

1 Основные понятия и определения тау.
Автоматическое регулирование это поддержание постоянной заданной величины, характеризующей состояние объекта управления или изменение этой величины по определенному заданному закону регулирования. При этом это поддержание осуществляется путем измерения управляемых величин объекта управления и выработкой управляющего воздействия на данный объект.
Автоматическое управление это автоматическое выполнение ряда функций, обеспечивающих оптимальное функционирование системы с возможностью выбора из различных вариантов функционирования. При этом данные функции выполняются по алгоритмам, достигающим цель управления.
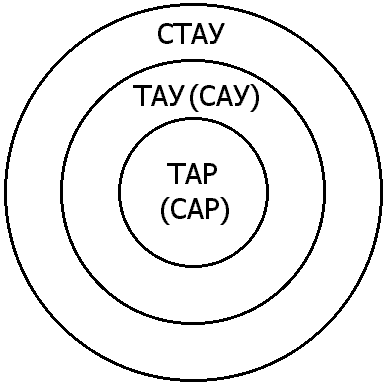
САР – система автоматического регулирования;
ТАР – теория автоматического регулирования;
САУ – система автоматического управления;
Объектом управления в ТАУ могут быть любые технические объекты, технологические процессы, а также более простые САУ. Любой объект характеризуется рядом величин, определяющих процессы в самом объекте, влияние внешней среды на объект, управляющие сигналы с регулятора.
Внешними воздействиями называют величины, влияющие на объект извне. Внешние воздействия бывают двух типов:
Управляющее воздействие (управляющий сигнал, управляющая входная величина) – это величина, характеризующая влияние регулятора на объект.
Возмущениявнешние воздействия, которые не управляют объектом, но оказывают влияние на функционирование объекта. Возмущения делятся на нагрузку – это внешние воздействия, обусловленные работой системы и помехи вредное влияние внешней среды, обусловленное побочными явлениями в объекте.
Величины, характеризующие изменения в самом объекте, называются внутренними величинами или состоянием объекта. Среди них следует выделить управляемую величину, по наблюдениям за которой и вырабатывается управляющее воздействие регулятора.
2. Классификация сау по характеру динамических процессов:
1) непрерывные САУ для любого звена выполняется следующее условие: непрерывному управляющему воздействию на входе звена соответствует непрерывное изменение управляемой величины.
Для непрерывных САУ характеристика непрерывная статическая.
2
X
Y )
дискретные САУ
это такие САУ, в которых хотя бы в одном
звене непрерывному входному сигналу
соответствует дискретный выходной
сигнал, такое звено, называется импульсным.
)
дискретные САУ
это такие САУ, в которых хотя бы в одном
звене непрерывному входному сигналу
соответствует дискретный выходной
сигнал, такое звено, называется импульсным.
Ц ифровое
САУСАУ,
в которых функции регулятора выполняет
цифровое устройство.
ифровое
САУСАУ,
в которых функции регулятора выполняет
цифровое устройство.
3) системы релейного действия это такие САУ, у которых хотя бы в одном звене статическая характеристика претерпевает скачок.


По принципу линейности динамических процессов.
1) Линейные САУ САУ, в которых динамика процессов, описывается обыкновенными линейными уравнениями. Для линейных САУ статическая характеристика линейная.
В свою очередь линейные САУ:
свою очередь линейные САУ:
1. обыкновенные САУ 2. особые САУ
Среди особых различают:
1)линейные системы с переменными параметрами это такие САУ, в которых хотя бы одни параметры системы изменяются во времени, например, коэффициент усиления.
2)линейные САУ с распределенными параметрами это такие САУ, динамика которых описывается частными производными.
3
 )
линейные системы запаздывания
это такие САУ, в которых присутствует
звено чистого запаздывания (ЧЗ).
)
линейные системы запаздывания
это такие САУ, в которых присутствует
звено чистого запаздывания (ЧЗ).

4) Дискретные линейные САУ динамика которых описывается линейными уравнениями.
Нелинейные САУ это такие САУ, в которых хотя бы в одном звене статическая характеристика имеет нелинейный характер.
Н
 елинейные
САУ:
елинейные
САУ:
обыкновенные 2)особые: а) с переменными параметрами б) с распределенными параметрами в) с чистым запаздыванием. г) дискретные.