расстояние. Например, управление конвейером. В условиях частичной автоматизации данное управление является основным. В условиях полной автоматизации - дублирующий. Как правило, все АС дублируются ручным управлением, и оно включается при отказе основной системы.
2) телеуправление – управление объектами со сравнительно большого расстояния. При этом необходимо по 1 каналу связи передать большое число команд из пульта управления к объекту управления командный сигнал, кот.кодируется. На объекте управления команды расшифровываются и реализуется обратной сигнализацией на пульт управления. Пример: насосная станция, тепловой пункт.
3) система автоматического управления – система для управления сложными циклами работы с помощью технических средств без участия человека.

 Схема
соединения основных элементов данной
автоматической системы приведена
рисунке
Схема
соединения основных элементов данной
автоматической системы приведена
рисунке
ОУ ИУ УУ командный сигнал
ОУ - объект управления
ИУ - исполнительное устройство
УУ - управляющее устройство
Внешний КС преобразуется в управляющее воздействие, которое поступает на ИУ. Данное устройство воздействует на объект, изменяя режим его работы в соответствии с величиной КС. (Пример: работа технологического оборудования-крышка реактора; цепочка соединенных аппаратов)
4) автоматический контроль – предназначен для автоматического измерения параметров процессов и аппаратов, для учета энергоресурсов и т.д.
Схема соединения элементов данной системы приведена на рисунке

 ОУ
Д
ВП
ОУ
Д
ВП
Д – датчик, кот.воспринимает величину технологического параметра и преобразует его в сигнал для дальнейшей передачи
ВП - вторичный прибор, по шкале кот.определяется значение контролирующего ТП
Шкала ВП градуируется в единицах измеряемого параметра.
5) автоматическое регулирование – обеспечивает поддержание на заданном уровне какого-либо параметра без участия человека и с помощью устройств автоматического регулятора.
Это основная система при управлении ХТП.
Блок-схема автоматического регулирования: ОР - объект регулирования
С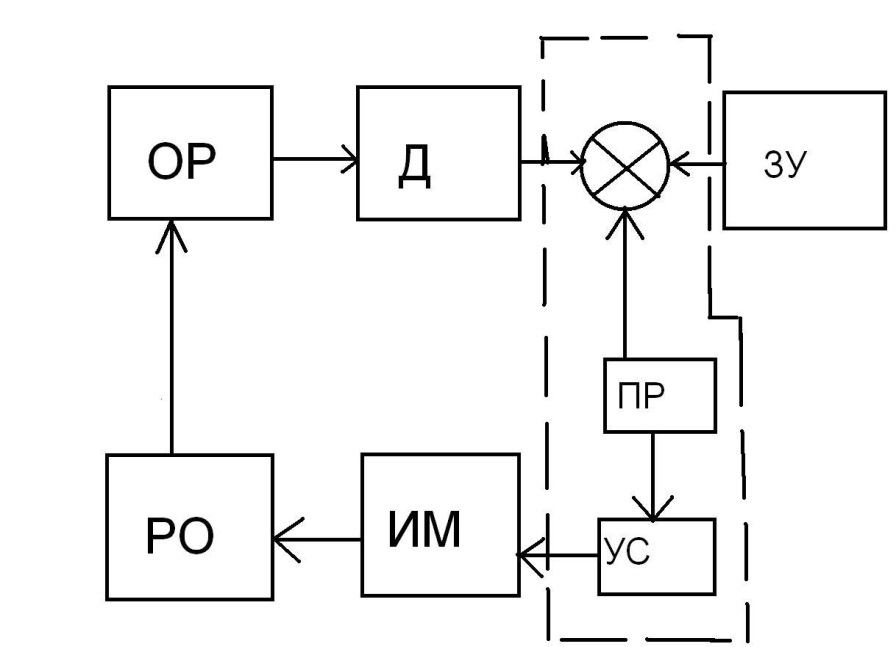 У
- сравнивающее устройство
У
- сравнивающее устройство
ЗУ - задающее устройство
ПР - преобразователь
УС - усилитель
УМ - исполнительный механизм
РО - регулирующий орган
Д воспринимает
величину технологического параметра
и преобразовывает ее в электрический
сигнал
 соответствующий
значению данного параметра. ЗУ формирует
электрический сигнал
соответствующий
значению данного параметра. ЗУ формирует
электрический сигнал
 пропорционально заданному значению
технологического параметра в ОФ. Оба
сигнала сравниваются в СУ и на выходе
формируется сигнал
пропорционально заданному значению
технологического параметра в ОФ. Оба
сигнала сравниваются в СУ и на выходе
формируется сигнал
 равный разности сигналов
равный разности сигналов

- рассогласование или ошибка регулирования.
Она возникает, когда текущее значение параметра отличается от заданного его значения, согласно технологическому регламенту.
Цель работы данной системы - устранить , чтобы в ОР поддерживалось заданное значение параметра. преобразовывается в ПР по заданному закону регулирования, усиливается в УС и на выходе регулятора формируется регулируемое воздействие М функции от величины .
Сигнал пропорциональный М поступает в ИМ, который жестко связан РО. Данный РО приводится в движение ИМ и изменяемый сигнал поступает в ОР. Следовательно, изменяется значение регулирующей величины и будет изменяться до тех пор пока = .
технологическая сигнализация – все мханизмы снабжаются сигнализацией. Подразделяется на следующие виды:
1. Аварийная – для извещении об аварии на объекте. Выполняется звуковой и световой сигнал. Звук вначале в виде сирены, далее свет указывающий на конкретный аппарат.
2. Контрольная - извещает о состоянии объекта.
3. Предупредительная - предназначена для извещении персонала об переключении оборудования
7) автоматическая защита – предназначена для отключения оборудования, находящегося в аварийном состоянии (защита от короткого замыкания).
8) автоматическая блокировка - делится на 2 вида:
- Аварийная - служит для отключения аппаратов, находящихся в технологической цепи до аппаратов, находящихся в аварийном состоянии.
- Запретно-разрешающая - предназначена для исключения несанкционированных действий персонала по управлению сложными процессами. Данная система позволяет произвольно отключить аппарат.
1.1 Элементы ау. Функции и характеристики элементов автоматических устройств
Каждая АС состоит из отдельных элементов, выполняющих опр-ую ф-цию. Каждый элемент воспринимает сигнал, поступающий от предыдущих эл-тов осущ-ют кол-нное и кач-нное преобразование сигнала и передает его другому, т.е. каждый элемент явл-ся преобразователем некоторого входного сигнала X в выходной сигнал У.
Схема данного элемента имеет следующий вид:
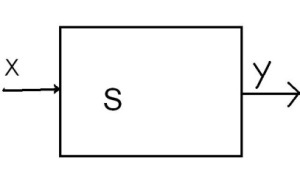
В данной схеме происходит преобразование входного сигнала Х в выходной сигнал У за счет энергии входного сигнала Х. Пример: термометр сопротивления, термопара и др.
Существуют элементы, на которые подается сигнал от дополнительных источников Е. Схема элементов имеет следующий вид.
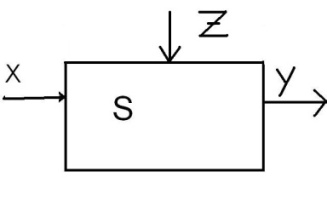
Z - сигнал от элемента или пневматического устройства;
X - управляет передачей E от Z к Y.
Пример: усилители, реле и т.д.
По назначению все элементы автом-кий устройств делятся на следующие виды:
- датчики; - автоматические регуляторы; - исполнительные механизмы; - регулирующие органы (вентили, краны); - реле; - усилители; - элементы дистанционных передач (электрические и пневмотические преобразователи)
Основными характеристиками каждого элемента являются величины входного сигнала Х и выходного сигнала У:
1) - статический передаточный коэф-т
- статический передаточный коэф-т
2) -
динамический передаточный коэффициентигнала
(приращение выходного и входного с)
-
динамический передаточный коэффициентигнала
(приращение выходного и входного с)
3) -
относительный динамический передаточный
коэффициент
-
относительный динамический передаточный
коэффициент
Данные коэф-ты называются по-разному: для датчиков это чувствительность, а для усилителей – коэффициент усиления, для др. – коэф-т передачи.
При работе каждого
элемента возникает погрешность, которая
заключается в отклонении фактического
значения выходной величины
 от его расчетного значения
от его расчетного значения
 .
Эта погрешность связана с износом
материала элемента, с отклонением
.
Эта погрешность связана с износом
материала элемента, с отклонением
 питающей сети от номинального, а также
с изменением условий окружающей среды.
питающей сети от номинального, а также
с изменением условий окружающей среды.
Различают следующие
виды погрешности: 1. Абсолютная
- это разность:
 .2.
Относительная
.2.
Относительная
 .
3. Относительная
приведенная
.
3. Относительная
приведенная
 -
она называется еще и класс точности
прибора, как правило он указывается на
шкалах всех приборов.
-
она называется еще и класс точности
прибора, как правило он указывается на
шкалах всех приборов.
1.2 Датчики, основные показатели и характеристики
Датчик – функциональное устройство, кот. преобразует физическую величину одного рода в физическую величину другого рода, удобную для передачи другим элементам и на усиление.
Основные характеристики:
1). Статическая характеристика y=f(x)
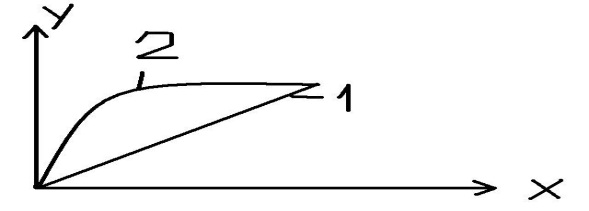
1 - линейная
характеристика, поэтому чувствительность
 будет постоянной для всего диапазона
х.
будет постоянной для всего диапазона
х.
2 – нелинейная характеристика – чувствительность различна в различных точках крутизны данной характеристики.

Датчики, в кот.
статич. хар-ка непрерывна наз-ся датчиками
непрер-го действия или функциональными.
Если стат-кая хар-ка описывается след.
ф-цией
 ,
где k=const, то такой датчик наз-ся линейным.
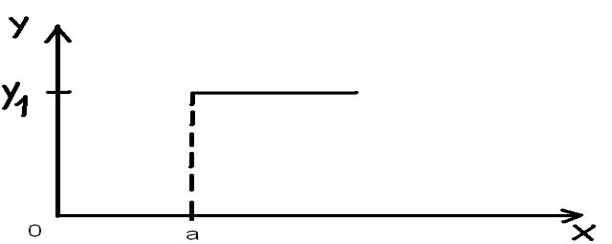
Если стат-кая хар-ка датчика имеет
разрывный характер вида y=0 при 0<x<a,
y=y1
при x>a, то датчик наз-ся релейным.
,
где k=const, то такой датчик наз-ся линейным.
Если стат-кая хар-ка датчика имеет
разрывный характер вида y=0 при 0<x<a,
y=y1
при x>a, то датчик наз-ся релейным.
2). Динамическая характеристика - зависимость y от времени при скачкообразном изменении входной величины x.
y=f(t) при x=const
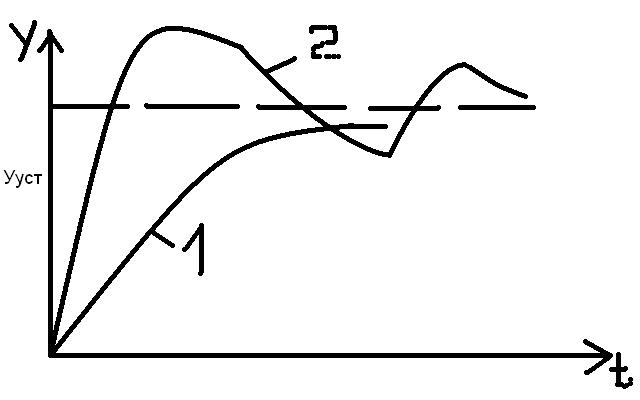
1 – экспонинциальные.
2 - колебательный затухающий процесс.
По виду выходной величины сигнала у датчики делятся на:
- омические (резисторные)
- емкостные
- индуктивные
- термоэлектрические
- трансформаторные
По виду входной величины Х:
- датчики температуры
- давления
- влажности
- расхода состава
- плотности
- перемещения и т.д.