

1. Принципы и базовые алгоритмы обработки сигналов в цифровых системах. Требования к аппаратной базе для выполнения базовых операций цос.
Цифровая обработка сигналов (ЦОС) – это арифметическая обработка в реальном времени последовательности значений амплитуды сигнала, определяемых через равные временные промежутки.
Принципы цифровой обработки сигналов:
Цифровое представление сигналов с необходимой точностью.
Выполнение в реальном, или близком к реальному, масштабе времени большого количества вычислительных операций надо потоками данных (массивами), в том числе и бесконечными во времени.
Основными алгоритмами ЦОС являются:
БИХ- и КИХ-фильтрация сигнала;
корреляционная функция двух сигналов или автокорреляционная функция сигнала;
прямое/обратное преобразование Фурье;
помехоустойчивое (канальное) кодирование;
формирование пакетов для передачи по каналам связи;
векторное квантование;
модуляция и демодуляция узкополосных сигналов.
Фильтрация сигналов
В области ЦОС выделяют фильтры следующих видов:
с конечной импульсной характеристикой (КИХ);
с бесконечной импульсной характеристикой (БИХ).
В КИХ-фильтре отсчет выходного сигнала определяется только значениями входного сигнала и задается уравнением вида:

где xn и yn – соответственно отсчеты входного и выходного сигналов, N – порядок фильтра (количество коэффициентов), bk – коэффициенты фильтра.
В БИХ-фильтре отсчет выходного сигнала определяется значениями входного сигнала и предыдущими значениями выходного сигнала:
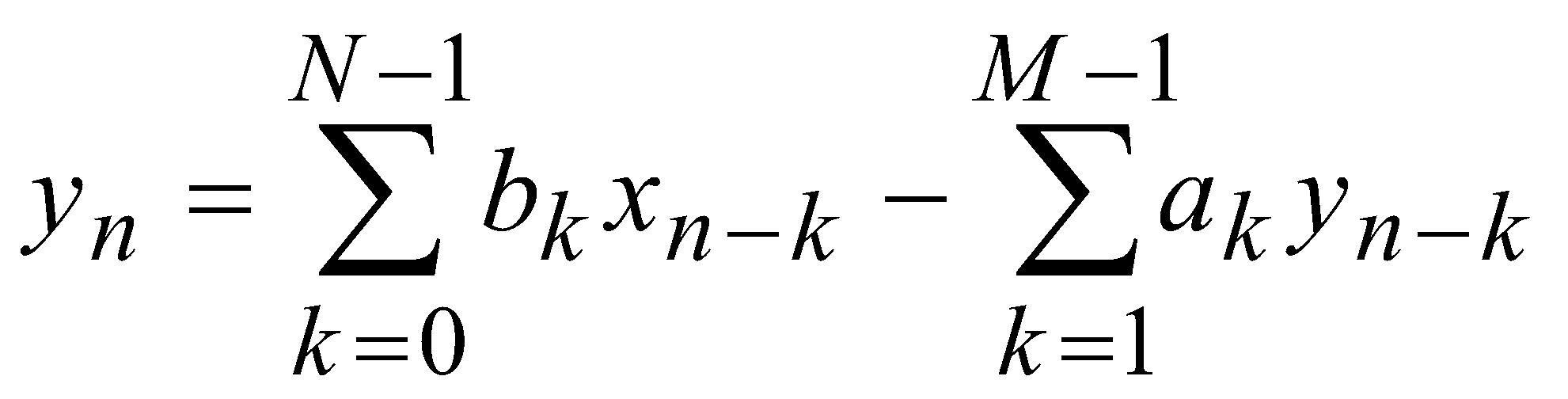
Для эффективной реализации необходимы:
выполнение операций «умножения с накоплением»;
одновременная выборка из памяти двух операндов;
доступ к памяти с автоматической модификацией указателя;
циклическая организация буфера (кольцевые буферы);
аппаратная поддержка циклов.
Фурье-преобразование сигнала
В системах цифровой обработки сигналов чаще используется быстрое преобразование Фурье. Его реализация приводит к существенному уменьшению вычислительной сложности. Основная идея быстрого преобразования Фурье состоит в том, чтобы разбить исходный N-отсчетный сигнал x(n) на два более коротких сигнала, преобразования которых далее комбинируются таким образом, чтобы получить преобразование исходного N-отсчетного сигнала.
Вычисление N-точечного (отсчетного) преобразования можно произвести путем вычисления двух N/2-точечных. Для указанных условий Фурье-преобразование имеет следующий вид:

![]() ;
;
![]() ;
;
![]()
Аналогично, два N/2-точечных преобразования можно свести к четырем N/4-точечным и так далее. При этом сокращение объема вычислений составит:
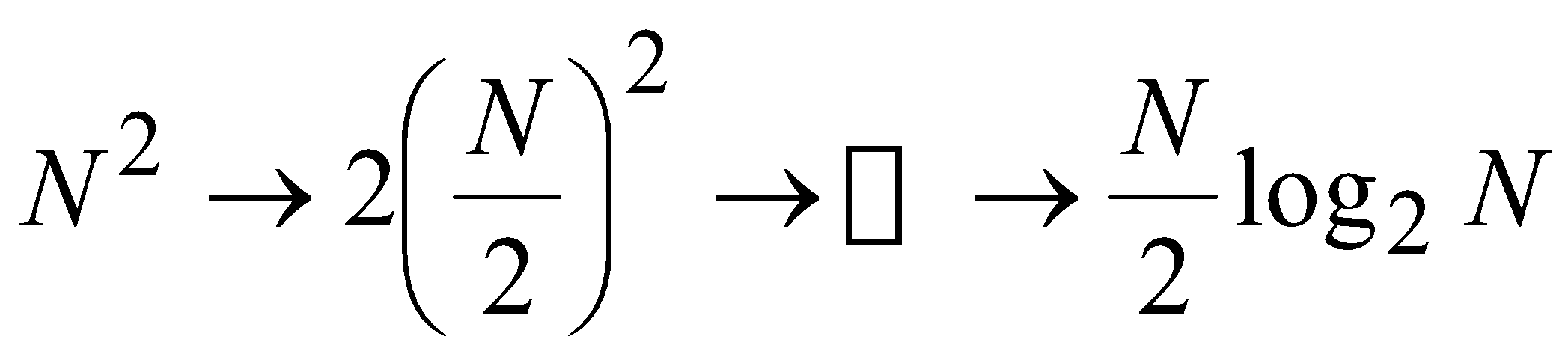 .
.
Для эффективной реализации необходимы:
бит-реверсная адресация;
дуальное сложение/вычитание;
умножение с накоплением;
аппаратная поддержка циклов;
табличная реализация функций sin, cos.
Пример: порядок адресации элементов при выполнении, например, четырех 2-х точечных преобразования (при N=8) будет такой:
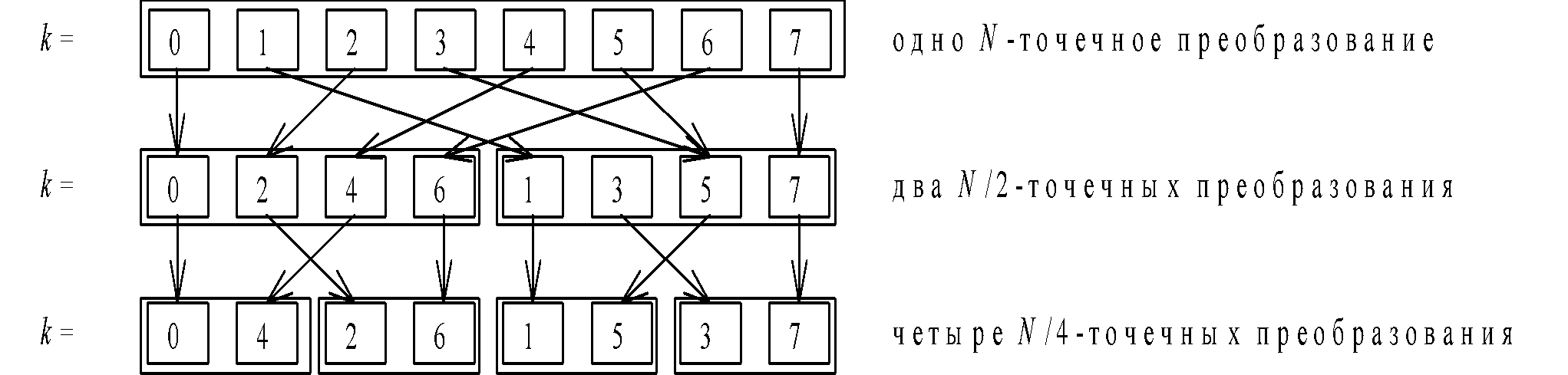
Представим адреса элементов в двоичном коде и переставим биты в обратном (реверсном) порядке:
-
Прямой:
000
001
010
011
100
101
110
111
Реверсный:
000
100
010
110
001
101
011
111
Значение:
0
4
2
6
1
5
3
7
Формирование пакетов данных
Формирование тела пакета, а также его заголовка и хвостовика в соответствии с требованиями конкретного приложения и протоколом обмена данными. Реализация депонирования битовых полей – при формировании пакета, когда требуемое значение помещается в формируемое слово в нужную позицию и занимает правильное количество битов без использования дополнительных операций сдвигов. Выделение битовых полей – при распознавании пакета, обратная операция.
Требования к аппаратной базе для выполнения базовых операций ЦОС:
выполнение операций «умножения с накоплением»;
одновременная выборка из памяти двух операндов;
доступ к памяти с автоматической модификацией указателя;
циклическая организация буфера (кольцевые буферы);
аппаратная поддержка циклов (автоматическая проверка условия выхода из цикла без потери тактов);
дуальное сложение/вычитание;
бит-реверсная адресация;
повышенная точность представления операндов;
табличная реализация элементарных функций;
эффективный доступ к битовым полям.
2. Обобщенная архитектура сигнальных процессоров: фундаментальные особенности. Способы взаимодействия DSP-процессора с внешними устройствами различных типов. Методы оценки производительности процессоров.
Цифровой сигнальный процессор представляет собой специализированный процессор с RISC-архитектурой (архитектура процессора, в котором быстродействие увеличивается за счёт упрощения инструкций, сокращён объём (и время) работы, выполняемый каждой инструкцией), предназначенный для решения задач цифровой обработки сигналов.
Принципиальные особенности архитектуры сигнальных процессоров:
принцип «детерминированного выполнения» - можно заранее сказать, как долго тот или иной фрагмент кода будет выполняться на сигнальном процессоре;
Гарвардская архитектура – предполагает наличие двух раздельных пространств для хранения данных и инструкций и отдельных шин для каждого из них. Шины функционируют независимо, инструкция и данные могут быть извлечены одновременно. Следующий уровень - Супер-Гарвардская архитектура (SHARC – Super Harvard ARChitecture, термин введен фирмой Analog Devices), отличающаяся наличием кэша команд и контроллера ввода/вывода:
Контроллер ввода/вывода. Чтобы обеспечить ввод/вывод данных из процессора с высокой скоростью, не снижая вычислительных возможностей процессора, контроллер ввода/вывода посредством механизма прямого доступ к памяти (Direct Memory Access, DMA) позволяет записывать и считывать данные напрямую из внутренней памяти процессора.
элементы RISC-архитектуры. Конвейеризация и сокращение длительности командного цикла – обычно применяется двух- или трехкаскадный конвейер – выполняются одновременно две или три инструкции, размещение операндов в регистрах, использование теневых регистров, аппаратная поддержка циклов;
аппаратная реализация типовых операций ЦОС – аппаратный умножитель для сокращения времени операции умножения;
специализированные команды ЦОС – оптимизированы для выполнения базовых задач цифровой обработки сигналов;
расширенные коммуникационные возможности – наличие встроенных АЦП и ЦАП.
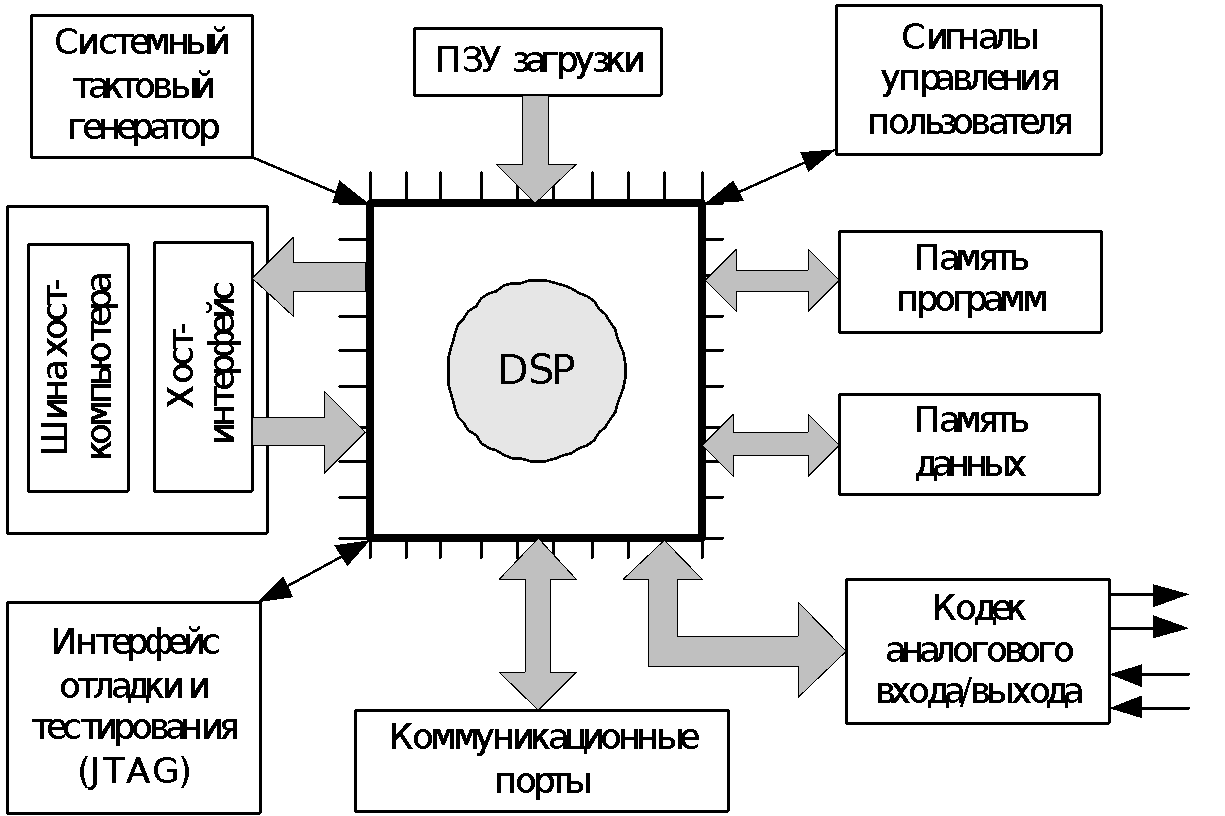
Взаимодействие с внешними устройствами
Обычно система ЦОС представляет собой комплексную аппаратную схему, включающую кроме DSP ряд внешних устройств. В нормальном режиме DSP работает синхронно с АЦП или КОДЕКОМ, принимая или выдавая данные с постоянным временным интервалом синхронно с сигналами тактового генератора, расположенного на плате.
В то же время DSP может обмениваться данными с хост-процессором или от схемы управления пользователем. Эти события происходят асинхронно, т.е. в произвольные моменты времени. Для обработки таких событий могут использоваться две схемы:
ввод/вывод данных с последовательным опросом (POLLED I/O), когда процессор просто "регулярно" проверяет состояния на определенных ножках и принимает решение в зависимости от уровня сигнала. Хотя эта схема проста, она приводит к снижению производительности, т.к. часть опросов выполняется "вхолостую";
управление с использованием прерываний. Как обычно, такая схема требует выделения таблицы векторов прерываний для обработки каждого внешнего сигнала и написания программно обработчика прерывания.
механизмы прямого доступа к памяти, которые позволяют организовать обмен большими объемами (блоками) данных между коммуникационными портами процессора и внутренней памятью без использования ресурсов процессорного ядра параллельно с ходом выполнения основной программы.
Также поддерживается отладка в реальном времени.
Методы оценки производительности
Производительность процессоров может оцениваться по нескольким критериям:
- MIPS – количество инструкций, выполняемых в секунду;
- MFLOPS, MOPS – оценки количества операций в секунду, которое может выполнить процессор, также без учета конкретного алгоритма.
- MMACS – количество операций умножения с накоплением в секунду.
Более комплексные метрики учитывают также стоимость, объем памяти и энергопотребление. Соответственно каждый процессор может представляться в виде параллелепипеда в системе координат с осями, соответствующими единицам энергопотребления (mA), производительности (MIPS), требуемого размера памяти (Кб).
Более реалистичные оценки производительности получают путем прогона на DSP определенных задач - типовых алгоритмов ЦОС, например, векторное произведение, сложение векторов, фильтры. Такая оценка позволяет оценить производительность всей системы.
Также используются оценки на наборах тестов (BDTImark2000 и др.) и оценки на типовых приложениях (Full Application Benchmark).