

Перелік питань до екзамену з курсу «Архітектура комп’ютерних систем»
1. Короткий історичний огляд розвитку обчислювальної техніки. Приклади електронних машин. + 3
2. Принцип функціонування механічних машин. Приклади машин. + 4
3. Принципи побудови ЕОМ фон-Неймана. + 4
4. Назвіть основні характеристики ЕОМ різних поколінь. + 5
5. Які існують обмеження на шляху збільшення продуктивності ЕОМ. + 7
6. Поняття про інформацію. Системи числення + 7
7. Як поміряти інформацію? Означення біта. + 9
8. Закони інверсії. +- 9
9. Яка відмінність у термінах ЕОМ і ПК? + 10
10. Що таке тригер і які типи тригерів Ви знаєте? Наведіть приклади побудови тригерів. + 10
11. Яка залежність продуктивності ЕОМ від кількості процесорів? +- 10
12. Назвіть три головні функції алгебри логіки. Подайте алгебричне та графічне представлення. + 11
13. Побудуйте таблицю істинності для стрілки Пірса та елемента Шеффера. + 11
14. Які стани дозволені, а які заборонені у RS-тригері? Обгрунтуйте свої міркування. + 11
15. Шифратори. Наведіть схему шифратора на 4 входи. + 12
16. Для чого використовують шифратори та дешифратори? Наведіть схему дешифратора на 2 входи. + 12
17. Які функції регістрів і які типи регістрів використовують у побудові ЕОМ? + 12
18. Поняття про елементну базу ЕОМ. Лічильники. + 13
19. Побудова лічильника N≠2 n + 13
20. Що таке суматор і які типи суматорів Ви знаєте? + 13
21. Опишіть роботу напівсуматора. + 13
22. У чому полягає суть класифікації за інтегральними ознаками? + 14
23. Класифікація архітектур обчислювальних систем за взаємодією ЦП, ОЗУ, ПП. + 14
24. Як класифікують обчислювальні системи за функціональним призначенням? + 15
25. Приклади масс-процесорних систем. +- 15
26. Класифікація архітектур обчислювальних систем за взаємодією потоку команд і потоку даних. + 15
27. Де найчастіше реалізують тип взаємодії потоку команд і потоку даних ОКБД? +- 16
28. Як класифікують комп’ютери за способом виконання команд? + 16
29. Що таке CISC- архітектура комп’ютерних систем? + 16
30. Що таке RISC- архітектура комп’ютерних систем? + 16
31. Що таке VLIV- архітектура комп’ютерних систем? + 17
32. Що означає термін « системна магістраль» + 17
33. Що таке командний цикл і як він пов'язаний з тактовою частотою - 17
34. Загальні принципи побудови ЕОМ. + 18
35. Якими типами даних оперує мікропроцесор? + 18
36. Як представляють числа з плаваючою комою у ПЕОМ? - 19
37. Назвіть типи і функції шин мікропроцесора. +- 19
38. Які категорії регістрів доступні програмісту у 32-розрядному процесорі? + 19
39. У який спосіб процесор опрацьовує рядки даних? +- 20
40. За якими адресами (молодшими чи старшими) зберігається байт молодшого порядку у подвійному слові? +- 21
41. Що таке переривання і з якою метою їх застосовують? + 21
42. Яка відмінність між перериваннями внутрішніми і зовнішніми? + 21
43. Які переривання називають маскованими, а які немаскованими? + 21
44. Опишіть алгоритм опрацювання маскованих переривань. + 21
45. Опишіть алгоритм опрацювання немаскованих переривань. + 22
46. Опишіть алгоритм роботи мікропроцесора при появі високого рівня на лінії RESET. + 22
47. Що означає увімкнення 14–го біта регістра ознак (вкладення задач) в «1»? +- 22
48. Які типи адресних просторів Ви знаєте? - 22
49. Скільки є типів сегментів оперативної пам’яті і яких? +- 23
50. Назвіть компоненти логічної адреси? +- 23
51. Що називаємо виконавчою адресою? + 24
52. Скільки і які компоненти використовують для формування виконавчої адреси у 16-розрядних процесорах? +- 24
53. Скільки і які компоненти використовують для формування виконавчої адреси у 32-розрядних процесорах? +- 25
54. Які мінімальні та максимальні розміри сторінки і сегмента 32-розрядного процесора? - 25
55. Скільки рівнів захисту має 32-розрядний процесор? +- 25
56. Який розмір віртуальної пам’яті можливий для використання програмістом у 32-розрядному процесорі? + 26
57. Що таке дескриптор? + 26
58. Для чого слугують біти D і P дескриптора? + 26
59. З якою метою у процесорі запроваджено розширення ММХ? + 26
60. У чому полягає суть терміну «арифметика з насиченням» ? + 26
61. Яка відмінність між скалярним і суперскалярним процесором? 26
62. Що означає віртуальний 8086-режим роботи 32-розрядного процесора? + 26
63. Які біти і у яких регістрах відповідають за вмикання сторінкового режиму доступу до пам’яті? +- 27
64. Як працює механізм посторінкової організації пам'яті? 27
65. Чи підтримує 32-розрядний процесор одночасну роботу зі сторінками і сегментами? 27
66. Як влаштована кеш-пам'ять процесора? 27
67. Який тип адреси визначає положення даних у кеш-пам’яті? 27
68. Як працює мехамізм LRU? 27
69. Яка відмінність між прямим та асоціативним типами КЕШ-памяті? 27
70. Як реалізовано набірно-асоціативний тип КЕШ-памяті? 27
71. Як реалізовано трирівневий кеш у процесорах Intel? 27
72. Які головні відмінності між 32 та 16-розрядними мікропроцесорами ? 27
73. Який розмір пам’яті введення/виведення і за допомогою яких команд реалізовано ввід/вивід у процесорах Intel? 27
74. Скільки 8-бітових портів може мати 32-розрядний процесор? 27
75. Скільки 16-бітових портів може мати 32-розрядний процесор? 27
76. З якою метою переривання поділяють за пріоритетами? 27
77. Яка відмінність між перериванням і винятком? + 27
78. Які регістри зберігаються у стеку перед опрацюванням переривання? 28
79. Як можна змінити рівень привілеїв? 28
80. У який спосіб 32-розрядний процесор забезпечує 64 Тбайти пам’яті на задачу? + 28
81. Назвіть головні стадії конвеєра мікропроцесора типу Pentium. + 28
82. У чому полягає суть мікроархітектури NetBurst? + 28
83. Який біт дескриптора і у який стан (0 чи 1) його потрібно задати, щоб дескриптор був системним? + 29
84. Якого розміру сторінка може бути у процесорі Pentium? + 29
85. Назвіть режими адресування 16-розрядного процесора фірми Intel. + 29
86. Назвіть режими адресування 32-розрядного процесора фірми Intel. 30
87. У чому полягає суть архітектури процесора Pentium IV? + 30
88. Які головні відмінності між 32 та 64-розрядними мікропроцесорами? 30
89. Які головні відмінності між CISK та RISC-архітектурою МП? + 30
90. Для чого потрібні регістри TR? + 30
91. Головні характеристики архітектури AMD64. + 31
92. Суть операції No eXecute Bit у процесорах AMD. + 33
93. Адресування у межах «канонічної форми» + 33
94. Режими роботи AMD64. + 33
95. Відмінності між AMD64 і Intel 64. + 34
96. Обмеження операційних систем на архітектури AMD64 та Intel 64. 34
97. Класифікація багатопроцесорних (багатоядерних) систем. + 34
98. Головні характеристики мікропроцесорів на основі мікроархітектури Nehalem. + 35
99. Особливості архітектури Intel Haswell . + 35
100. Особливості архітектури Broadwell + 36
101. Особливості архітектури Skylake + 36
1.Короткий історичний огляд розвитку обчислювальної техніки. Приклади електронних машин. +
А. Механічні машини
Зовсім недавно (1967р.) дослідники знайшли у щоденниках Леонардо да Вінчі (1452-1519) ескіз сумуючої
машини на зубчатих колесах, спроможної додавати 13-розрядні десяткові числа. Спеціалісти IBM відтворили
цей ескіз у металі і машина виявилась працездатною!
Машина Готфріда Вільгельма Лейбніца (1673) – це арифмометр на чотири дії, в основі якого був валик із
зубцями (виконував додавання, множення і ділення 12-розрядних десяткових чисел).
Майже через століття з’явився суматор Є. Якобсона (1770). У Франції в 1799 р. Жозеф Марі Жакар
винайшов ткацький верстат з перфокартами для задання узору — майже через два століття перфокарти масово
використовувались для уведення даних і програм в ЕОМ.
Б. Аналогова техніка
Ера механічних лічильних машин представлена не тільки дискретними механізмами, а й пристроями
безперервної дії (аналоговими). У ХІХ ст. розроблено пристрої для вимірювання довжин (лонгиметри) та площ
(планиметри). Цікавим і дуже важливим винаходом того часу був механічний інтегратор для розв'язування
диференціальних рівнянь до четвертого порядку, який розроблений 1912 р. російським математиком та
інженером О.М.Криловим.
Для моделювання складних задач з підвищеною точністю використовували аналогово-цифрові
обчислювальні системи, побудовані за принципом комбінування у єдиному комплексі аналогової та цифрової
форми зображення даних.
В. Лічильно-перфораційні машини
Появу лічильно-перфораційних машин зумовила потреба опрацювання банківської та статистичної інформації. Заради справедливості необхідно зазначити, що піонером в автоматизації обчислень був відомий англійський учений Чарльз Бебедж, який запропонував ідею побудови обчислювальної машини для табулювання функцій за допомогою методу різниць. Бебедж у 1820 – 22 рр. власноручно виготовив модель такої машини, яка могла табулювати функцію з точністю до восьми знаків.
У 1888 р. американський інженер Герман Голлерит створив табулятор, у якому носієм інформації слугували перфокарти. Отвори на перфокартах пробивалися за допомогою електричного
струму. Головна ідея Голлерита полягала у тому, що різні характеристики відображали отворами (пробивками) у певних місцях перфокарти.
Г. Електронно-обчислювальні машини (ЕОМ)
Створенню першої електронної цифрової машини, безумовно, передувало опублікування 1854 р.
відомим математиком Джорджем Булем теорії алгебри логіки, яку пізніше названо його іменем. Уже
зазначено, що у 1882-83 рр. у Кембриджі Чарльз Бебедж розробив проект аналітичної машини, що
містила такі складові, як арифметичний пристрій, пам’ять на 1000 п'ятидесятизначних десяткових чисел,
програмний пристрій керування (програми готували на перфокартах). Машина обчислювала значення
поліномів другого степеня з точністю до восьми знаків. Програми для машини Бебеджа та коментарі до
неї склала леді Ада Лавлейс, дочка Джорджа Байрона; на честь цієї славної жінки названо одну з мов
програмування – Ада.
У 1937 р. К. Цузе отримав німецький патент Z23139/GMD Nr.005/021 на архітектуру обчислювача з двійковою системою числення. Обчислювач складався з процесора та оперативної пам'яті програм і даних. У 1941 р. була створена машина Z3 (2000 реле), а у 1945 р. — Z4. Роботи К. Цузе були засекречені, про них довілися лише через кілька років після другої світової війни. Усього К. Цузе спроектував сім моделей ЕОМ (Z1, Z2, Z3, Z4, Z5, Z11, Z22). ЕОМ Z11 і Z22 були побудовані на електровакуумних лампах, у 1961 р. під назвою Z23 був реалізований напівпровідниковий варіант Z22.
2.Принцип функціонування механічних машин. Приклади машин. +
Головна ідея механічної обчислювальної машини полягала у тому, що числа відображали за допомогою лічильних коліщаток або валиків з зубцями. Коліщаткам надавали руху за допомогою конічних чи циліндричних зачеплень. Розряд фіксували за допомогою штифтів. Механізм перенесення розрядів працював подібно до того, як у механічному годиннику секундний механізм приводить у дію хвилинний. У 1617 р. Джон Непер розробив дерев’яний арифмометр, однак найвідомішою стала обчислювальна машина Блеза Паскаля (1643-45), у якій йому вдалося розв’язати задачу перенесення десятків. Першу модель Б. Паскаль виготовив ще у 17-річному віці, а всього їх близько 50.
Машина Готфріда Вільгельма Лейбніца (1673) – це арифмометр на чотири дії, в основі якого був валик із
зубцями (виконував додавання, множення і ділення 12-розрядних десяткових чисел).
Майже через століття з’явився суматор Є. Якобсона (1770). У Франції в 1799 р. Жозеф Марі Жакар
винайшов ткацький верстат з перфокартами для задання узору — майже через два століття перфокарти масово
використовувались для уведення даних і програм в ЕОМ.
Епоха арифмометрів тривала досить довго. У 1709 р. Джованні Пелен сконструював колесо зі змінною
кількістю зубців. Більше ніж через 150 років російський службовець В.Т.Однер (1876) удосконалив конструкцію колеса й такі арифмометри (старшому поколінню людей відомі під маркою “Фелікс”) випускали у колишньому СРСР з 1929 до 1978р. на заводах лічильних машин в Курську, Пензі і Москві.
3.Принципи побудови ЕОМ фон-Неймана. +
А. Щодо пристроїв комп’ютера, то він повинен містити:
• арифметико-логічний пристрій, який виконує арифметичні та логічні операції;
• пристрій керування, який організовує процес виконання програм;
• запам’ятовувальний пристрій, або пам’ять для зберігання програм і даних;
• зовнішні пристрої для введення і виведення інформації.
Ці пристрої повинні взаємодіяти між собою.
Б. Щодо принципу функціонування комп’ютера:
• програма розташовується у пам’яті, причому пам’ять повинна бути двох типів – швидка
(оперативна) та повільніша (зовнішня);
• програмне керування виконанням завдань, тобто пристрій керування зчитує вміст комірки пам’яті,
де є перша команда (інструкція), і організовує її виконання;
• наявність умовного переходу, що дає змогу змінювати послідовність виконання команд,
розташованих у пам’яті підряд;
• для відображення інформації необхідно застосовувати двійкову систему числення.
Звичайно, що сучасні комп’ютери дещо відрізняються у побудові від наведених вище вимог.
Наприклад, арифметико-логічний пристрій і пристрій керування об’єднано в один пристрій –
центральний процесор. Крім цього, введено низку додаткових можливостей, зокрема переривання
роботи процесора, паралельне опрацювання інструкцій та ін.
4.Назвіть основні характеристики ЕОМ різних поколінь. +
ЕОМ першого покоління
Початок другого покоління ЕОМ (напівпровідникова елементна база) умовно починається з
вірменської розробки “Раздан-1”, яка з'явилася у промисловій експлуатації 1961 р. Після неї створено
“Минск-2”, “Минск-22”, “Минск-32”, М-220, М-222, БЭСМ-4, Урал-11, -14, -15, -16, “Наири”, “Промінь”,
“Мир-1”, “Мир-2”. Машина "Мир-2" мала вмонтовану мову програмування АНАЛІТИК, що давало змогу
розв’язувати задачі в аналітичному вигляді. Швидкодія цих машин не перевищувала 80 тис. операцій за
секунду (крім ЕОМ "БЭСМ-6") а ємність оперативної пам’яті була в межах 16–32 Кбайти. Завершує ряд
ЕОМ другого покоління БЭСМ-6, яку випуcкали до 1981 р. Її швидкодія була 1 млн. операцій за секунду.
Поряд з цими універсальними машинами розробляли низку ЕОМ для керування технологічними
процесами
Третє покоління ЕОМ – це не тільки нова елементна база для побудови електронних компонент
комп'ютера (інтегральні схеми), а й нова ідеологія, запозичена у фірми ІВМ. З 1972 р. держави – члени
Ради Економічної Взаємодопомоги розпочали продукувати так звану серію ЕС ЕОМ: 1010 – Угорщина,
1020, 1021 – Болгарія, 1030 – Польща, 1040 – НДР, 1050, 1060 і проміжні серії (1022, 1035, 1045, 1061 та
ін.) – СРСР. Передові розробки радянських вчених були перервані після прийняття ЦК КПРС секретної
28постанови про заборону власних розробок універсальних ЕОМ і розробку аналогів лише двох ліній:
Електронно-обчислювальна машина ЕС 1040
1 — процесорна стійка, 2 — пульт оператора, 3 — запам'ятовуючий пристрій на магнітних дисках, 4 — цифрові магнітофони, 5 — пристрій читання інформації із перфострічки.
І покоління — лампові;
ІІ покоління — транзисторні;
ІІІ покоління — на інтегральних схемах низького ступеню інтеграції;
ІV покоління — на інтегральних схемах високого ступеню інтеграції;
V покоління — на інтегральних схемах надвисокого ступеню інтеграції.
Перше покоління (1950–1960)
ЕОМ цього покоління базувались на дискретних елементах і вакуумних лампах, мали великі габарити, масу, потужність, володіючи при цьому малою надійністю. Основна технологія збірки — навісний монтаж. Вони використовувались переважно для вирішення науково-технічних завдань атомної промисловості, реактивної авіації та ракетобудування.
Збільшенню кількості вирішуваних завдань перешкоджали низька надійність і продуктивність, а також надзвичайно трудомісткий процес підготовки, введення та налагодження програми, написаної мовою машинних команд, тобто у формі двійкових кодів. Машини цього покоління мали швидкодію близько 10-20 тисяч операцій в секунду і оперативну пам’ять приблизно 1 кілобайт (1024 слова). У цей же період з'явились перші прості мови для автоматизованого програмування.
Друге покоління (1960–1965)
Як елементна база використовувались дискретні напівпровідникові прилади і мініатюрні дискретні деталі. Основна технологія збірки — одно-та двосторонній друкований монтаж невисокої щільності. У порівнянні з попереднім поколінням значно зменшились габарити і енерговитрати, зросла надійність. Зросли також швидкодія (приблизно 500 тисяч операцій за секунду) і обсяг оперативної пам'яті (16-32Кб). Це відразу розширило коло користувачів, а отже, вирішуваних завдань. З'явились мови високого рівня (Фортран, Алгол, Кобол) і відповідні транслятори. Були розроблені службові програми для автоматизації профілактики і контролю роботи ЕОМ, а також для кращого розподілу ресурсів при вирішенні користувача завдань. (Задача економії часу процесора і оперативної пам'яті залишилась, як і в першому поколінні).
Всі ці перераховані вище службові програми оформились в операційні системи, які спочатку просто автоматизували роботу оператора: введення тексту програми, виклик потрібного транслятора, виклик необхідних бібліотечних програм, розміщення програм в основній пам'яті тощо. Тепер разом із програмами і вихідними даними вводилась інструкція про послідовність обробки програми і необхідні ресурси.
Удосконалення апаратного забезпечення, збудованого на базі напівпровідників, призвело до того, що з'явилася можливість будувати в ЕОМ крім центрального (основного) процесора ще кілька допоміжних. Ці процесори управляли усією периферією, зокрема пристроями введення / виводу, позбавляли від допоміжної роботи центральний процесор. Одночасно вдосконалювались операційні системи. Це дозволило на ЕОМ другого покоління реалізувати режим пакетної обробки програм, а також режим розділеного часу. Останній був необхідний для паралельного рішення кількох завдань управління виробництвом та організації багаторежимної роботи через дисплейні станції. У машинах другого покоління широко використовувалась пам'ять на магнітних осердях на феритових кільцях (так звані куби пам'яті). Все це дозволило підвищити продуктивність ЕОМ і залучити до неї масу нових користувачів.
Третє покоління (1965–1970)
Як елементна база використовувались інтегральні схеми малої інтеграції з десятками активних елементів на кристал, а також гібридні мікросхеми з дискретних елементів. Основна технологія збірки — двосторонній друкований монтаж високої щільності. Це скоротило габарити і потужність, підвищило швидкодію, знизило вартість універсальних (великих) ЕОМ. Але найголовніше — з'явилась можливість створення малогабаритних, надійних, дешевих машин — мініЕОМ. МініЕОМ спочатку призначались для заміни апаратно-реалізованих контролерів у контурах управління різних об'єктів і процесів (зокрема ЕОМ). Поява мініЕОМ скоротила терміни розробки контролерів, оскільки замість розробки складних логічних схем потрібно купити мініЕОМ і запрограмувати її належним чином. Універсальний пристрій володів надмірністю, проте мала ціна і універсальність периферії виявились значною перевагою, що забезпечило високу економічну ефективність.
Але незабаром споживачі виявили, що після невеликого допрацювання на мініЕОМ можна вирішувати і обчислювальні завдання. Простота обслуговування нових машин та їхня низька вартість дозволили забезпечити подібними обчислювальними машинами невеликі колективи дослідників, розробників, навчальних закладів тощо. На початку 70-х років з терміном мініЕОМ вже пов'язували два істотно різні типи обчислювальної техніки:
контролер — універсальний блок обробки даних і видачі керівних сигналів, серійно випускається для використання в різних спеціалізованих системах контролю і управління;
універсальна ЕОМ невеликих габаритів, проблемно-орієнтована користувачем на обмежене коло завдань у рамках однієї лабораторії, технологічного ділянки тощо.
Четверте покоління (з 1970)
Успіхи мікроелектроніки дозволили створити великі (ВІС) і надвеликі інтегральні схеми (НВІС), що містять десятки тисяч активних елементів. Одночасно зменшувались габарити дискретних електронних компонентів. Основною технологією збірки став багатошаровий друкований монтаж. Це дозволило розробити дешевші ЕОМ з великою оперативною пам'яттю. Вартість одного байта пам'яті і однієї машинної операції значно знизилась. Але витрати на програмування майже не скоротились, оскільки на перший план вийшло завдання економії людських, а не машинних ресурсів.
Для цього розроблялись нові операційні системи, що дозволяють користувачеві вести діалог з ЕОМ, що полегшувало роботу користувача і прискорювало розробку програм. Це зажадало, у свою чергу, вдосконалення організації одночасного доступу до ЕОМ кількох користувачів, що працюють з терміналів.
Удосконалення ВІС і НВІС призвело на початку 70-х років до появи нових типів мікросхем — мікропроцесорів (1968 фірма Intel на замовлення Дейта Дженерал розробила і виготовила перші мікропроцесорні БІС, які передбачалось використовувати як складові частини більших процесорів.).
У ті роки мікропроцесором вважалась ВІС, у якій повністю розміщений процесор простої архітектури, тобто Арифметико-логічний пристрій та пристрій обміну. В результаті були створені дешеві мікрокалькулятори та мікроконтролери — керівні пристрої, побудовані на одній або кількох ВІС, що містять процесор, пам'ять і пристрої сполучення з датчиками і виконавчими механізмами. З удосконаленням технології їхнього виробництва і, отже, падінням цін мікроконтролери почали впроваджуватись навіть у побутові прилади і автомашини.
У 70-их роках з'явились перші мікроЕОМ — універсальні обчислювальні системи, що складаються з процесора, пам'яті, схем сполучення з пристроями введення / виводу і тактового генератора, розміщені в одній ВІС (однокристальна мікроЕОМ) або в кількох ВІС, встановлених на одній друкованій платі (одноплатні мікроЕОМ).
Удосконалення технології дозволило виготовити НВІС, що містять сотні тисяч активних елементів, і зробити їх досить дешевими. Це призвело до створення невеликого настільного приладу, в якому розміщувалась мікроЕОМ, клавіатура, монітор, магнітний накопичувач (касетний або дисковий), а також схеми сполучення з малогабаритним друкувальним пристроєм, вимірювальною апаратурою, іншими ЕОМ тощо. Цей прилад отримав назву персональний комп'ютер.
Завдяки ОС, що забезпечує простоту спілкування з цією ЕОМ великих бібліотек прикладних програм, а також низької вартості персональний комп'ютер почав стрімко впроваджуватись у різних сферах людської діяльності в усьому світі. За даними на 1985 рік, загальний обсяг світового виробництва становив 200×106 мікропроцесорів і 10×106 персональних комп'ютерів.
У великих ЕОМ цього покоління спрощується контакт людина-машина. Використання у великих ЕОМ мікропроцесорів і НВІС дозволило значно збільшити обсяг пам'яті і реалізувати деякі функції програм ОС апаратними методами, наприклад апаратні реалізації трансляторів з мов високого рівня тощо. Це значно збільшило продуктивність ЕОМ, хоча і підвищило ціну.
Характерним для великих ЕОМ 4-го покоління є наявність кількох процесорів, орієнтованих на виконання певних операцій, процедур або вирішення певних класів завдань. У рамках цього покоління створюються багатопроцесорні обчислювальні системи зі швидкодією кілька десятків або сотень мільйонів операцій/с і багатопроцесорні керувальні комплекси підвищеної надійності з автоматичною зміною структури.
Прикладом обчислювальної системи 4-го покоління є багатопроцесорний комплекс «Ельбрус-2» з сумарним швидкодією 100×106 оп/с або обчислювальна система ПС-2000, що містить до 64 процесорів, керованих загальним потоком команд. При розпаралелювання обчислювального процесу сумарна швидкість досягає 200×106 оп/с. Подібні суперЕОМ розвивають максимальну продуктивність тільки при вирішенні певних типів завдань (під які вони й будувалися). Це, перш за все, завдання суцільних середовищ, пов'язані з аеродинамічними розрахунками, прогнозами погоди, силовими енергетичними полями тощо. Виробництво суперЕОМ у всьому світі складає нині десятки штук на рік, і будуються вони, зазвичай, «під замовлення».
5.Які існують обмеження на шляху збільшення продуктивності ЕОМ. +
Чому неможливо підвищити продуктивність простим збільшенням тактової частоти? Відповідь на
це питання така: за 1 нс сигнал проходить 300 мм (швидкість світла). Практично 1 м сигнал проходить за
4–5 нс по коаксіальному кабелю або за 7,0–7,5 нс по смужковому провіднику (за 1 нс 130–250 мм). Якщо
окремі інтегральні схеми (ІС) в пристрої будуть віддалені на 1м, то сигнал запізнюватиметься на 1 такт.
Отже, потрібно:
• зменшувати розміри, тобто збільшувати ступінь інтеграції на кристалі;
• компактно розташовувати ІС на платі ;
• виготовляти якомога тонші провідники та зменшувати відстані між ними (багатошарові плати).
Ще один момент – виділення енергії, тобто перегрівання мікросхем, унаслідок чого потрібне
охолодження.
Далі – суперечність між швидкодією логічних схем, арифметико-логічних пристроїв і
можливостями запам’ятовувальних пристроїв .
Є також головна семантична суперечність між мовами програмування високого рівня і кодом
машинних команд.
6.Поняття про інформацію. Системи числення +
Слово інформація походить від лат. informatio, що означає роз'яснення,виклад: обізнаність. Це одне з найзагальніших понять науки. Поняття інформації - одне з головних понять кібернетики (подібно до поняття енергії у фізиці). Розділ науки, присвячений технічним проблема! інформації (окрім семантичних та прагматичних), називають теорією. Інформації. Різні способи зображення інформації, спеціально пристосовані для конкретних випадків, пов'язаних з передаванням, Зберіганням та опрацюванням інформації, розглядає теорія кодування.
Системою числення, або нумерацією, називається сукупність правил і знаків, за допомогою яких можна відобразити (кодувати) будь-яке невід'ємне число. До систем числення висуваються певні вимоги, серед яких найбільш важливими є вимоги однозначного кодування невід'ємних чисел 0, 1,… з деякої їх скінченної множини — діапазону Р за скінченне число кроків і можливості виконання щодо чисел арифметичних і логічних операцій. Крім того, системи числення розв'язують задачу нумерації, тобто ефективного переходу від зображень чисел до номерів, які в даному випадку повинні мати мінімальну кількість цифр. Від вдалого чи невдалого вибору системи числення залежить ефективність розв'язання зазначених задач і її використання на практиці.
Розрізняють два типи систем числення - позиційні та непозиційні.
Загальновживана "арабська" система запису чисел є типовим прикладом позиційної системи числення. Для позиційних систем числення характерним є те, що значення кожної цифри залежить від її положення у числі. Ми використовуємо позиційну систему числення за основою 10 (десяткову систему). Це означає, що наймолодший (крайній справа) розряд цілого числа задає кількість одиниць, наступний - кількість десятків, далі - кількість сотен і т.д. Для комп'ютера більш типовою є двійкова система (за основою 2). Існують непозиційні системи; такою є, наприклад, римська система числення. Формально позиційну систему числення можна визначити так. Нехай зафіксоване ціле число b і 2, яке називається основою системи числення. Будь-яке ціле число M задається у позиційній системі числення за основою b у вигляді послідовності розрядів anan-1…a0, причому всі ai цілі, і 0 ≤ ai ≤ b-1. Значення числа обчислюється на основі цього задання за формулою:
M = a0+ a1b+ a2b2 + … + anbn. Крайній правий розряд зі значенням a0 називається молодшим розрядом, а крайній лівий зі значенням an - старшим розрядом. Число М за основою b позначається як Mb або (M)b. Якщо основа не вказана явно, вважається, що вона дорівнює 10.
Приклади.
709710 =7 + 9*10 + 0*102 + … + 7*103. 1001102 = 0 + 1*2 + 1*22 + 0*23 + 0*24 + 1*25.
Двійкова система числення
Будь-яке число у двійковій системі числення записується у вигляді певної послідовності нулів та одиниць. Додавання однорозрядних двійкових чисел здійснюється за такими правилами: 0+0 = 0; 0+1 = 1+0 =1; 1+1 = 10 (одиниця переноситься в старший розряд). З урахуванням цих правил арифметичні операції над двійковими числами (додавання, віднімання, множення, ділення) здійснюються аналогічно до звичних десяткових операцій. Для прикладу додамо "стовбчиком" двійкові числа 11 і 101: 1 0 1 + 1 1 1 0 0 0 Для самоперевірки виконаємо додавання десяткових еквівалентів. Двійковому числу 11 відповідає десяткове число 3, а двійковому 101 - десяткове 5. Сума 5+3 дорівнює 8, що в двійковій системі числення записується як 1000. Отже, обчислення виконані правильно.Наведемо в загальних рисах правила переведення чисел з двійкової системи до десяткової і навпаки (нагадаємо, що ми розглядаємо лише цілі числа). Алгоритм переведення чисел з двійкової системи до десяткової безпосередньо спирається на визначення позиційної системи числення. Всі розряди домножуються на відповідні ступені двійки (крайній спава - на 1, наступний - на 2 і т.д), після чого отримані добутки додаються за правилами десяткової системи. Приклад. (101011)2 = 1+ 2*1 + 4*0 + 8*1 + 16* 0 + 32*1 = 43. Для спрощення обчислень можна використовувати такий корисний практичний прийом: записати над кожним розрядом його вагу і знайти суму чисел, які стоять над ненульовими розрядами. Проілюструємо цей прийом на цьому ж прикладі: 32 16 8 4 2 1 43 1 0 1 0 1 1 Переведення цілого числа з десяткової системи числення до двійкової здійснюється шляхом його послідовного цілочисельного ділення на 2, поки в частці не вийде 0. Остачі від ділень, якщо їх прочитати справа наліво, утворюють число в двійковій системі (перша остача записується в молодший, тобто крайній справа, розряд, друга - в наступний за ним і т.д).Спробуйте самостійно перевести за наведеним алгоритмом десяткове число 43 до двійкової системи числення.
Двійкове подання чисел є надто громіздким. Так, ми бачили, що для запису десяткового числа 43 потрібно аж 6 двійкових розрядів. Тому в програмуванні і в комп’ютерній літературі широко використовується шістнадцяткова система числення - позиційна система числення за основою 16. Оскільки 16 = 24, переведення чисел з двійкової системи до шістнадцяткової спрощується: одній шістнадцятковій цифрі відповідає чотири двійкових розряди, причому ця відповідність є взаємно однозначною.Десятковим числам від 0 до 9 відповідають такі самі шістнадцяткові цифри. Дворозрядне десяткове число 10 позначається однією шістнадцятковою цифрою зі значенням A, 11 - B, 12 - C, 13 - D, 14 - E, 15 - F.
Приклади.
(25)16 = 5 + 2*16 = 37. (С3)16 = 3 + 12*16 = 3 + 192 = 197.
У непозиційних системах числення величина, яку позначає цифра, не залежить від позиції її у числі. При цьому система може накладати обмеження на позиції цифр, наприклад, щоб вони були розташовані по спаданню, чи згруповані за значенням. Проте це не є принциповою умовою для розуміння записаних такими системами чисел.
Типовим прикладом непозиційної системи числення є римська система числення, в якій у якості цифр використовуються латинські букви.
7.Як поміряти інформацію? Означення біта. +
Вся інформація в пам'яті цифрового комп'ютера зберігається в двійковій формі, тобто у вигляді послідовностей нулів та одиниць. Причина цього полягає в особливостях фізичної реалізації, при якій електронні елементи цифрового комп'ютера можуть перебувати в одному з двох стійких станів: ВИСОКА НАПРУГА - НИЗЬКА НАПРУГА, або Є СТРУМ - НЕМАЄ СТРУМУ тощо. Втім, відомі спроби побудувати цифровий комп'ютер на основі інших систем числення, наприклад, трійкової.
Мінімальною одиницею вимірювання інформації є біт - один двійковий розряд, достатній для того, щоб закодувати одне з двох можливих значень - 0 або 1. Вісім бітів складають один байт; за допомогою одного байту можна закодувати один з 28 = 256 символів.Більш великими одиницями кількості інформації є кілобайт (дорівнює 210=1024 байтам), мегабайт (1024 кілобайт), гігабайт (1024 мегабайт).
Є алфавіт, що містить P букв(символів), x – довжина слова, N – кількість слів.
INCLUDEPICTURE
"http://www5b.wolframalpha.com/Calculate/MSP/MSP8151id330f45c921hg100005gccfc0736526e76?MSPStoreType=image/gif&s=41&w=47.&h=18."
\* MERGEFORMATINET
![]()
INCLUDEPICTURE
"http://www5b.wolframalpha.com/Calculate/MSP/MSP4951f2eci21hbd2fhde0000588a7c710fcgc2gg?MSPStoreType=image/gif&s=23&w=125.&h=20."
\* MERGEFORMATINET
![]()
INCLUDEPICTURE
"http://www5b.wolframalpha.com/Calculate/MSP/MSP37551fggi3392ei03d9g000024fi35398bi8biba?MSPStoreType=image/gif&s=8&w=82.&h=20."
\* MERGEFORMATINET
![]() ,
де x
– довжина
слова, INCLUDEPICTURE
"http://www4a.wolframalpha.com/Calculate/MSP/MSP8392200f692i5e7b991000039ca2ec6a6if2122?MSPStoreType=image/gif&s=59&w=46.&h=20."
\* MERGEFORMATINET
,
де x
– довжина
слова, INCLUDEPICTURE
"http://www4a.wolframalpha.com/Calculate/MSP/MSP8392200f692i5e7b991000039ca2ec6a6if2122?MSPStoreType=image/gif&s=59&w=46.&h=20."
\* MERGEFORMATINET
![]() - вибирає тип алфавіту
- вибирає тип алфавіту
x = 1 =>i = INCLUDEPICTURE "http://www4a.wolframalpha.com/Calculate/MSP/MSP132820c9gh9dgi0f865e0000175ecf78052d3di1?MSPStoreType=image/gif&s=1&w=46.&h=20." \* MERGEFORMATINET
imin=
INCLUDEPICTURE
"http://www4a.wolframalpha.com/Calculate/MSP/MSP5171i2i6h27g1dh351g00003ihg43i9b76ed4e1?MSPStoreType=image/gif&s=53&w=45.&h=20."
\* MERGEFORMATINET
![]()
imin
= 1*
INCLUDEPICTURE
"http://www4a.wolframalpha.com/Calculate/MSP/MSP28251e6ab84764h0i0d600000g419657c58ic57a?MSPStoreType=image/gif&s=41&w=45.&h=20."
\* MERGEFORMATINET
![]() = 1 біт
(binary
digit)
= 1 біт
(binary
digit)
Кількість інформації буде пропорційна довжині слова.
8.Закони інверсії. +-
Логічне заперечення НЕ змінної X є логічна функція Y, яка істинна тільки
тоді, коли X хибна, і навпаки. Інша назва: Інверсія.
Закони інверсії:
INCLUDEPICTURE
"http://vozom.ho.ua/R4/pic/Image68.gif" \* MERGEFORMATINET
![]() ,
INCLUDEPICTURE "http://vozom.ho.ua/R4/pic/Image69.gif" \*
MERGEFORMATINET
,
INCLUDEPICTURE "http://vozom.ho.ua/R4/pic/Image69.gif" \*
MERGEFORMATINET
![]() ;
(правила
де Моргана
)
;
(правила
де Моргана
)
Графічно на схемах позначають кружечком на вході, чи виході Логічного символу (у
системі ЄСКД)
9.Яка відмінність у термінах ЕОМ і ПК? +
ЕОМ - це, мабуть, найпоширеніше поняття до зовсіь недавнього часу. Спочатку воно стосувалося перших електронню автоматичних пристроїв для опрацювання інформації. Однак з часом на ЕОМ почали щораз більше накладати функції інформаційно плану: зберігання, шукання, сортування, опрацювання інформації ( тім числі графічної, текстової, образної (передавання зображень} звукової). Розрізняютьбспеціалізовані ЕОМ; комплекси ЕОМ універсальні ЕОМ; міні-, мікро-ЕОМ.
ОС — обчислювальна система — пристрій, що сприймаінформацію у вигляді даних, які можуть бути зображені уаналоговії або цифровій формі, зберігає дані, опрацьовує їх з великої швидкістю, пересилає дані всередині системи через лінію зв'язку видає результат цих дій як інформацію. (Не треба плутати з поняття» операційна система, що також має скорочене позначення ОС Обчислювальні системи можуть бути:
• аналоговими (безперервної дії);
• цифровими (дискретними);
• гібридними.
Комп'ютер (англ. computer - обчислювач) - спочатку англомовних країнах, а тепер майже всюди, назва електронно обчислювальної машини. Головно слугує для передавання опрацювання і зберігання інформації. Найбільше вживана форм випуску - персональні комп'ютери (ПК).
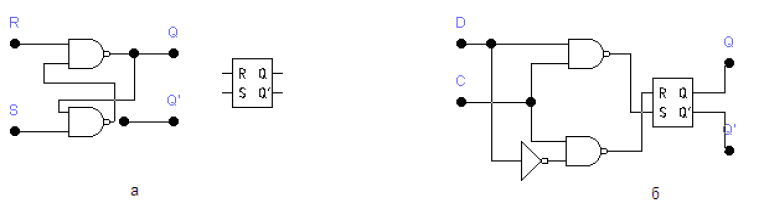
10.Що таке тригер і які типи тригерів Ви знаєте? Наведіть приклади побудови тригерів. +
Головним елементом пам’яті ЕОМ є тригери – логічні пристрої, які мають два стійкі стани. Для перемикання тригерів з одного стану в інший використовують вхідні логічні схеми. За способом перемикання розрізняють такі тригери:
• RS-тригери з роздільним установленням 0 і 1;
• D-тригер із затримкою;
• JK-тригери (універсальні);
• T-тригери (лічильні);
Ці назви походять від перших букв вхідних сигналів: S (set - встановити); R (reset – вимкнути); T (toggle – релаксатор); J (jerk – різко увімкнути); K (kill – різко вимкнути); D (delay – затримка).
Вихідний сигнал тригера прийнято позначати буквою Q.
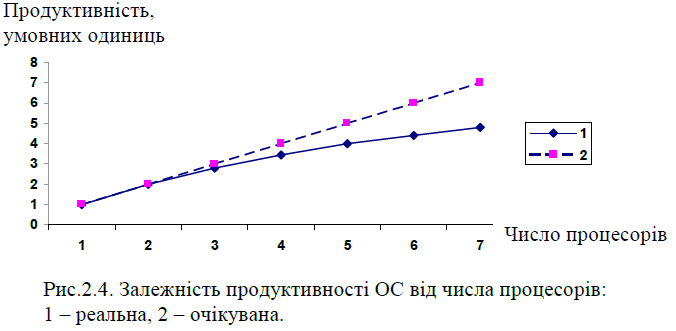
11.Яка залежність продуктивності ЕОМ від кількості процесорів? +-
ЕОМ “Ельбрус” (кількість ЦП від 1 до 10, ПП від 1 до 4, кількість секцій ОП від 1 до 8), яку донедавна використовували тільки для військових потреб, була побудована за принципом збільшення кількості ЦП з однією ОП. Система може працювати за алгоритмом розпаралелювання задачі на кілька процесів або розв’язувати на кожному з них свою задачу Ця система застосована також у Burroughs-700 (США), Iris-80 (Франція) та ін. (рис. 1.18).
Збільшення продуктивності такої системи близьке до лінійного до трипроцесорного варіанта (рис. 1.19). Тому серед ОС високої продуктивності популярні дво- і чотирипроцесорні системи (Сгау-Х-МР; ІВМ “С’єрра” та ін.). Завдяки використанню комплексу додаткових засобів і архітектурних знахідок з опорою на кеш-пам’ять великої потужності вдалося отримати майже лінійне зростання продуктивності зі збільшенням кількості процесорів до п’яти-десяти для широкого класу задач на ОС родини “Ельбрус”
12.Назвіть три головні функції алгебри логіки. Подайте алгебричне та графічне представлення. +
Логічне заперечення. Позначають НЕ.
Означення. Логічним запереченням НЕ змінної X є логічна функція Y, яка істинна тільки тоді, коли X хибна, і навпаки. Інша назва: інверсія. У символах алгебри логіки записують: Y= ¬X . Іноді використовують також позначення Х'. Графічно на схемах позначають кружечком на вході, чи виході логічного символу.
Логічне множення. Позначають І.
Означення. Логічним множенням двох змінних А і В є логічна функція Y, яка істинна тільки тоді, коли одночасно істинні вхідні змінні. Інша назва: кон’юнкція.
Запис: Y = А * В, або Y = А /\ В .
Логічне додавання. Позначають АБО.
Означення. Логічною сумою змінних А і В є логічна функція Y, яка істинна, якщо хоча б одна із вхідних величин істинна. Інша назва: диз’юнкція.
Запис: Y = А + В, або Y = А \/ В .
13.Побудуйте таблицю істинності для стрілки Пірса та елемента Шеффера. +
p |
q |
p|q |
p⬇q |
0 |
0 |
1 |
1 |
0 |
1 |
1 |
0 |
1 |
0 |
1 |
0 |
1 |
1 |
0 |
0 |
14.Які стани дозволені, а які заборонені у RS-тригері? Обгрунтуйте свої міркування. +
Найпростіший запам’ятовувальний елемент має два входи: S і R. У разі комбінації сигналів S=1, R=0 тригер буде встановлений в одиничний стан, тобто Q=1. Якщо ж комбінація вхідних сигналів S=0, R=1, то тригер встановиться в нуль, Q=0. Комбінація S=0, R=0 залишить тригер у попередньому стані, а от комбінація S=1, R=1 буде невизначеною, отже, забороненою для такого елемента (Q=Q =0).
15.Шифратори. Наведіть схему шифратора на 4 входи. +
Шифратор – це вузол ЕОМ, що виконує операцію формування відповідного двійкового коду в разі появи сигналу на одному з входів шифратора. У обчислювальній техніці застосовують переважно багатоімпульсні шифратори, які дозволяють кодувати дані при записуванні програм на носії інформації чи дані, виражені якоюсь фізичною величиною (напр., напругою).
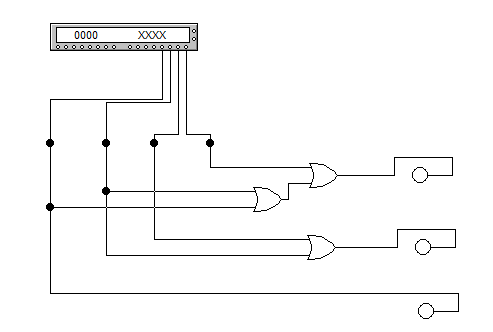
(шифратор просто будувати, якщо намалювати собі таблицю, які "вогники" відповідають вхідним даним. Тут, наприклад, першому індикатору відповідають вхідні 1, 3 і 4. Відповідно, через АБО об'єднуємо вхідні біти).
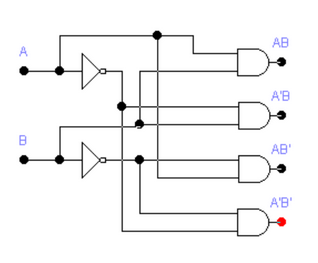
16.Для чого використовують шифратори та дешифратори? Наведіть схему дешифратора на 2 входи. +
[Про шифратори - див. питання 15]. Дешифратор – пристрій який виконує перетворення n-розрядного двійкового коду в однорозрядний з основою р=2n тобто функцію обернену до шифрування. Використовують у багатьох пристроях, зокрема у пристроях керування, для розшифровування коду операції та видавання сигналів керування у ті кола машин, які повинні працювати під час виконання цієї операції; у запам'ятовувальних пристроях для розшифрування адреси чи команди, записування або читання коду з певної комірки пам'яті.
17.Які функції регістрів і які типи регістрів використовують у побудові ЕОМ? +
Регістр – це вузол ЕОМ, який виконує тимчасове збереження та перетворення інформації. Регістри будують на основі тригерних схем. Кількість тригерів визначає розрядність слів, які записують чи зберігають у регістрі. Регістри є послідовні і паралельні, одно- і двотактні, зсувні і перетворювальні.
Регістр є дуже зручним пристроєм для "зсування" інформації праворуч чи ліворуч або перетворення послідовного коду у паралельний.
18.Поняття про елементну базу ЕОМ. Лічильники. +
Лічильник – пристрій, призначений для підрахунку кількості імпульсів. Лічильники бувають підсумовувальні, віднімальні та реверсивні. Реверсиний лічильник залежно від перекомутації може бути підсумовувальним або віднімальним. Будують лічильники на основі тригерів, використовують у пристроях керування та в арифметичних пристроях для рахунку номерів команд, кількості циклів програми, кількості тактів у разі множення і ділення, а також як суматори.
Лічильники, які однаково можна використовувати як для додавання, так і для віднімання імпульсів, називають реверсивними.
19.Побудова лічильника N≠2 n +
Іноді потрібно отримати значення N≠2 n . Тоді будують спеціальні перерахункові схеми, де від певних розрядів уводять обернений зв'язок. Перерахункові схеми з N=10 називають декадними лічильниками, які застосовують для побудови десяткових лічильників. На схемі елемент D «диференціює» вихідний сигнал тригера, тобто перетворює перепад логічних рівнів у імпульс.
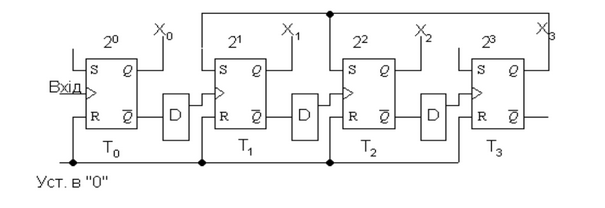
У разі подання перших семи імпульсів схема працює у звичайному режимі. Восьмий імпульс установить тригери Т0, Т1 і Т2 в стан "0", а тригер Т3 – у стан "1". У цьому випадку внаслідок оберненого зв'язку сигнал перенесення з Т3 встановить в одиничний стан Т1 і Т2: отримаємо стан лічильника 1110. Дев'ятий імпульс установить в "1" Т0, а десятий скине в "0" усі тригери схеми. Після цього схема знову готова рахувати до 10.
20.Що таке суматор і які типи суматорів Ви знаєте? +
Суматор – пристрій, що виконує сумування чисел на підставі правил порозрядного додавання з урахуванням
переносів, які спрямовують у старші розряди.
Суматори класифікують:
1. за виглядом елементів, які використовують – комбінаційного та накопичувального типів;
2. за способом уведення-виведення чисел – паралельної та послідовної дії;
3. за способом зображення чисел – двійкові та десяткові;
4. за способом організації перенесення – з послідовним та наскрізним перенесенням.
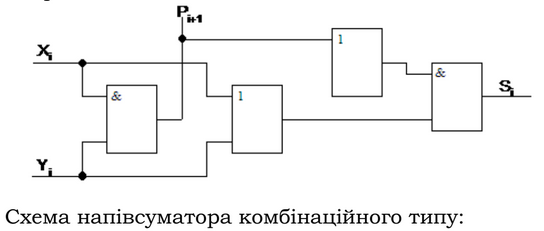
21.Опишіть роботу напівсуматора. +
Розглянемо роботу напівсуматора, яку описують логічними виразами для суми:
Si = XiY’i + X’iYi = XiY’i + X’iYi + XiX’i + YiY’i = =Xi(X’i+Y’i) + Yi(X’i+Y’i) = (X’i+Y’i)(Xi+Yi) = XiYi(Xi+Yi)
та перенесення:
Pi+1 = XiYi .
Результат для суми отримано внаслідок певних алгебричних перетворень.
22.У чому полягає суть класифікації за інтегральними ознаками? +
Доцільно скористатися поняттям архітектури ЕОМ як певним набором інтегральних характеристик, а саме: сукупність властивостей і характеристик, що визначають інформаційні зв'язки між ЦП, периферійними процесорами (ПП), ОП, зовнішньою пам'яттю і периферією; взаємодією і структурою потоків команд та потоків даних.
Перша характеристика дає змогу врахувати такі особливості ЕОМ третього і четвертого поколінь, як багатопроцесорність, моношинна структура зв'язків, швидкодія, розподілена пам'ять.
23.Класифікація архітектур обчислювальних систем за взаємодією ЦП, ОЗУ, ПП. +
Розглянемо інформаційні зв'язки між трьома головними типами пристроїв ЕОМ, обмежившись лише структурними зв'язками в архітектурі ОС. Є такі структури:
однопроцесорна (з одним ЦП і периферійним процесором чи каналом) зі зв'язком через ЦП;
з одним потужним ЦП і кількома периферійними процесорами, що його обслуговують;
багатопроцесорна (кілька ЦП, ПП і секціонована ОП);
з магістральною шиною;
мережна;
функціонально переналагоджувальна багатопроцесорна;
мас-процесорна (дуже значна кількість процесорів).
В однопроцесорній структурі ЦП (спільно з операційною системою) координує всю роботу системи. Потрібні прямі зв'язки з периферійними пристроями ЦП виконує через канали або ПП.
Однак для продуктивніших систем такі структури, коли в разі кожного звертання необхідно переривати роботу ЦП, не вигідні. Тому виникла ідея поєднати роботу потужного ЦП із кількома менш потужнішими, функція яких полягає у обслуговуванні переривань від зовнішніх пристроїв, а також ОЗП. Наприклад, це може бути структура з концентричним розташуванням периферійних процесорів. Подібну структуру мають високопродуктивні системи CDC.
А от ЕОМ "Ельбрус" (кількість ЦП від 1 до 10, ПП від 1 до 4, кількість секцій ОП від 1 до 8), яку донедавна використовували тільки для військових цілей, була побудована за принципом збільшення кількості ЦП з однією ОП. Система може працювати за алгоритмом розпаралелювання задачі на кілька процесів або розв'язувати на кожному з них свою задачу. Ця система застосована також у Burroughs-700 (США), Iris-80 (Франція) та ін. Збільшення продуктивності такої системи близьке до лінійного до трипроцесорного варіанта. Тому серед ОС високої продуктивності популярні дво- і чотирипроцесорні системи (Cray-XMP; IBM "Сьєрра" та ін.). Завдяки використанню комплексу додаткових засобів і архітектурних знахідок з опорою на кеш-пам'ять великої потужності вдалося отримати майже лінійне зростання продуктивності зі збільшенням кількості процесорів до п'яти-десяти для широкого класу задач на ОС родини "Ельбрус".
Нові можливості відкриваються для паралельних ОС, якщо звернутися до різного типу сіткових алгоритмів. Такими алгоритмами розв'язують багато задач неперервного середовища, що їхописують системи рівнянь у частинних похідних, лінійні системи алгебричних рівнянь. Процесори, які опрацьовують інформацію та обмінюються інформацією між собою, розміщені у вузлах решітки або сітки. Таких процесорів у ОС міститься вже декілька сотень або навіть тисяч. Основою ОС стають мікропроцесори. На відміну від багатопроцесорних систем з великими універсальними процесорами, такі системи називають мас-процесорними. Операції розподіляють за окремими функціональними пристроями, які працюють паралельно, проте в самих функціональних пристроях застосована конвеєризація, а також відбувається попередній перегляд програм, а їхньому швидкому попередньому і паралельному виклику з ОП допомагає глибоке розшарування пам'яті.
Магістрально-шинна структура передбачає, що всі частини ОС можуть бути приєднаними до однієї багатопровідної шини (або коаксіального чи оптоволоконного кабелю), захоплюючи її на короткий період машинного такту для обміну інформацією (рис. 2. 5). Конфліктну ситуацію вирішує арбітр шини. Розрізняють шину адреси, шину даних та шину керування.
Окремий напрям становить мережна архітектура ОС. Розрізняють глобальні, регіональні та локальні комп'ютерні мережі. Вони мають свою топологію і їхня робота регламентована певним набором правил (протоколів).
24.Як класифікують обчислювальні системи за функціональним призначенням? +
Як уже зазначено, сучасні обчислювальні системи умовно поділяють на аналогові, дискретні та гібридні. Кожна з цих груп має ще свій внутрішній поділ, який виглядає приблизно так:
ЕОМ поділяються на:
-------аналогові
-спеціальні
-загального призначення
-персональні
-------цифрові
-спеціальні
-МікроЕОМ (ПК)
-МініЕОМ
-загального призначення
-СуперЕОМ
-------гібридні
-спеціальні
-загального призначення
-персональні
-нетрадиційної архітектури
25.Приклади масс-процесорних систем. +-
Розрізняють такі мас-процесорні ОС:
багатопроцесорні скалярні (ІВМ 3090/200, ЕС 1065);
векторні і векторно-конвеєрні ( CDC 6600, Сray -1);
мас - процесорні з динамічною архітектурою;
спеціальні процесорні.
26.Класифікація архітектур обчислювальних систем за взаємодією потоку команд і потоку даних. +
Розглянемо дещо іншу класифікацію, яка властива головно суперЕОМ. Відомо, що у ЕОМ з класичною архітектурою опрацювання даних є послідовним. Команди надходять одна за одною, а для них з ОП чи з регістрів так само послідовно надходять операнди. Одній команді відповідає один необхідний для неї набір операндів; для бінарних операцій, як звичайно – два набори. Скорочено такий тип архітектури називають ОКОД (одна команда – одні дані); англійська абревіатура SISD (Single Instruction, Single Data).
Для спеціальних процесорів, що опрацьовують зображеня, або асоціативних процесорів опрацьовується набір з множини даних. Це тип ОКБД (одна команда – багато даних); англійська абревіатура SIMD (Single Instruction, Multiple Data). Кількість елементів, що опрацьовуються, може бути дуже великою (тисячі), проте їх опрацювання відбувається синхронно (приклад: сучасні процесори з технологією ММХ).
Прикладом типу БКОД (багато команд – одні дані) може бути конвеєр, тобто послідовне опрацювання одного потоку даних багатьма опрацьовувальними ступенями конвеєра. Тип БКБД (багато команд – багато даних) передбачає найповніше і незалежне розпаралелювання процесу.
27.Де найчастіше реалізують тип взаємодії потоку команд і потоку даних ОКБД? +-
Для спеціальних процесорів, що опрацьовують зображеня, або асоціативних процесорів опрацьовується набір з множини даних. Це тип ОКБД (одна команда – багато даних); англійська абревіатура SIMD (Single Instruction, Multiple Data). Кількість елементів, що опрацьовуються, може бути дуже великою (тисячі), проте їх опрацювання відбувається синхронно (приклад: сучасні процесори з технологією ММХ).
28.Як класифікують комп’ютери за способом виконання команд? +
Мікропроцесори з архітектурою CISC (Complete Instruction Set Computer), RISC (Reduced Instruction Set Computer), MIPS(Microprocessor without Interlocked Pipeline Stages, належить до сімейства RISC-процесорів), VLIW(very long instruction word), MISC(Minimise Instruction Set Computer).
29.Що таке CISC- архітектура комп’ютерних систем? +
CISС (Complete Instruction Set Computer) — ЕОМ з повним набором інструкцій (команд), які виконує мікропроцесор. До цього типу належить сімейство ПЕОМ на базі мікропроцесорів х86. Внаслідок широкого набору команд архітектура таких процесорів страждає від надміру апаратних ресурсів, склад і призначення регістрів досить неоднорідні. На виконання команд необхідно затрачати значний час, причому час виконання різних команд не однаковий (різна кількість машинних тактів). Ці фактори негативно впливають на продуктивність ПЕОМ, тому починаючи з МП Intel486 застосовують комбіновану архітектуру, а саме у CISC-процесор вкраплюють RISC-ядро.
30.Що таке RISC- архітектура комп’ютерних систем? +
Мікропроцесори з архітектурою RISC (Reduced Instruction Set Computer) використовують порівняно невеликий (скорочений) набір найуживаніших команд. Цей набір визначено внаслідок статистичного аналізу значної кількості програм для головних галузей застосування CISC-процесорів. Особливістю RISC-архітектури є те, що всі команди мають однаковий формат, працюють з операндами, які розташовані у регістрах процесора. Звертання до пам'яті виконується за допомогою спеціальних команд завантаження регістра і запису.
Невеликий набір команд і простота їхньої структури дають змогу реалізувати повністю апаратне виконання й ефективний конвеєр з порівняно незначним об'ємом обладнання. Завдяки цьому команди виконуються в 2-4 рази швидше, ніж у звичайних CISC з тою ж тактовою частотою. Продуктивність такого процесора на 30% більша ніж звичайного. Перші експериментальні МП (RISC II, MIPS, IBM 801) з’явилися ще у 1980-81 рр. Мікропроцесорну революцію продовжили провідні фірми у 1985-86 рр. (Acorn, AMD, IBM, Sun Microsystems). Сьогодні RISC-процесори здебільшого використовують для побудови співпроцесорів та спецпроцесорів, інтелектуальних контролерів, багатопроцесорних систем та ін. До сімейства RISC-процесорів належить також архітектура MIPS (англ. Microprocessor without Interlocked Pipeline Stages — мікропроцесор без блокувань в конвеєрі), яку розробляє компанія MIPS Technologies. Архітектуру MIPS використовують у комп’ютерах SGI, в ігрових консолях Nintendo 64, Sony PlayStation, Sony PlayStation 2 і Sony PSP та вмонтованих системах.
Головна ідея MIPS-архітектури полягає у використанні простих команд (не передбачається апаратна підтримка операцій множення і ділення), що забезпечує високу швидкість їх виконання (висока тактова частота). Це значно спрощує будову процесора і дає змогу уникати блокувань конвеєра. На сьогодні MIPS використовують у вмонтовуваних пристроях з критичною продуктивністю.
31.Що таке VLIV- архітектура комп’ютерних систем? +
В деяких серверних процесорах та графічних процесорах (англ. GPU -Graphical Processor Unit) використовують архітектуру VLIW (англ. very long instruction word — «дуже довга машинна команда») — архітектуру процесорів з декількома обчислювальними пристроями. Одна інструкція VLIW-процесора містить декілька операцій, які повинні виконуватись паралельно. В суперскалярних процесорах також є декілька обчислювальних модулів, але завдання розподілу між ними роботи розв’язується апаратно. Це дуже ускладнює дизайн процесора і може призвести до помилок. У VLIW-процесорах завдання розподілу виконується під час компіляції і в інструкціях явно вказано, який обчислювальний пристрій має виконувати яку команду.
VLIW можна вважати логічним продовженням ідеології RISC, яке поширює її на архітектури з декількома обчислювальними модулями.
Як і в RISC, в інструкції явно вказується, що саме має робити кожний модуль процесора. Через це довжина інструкції може досягати 128 або ж 256 біт.
переваги Підхід VLIW значно спрощує архітектуру процесора за рахунок розподілу обчислювальних пристроїв компілятором.
Оскільки з процесора видалено великі і складні вузли, які виконували розподіл обчислювальних пристроїв, значно зменшується енергоспоживання;
недоліки Через велику кількість порожніх інструкцій для невикористовуваних пристроїв програми для VLIW-процесорів можуть бути значно довшими, ніж аналогічні програми для традиційних архітектур.
Реалізації VLIW-процесорів:
1. Мікропроцесор Intel Itanium має 64-бітну систему команд «з явним паралелізмом» (англ. explicitly parallel instruction computing, EPIC), яка є одним із варіантів VLIW;
2. Процесори фірми Tilera також мають VLIW-архітектуру;
3. Графічні процесори AMD/ATI Radeon, починаючи з R600, мають VLIW-архітектуру.
32.Що означає термін « системна магістраль» +
Системна шина(магістраль) – це основна магістраль, по якій відбувається обмін інформацією між процесором та всіма решта пристроями. Системна шина складається з 3 шин:
Адресна шина.
Шина даних.
Командна шина.
Адресна шина
По адресній шині пересилаються адреси комірок оперативної пам’яті, з яких процесор вибирає команди та дані для цих команд. В сучасних комп’ютерах адресна шина є 32-розрядною, тобто складається з 32 провідників.
Шина даних
По шині даних відбувається пересилка власне даних з оперативної пам’яті до регістрів процесора і навпаки. В сучасних комп’ютерах шина даних є 64-розрядною.
Командна шина
По командній шині до процесора надходять команди, від нього керуючі команди до оперативної пам’яті або до пристроїв вводу/виводу. Командна шина визначає розрядність процесора і для сучасних комп’ютерів є 64-розрядною.
Шини на материнській платі використовуються не лише для зв’язку внутрішніх пристроїв з процесором. Вони також взаємодіють з пристроями, що під’єднуються до материнської плати або через внутрішні роз’єми – слоти, або через зовнішні роз’єми – порти за схемою.