

1. Типовые нагрузки механической части электропривода: моменты и силы упругого взаимодействия.
Входным воздействием на механическую часть ЭП явл. момент на двигателе, все остальные моменты и силы действующие в системе составляют нагрузки: статические и динамические.
 , где Мпол(Fпо
л) – учитываются приведенные скорости,
∆Мтр - Момент потерь
, где Мпол(Fпо
л) – учитываются приведенные скорости,
∆Мтр - Момент потерь
Статические нагрузки |
|
Активные силы и моменты, создаваемые внешними по отношению к двигателю источниками механической энергии |
Реактивные силы и моменты, нагрузки возникающие, как реакция на активное движение ( по природе реактивные нагрузки обусловлены силами трения) |
Длэ ЭП важно как зависит полезная нагрузка от скорости. Мс = А(ω) – механическая характеристика рабочей машины( механизма).
Мс = Мс0 + (Мном – Мс0) * (ω/ ωном)2
Типовые нагрузки ЭП:
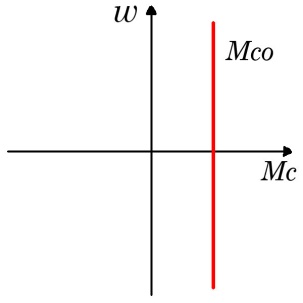
1)Активная( потенциальная) крановая нагрузка. α = 0, Мс = const, sign Мс ≠ sign ω (не зависит от величины и знака скорости)
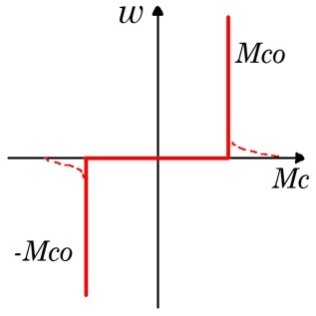
2)Сухое трение. α = 0, Мс = const, Мс = f(sign ω)
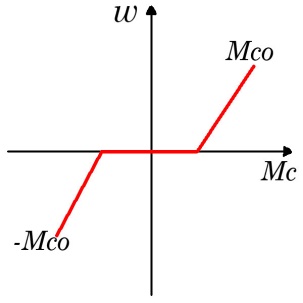
3) Вязкое трение, линейно зависит от скорости. α = 0, Мс = ω.
Мс = Мсо + βвт* ω
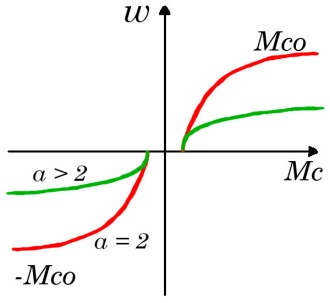
4) Реактивная вентиляторная нагрузка, α = 2, α > 2
Мс = Мсо + K* ω2
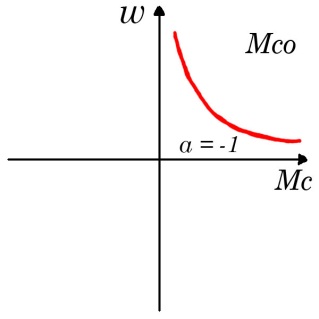
5) Мешалка. α = -1
Мс = Мсо + K/ω
2) 3) 4) 5)
2. Составление расчетных механических схем. Приведение нагрузок к расчетной скорости.
При проектировании и исследовании электроприводов моменты инерции, массы, жесткости связей реальных элементов обычно бывают известны, а действующие в системе силы либо заданы, либо рассчитываются по исходным данным механизма и условиям его технологии. После приведения их значений к расчетной скорости представляется возможным, сопоставив приведенные значения моментов инерции и жесткостей, осуществить выбор главных масс и главных упругих связей и на этой основе составить приближенную расчетную схему механической части. Для большей наглядности сопоставления по результатам приведения можно построить исходную приведенную расчетную схему, представив в ней массы в виде прямоугольников, площадь которых пропорциональна приведенным моментам инерции, а жесткости связей между ними в виде соединений, длина которых обратно пропорциональна жесткости (прямо пропорциональна податливости связей).
Для составления расчетных схем механической части электропривода необходимо приведение всех параметров элементов кинематической цепи к одной расчетной скорости. Ji (момент инерции), mi, ci (жесткость связи вращ.), cj (жесткость связи поступат.) – приводят к одной расчетной системе, как правило выбирают 1-ый элемент цепи ( двигатель) w1 = wдв. При приведении необходимо обеспечить сохранение закона энергии.
Вращательное |
поступательное |
i1i = w1/wi |
p1j = vj/w1 |
Mпрi = Mi/ i1i |
Mпр j = F j* p1j |
Эти формулы без учёта потерь в передаче, а потери энергии в передачах учитываются в КПД.
Mпрi = Mi/( i1i* ηmax) |
Mпр j = F j* p1j/ ηmax |
Пример: от двигателя к рабочему органу (кран поднимает груз)
Mпрi = Mi/ i1i* ηmax |
Mпр j = F j* p1j* ηmax |
Пример: Кран опускает груз |
|