

1.Основные гипотезы курса. Понятие о расчетной схеме. Классификация расчетной схемы сооружений.
Строительная механика – это наука о методах расчетов инженерных сооружений, на прочность, жесткость и устойчивоть.
Прочность – это способность конструкций выдерживать заданную нагрузку не разрушаясь.
Жесткость – это способность конструкций сохранять в определенных пределах свою форму.
Устойчивость – это способность конструкции сохронять при действии внешних сил заданную форму равновесия.
Расчетная схема – это упрощенная, идеализированная схема, которая отражает наиболее существенные особенности объекта, определяющие его поведение под нагрузкой.
Расчет реальной конструкции начинается с выбора расчетной схемы. Выбор расчетной схемы начинается со схематизации свойств материала и характера деформирования твердого тела, затем выполняется схематизация геометрической формы реального объекта.
Классификация расчётных схем
• По характеру учёта пространственной работы – одно-, двух- и трёхмерные.
• По виду неизвестных – дискретные, дискретно-континуальные и континуальные.
• По виду конструкций, положенных в основу расчётной схемы – стержневые, пластинчатые, оболочковые и массивные.
• По учёту инерционных сил – статические и динамические.
2.Кинематический анализ сооружений. Понятие о степени свободы. Способы образования простейших геометрически неизменимых сил.
Внешняя нагрузка может вызвать значительные перемещения элементов сооружения, в результате чего оно может перестать служить своему предназначению. Поэтому ставится требование: перемещения сооружения должны быть малыми. Решением этой задачи на начальном этапе проектирования занимается специальный раздел строительной механики, называемый кинематическим анализом.
Кинематический анализ – это анализ геометрической структуры сооружения с целью исключения больших перемещений. При кинематическом анализе внешняя нагрузка обычно не рассматривается, а элементы системы считаются достаточно жесткими.
В кинематическом анализе различаются три типа расчетных схем:
1) геометрически неизменяемые системы,
2) геометрически изменяемые системы,
3) мгновенно изменяемые системы.
Геометрически неизменяемая система (ГНС) – это система, перемещения которой возможны только при деформации ее элементов. Простейшей ГНС является шарнирный треугольник (рис. 2.1 а).
Геометрически изменяемая система (ГИС) – это система, элементы которой могут получать перемещения даже без их деформаций. Например, изменяемой является шарнирный четырехугольник (рис. 2.1 б).
Мгновенно изменяемая система (МИС) – система, способная получать лишь мгновенные перемещения (рис. 2.1 в).

Рис. 2.1
Степень свободы – число независимых параметров определяющих положения системы или тела.
Количественная оценка кинематических свойств системы основана на определении ее степеней свободы как направлений возможных независимых перемещений. Число степеней свободы (W) – это минимальное число независимых параметров, необходимых для определения положения всех точек системы. Такими параметрами могут быть перемещения отдельных точек, углы поворота элементов и др.
Число степеней свободы простых систем можно определять путем задания ее элементам возможных перемещений (рис. 2.2 а, б, в).
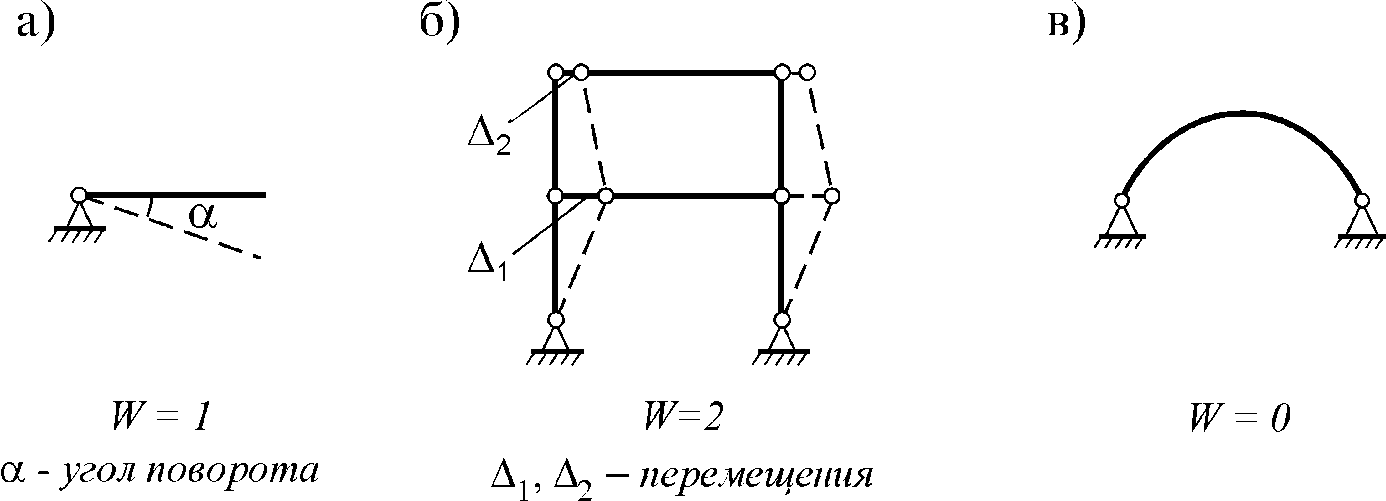
Рис. 2.2
Для изучения более сложных случаев введем следующие понятия:
диск (Д) – неизменяемая часть системы, состоящая из одного или нескольких жестко связанных элементов (рис. 2.3 а);
шарнир (Ш) – связь, дающая возможность взаимного поворота соседним дискам (рис. 2.3 б);
припайка (П) – связь, жестко закрепляющая соседние диски (рис. 2.3 в);
стержень (С) – связь, ограничивающая перемещение диска в одном направлении (рис. 2.3 г);
опорная связь (С0) – связь, ограничивающая перемещение диска в одном направлении по отношению к земле (рис. 2.3 д).

Рис. 2.3
Определим число степеней свободы точки (рис. 2.4 а) и диска с различными кинематическими связями (рис. 2.4 б-д):
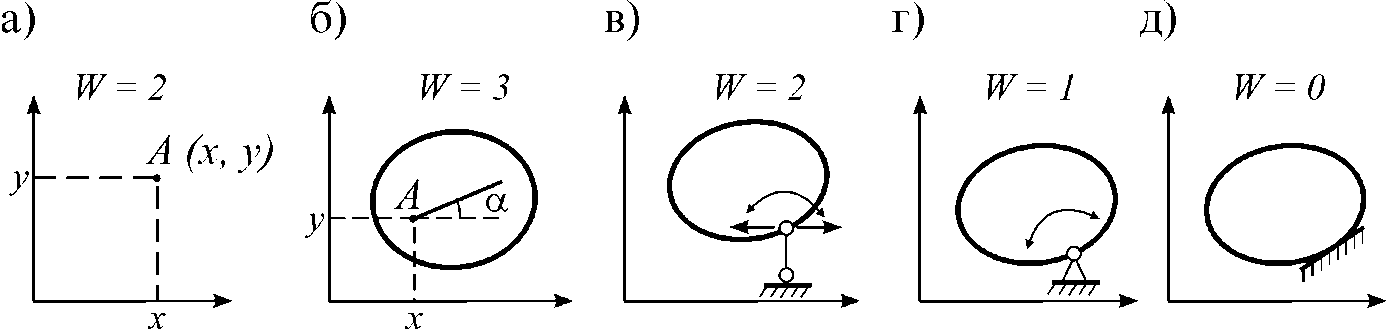
Рис. 2.4
Как видим, стержень или опорная связь уменьшают число степеней свободы на единицу, шарниры – на два, припайки – на три.
Кинематические связи должны обеспечивать неподвижность системы относительно земли (основания), а также неизменяемость ее внутренней структуры. Если при удалении одной связи из неизменяемой системы она становится изменяемой, то эта связь называется необходимой. Если после этого система остается неизменяемой, то связь называется избыточной. Связь, соединяющая систему с землей, называется внешней, а находящаяся внутри – внутренней связью.
Шарнир, объединяющий два диска, называется простым шарниром (рис. 2.5 а). Если шарнир объединяет несколько дисков, то он называется кратным шарниром. Кратный шарнир эквивалентен нескольким простым шарнирам. Кратность шарнира определяется по формуле nШ=nД –1, где nД – число дисков, объединяемых шарниром.
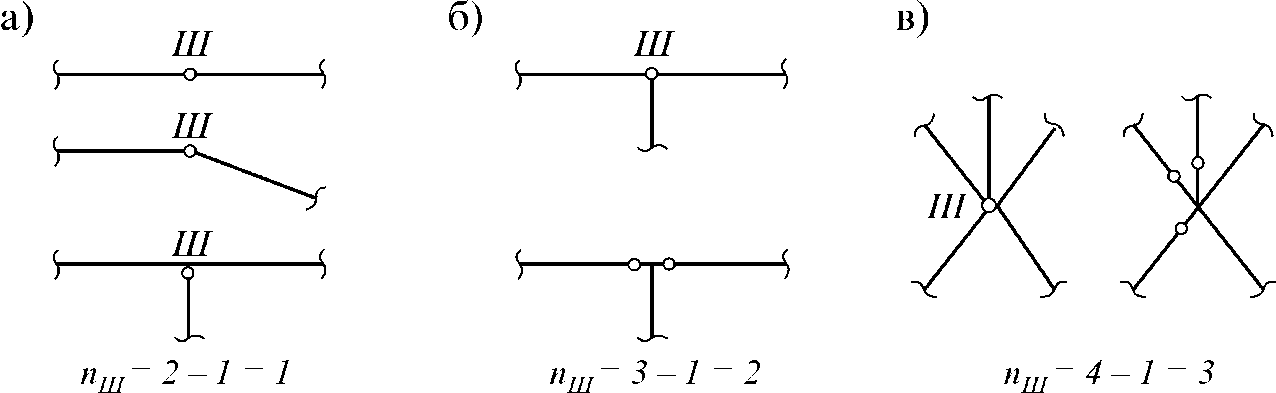
Рис. 2.5