

Министерство образования и науки Российской Федерации
Федеральное агентство по образованию
Саратовский государственный технический университет
Исследование и настройка цифровых ПИД-регуляторов
Методические указания
к выполнению лабораторной работы
по курсам «Контроль и автоматизация обработки КПЭ»,
«Управление в биологических и медицинских системах»
для студентов специальностей 120700, 190500
Одобрено
редакционно-издательским советом
Саратовского государственного
технического университета
Саратов 2006
Цель работы: закрепление теоретических знаний по разделу «Цифровые устройства управления».
Теоретическая часть
Любая автоматическая система регулирования (АСР) состоит из управляемого объекта и автоматического управляющего устройства (регулятора). Автоматические регуляторы поддерживают неизменными или определенным образом изменяют какие-либо физические величины в технических устройствах или технологическом процессе. Регуляторы могут быть пропорциональные (П-регуляторы), интегральные (И-регуляторы), пропорпионально-интегральные (ПИ-регуляторы), пропорционально-дифференциальные (ПД-регуляторы), пропорционально-интегрально-дифференциальные (ПИД-регуляторы).
П-регуляторы имеют следующий закон регулирования:
y = KрX, (1)
где у – выходная величина регулятора; X – входная величина (отклонение регулируемой величины от заданной ); Kр – коэффициент передачи регулятора.
Настройка П-регулятора заключается в изменении величины Kр.
И-регуляторы имеют следующий закон регулирования:
![]() , (2)
, (2)
где
![]() –
коэффициент передачи регулятора,
характеризующий скорость срабатывания
его исполнительного устройства при
данном отклонении x.
–
коэффициент передачи регулятора,
характеризующий скорость срабатывания
его исполнительного устройства при
данном отклонении x.
ПИ-регулятор имеет закон регулирования, совмещающий закон для П- и И-регуляторов:
![]() , (3)
, (3)
где Tи – постоянная времени интегрирования или так называемое время изодрома.
Настройка регулятора этого типа заключается в изменении коэффициента передачи Kp и времени изодрома Tи.
ПИД-регулятор имеет закон регулирования, совмещающий закон ПИ-регуляторов с воздействием по первой производной (воздействие с предварением):
![]() , (4)
, (4)
где
![]() ,
,![]() – коэффициенты передачи регулятора с
учетом предварения (опрежения); Тд
–
время предварения:
– коэффициенты передачи регулятора с
учетом предварения (опрежения); Тд
–
время предварения:
![]() .
.
Настройка регулятора данного типа заключается в изменении коэффициента передачи Kр, времени изодрома Ти и времени предварения Тд.
При разработке АСР необходимо знать характеристики объекта управления.
Для реализации П-, ПИ- или ПИД-закона регулирования вычислительные операции могут выполняться как непрерывно, так и в дискретные моменты времени. В первом случае регулятор называют непрерывным, во втором – дискретным. В отличие от непрерывных дискретные регуляторы обеспечивают изменение регулирующего воздействия только в определенные моменты времени. Между этими моментами регулирующее воздействие остается постоянным. Если интервал времени между соседними изменениями регулирующего воздействия (такт квантования) выбрать очень малым (стремящимся к нулю), то такой регулятор часто называют непрерывным, несмотря на дискретный способ его реализации, поскольку статические и динамические характеристики системы с таким регулятором и области устойчивости практически полностью совпадают с аналогичными характеристиками системы с непрерывным регулятором. В том случае, когда дискретный регулятор реализуют на базе цифровой вычислительной техники (обычно на базе микроЭВМ), его называют цифровым регулятором. Один цифровой регулятор, как правило, может выполнять функции нескольких аналоговых регуляторов. При программной реализации закона управления легко корректируются структура и параметры регулятора как в предпусковой период, так и в процессе его эксплуатации.
Структурная схема одноконтурной цифровой автоматической системы регулирования приведена на рис. 1. Регулирующее воздействие хр.д.(kT0), k = 0, 1, 2, … вычисляется по запрограммированному в ЭВМ алгоритму, входными величинами для которого являются дискретные значения задающего сигнала xзд(kT0) и регулируемой переменной x(kT0). Поскольку в настоящее время в основном применяются датчики, усилители и линии связи аналогового типа, на входе цифрового регулятора необходим аналого-цифровой преобразователь. Для того чтобы цифровой регулятор мог приводить в действие исполнительное устройство с аналоговым входом, он должен быть снабжен цифроаналоговым преобразователем, на входе которого имеется фиксатор (экстраполятор нулевого порядка), сохраняющий значение управляющей переменной хр.д. в промежутках между моментами квантования. Преобразование последовательности импульсов хр.д. на входе экстраполятора нулевого порядка в ступенчатый сигнал хрэ описывается передаточной функцией
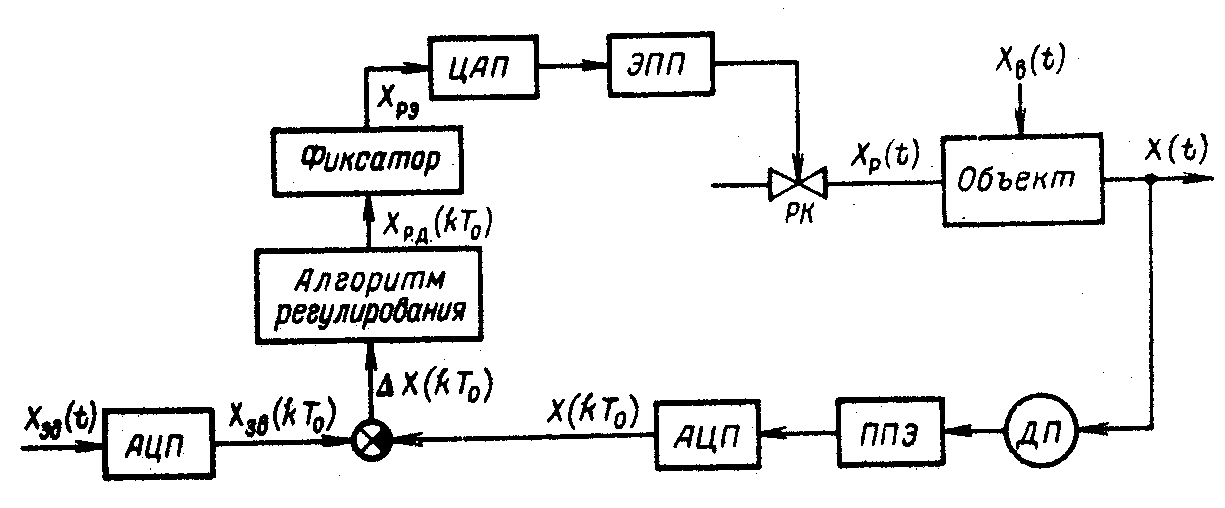
Рис. 1. Структурная схема одноконтурной цифровой АСР:
ДП – датчик с пневмовыходом; ППЭ – пневмоэлектрический преобразователь; АЦП – аналого-цифровой преобразователь; ЦАП – цифроаналоговый преобразователь; ЭПП – электропневматический преобразователь; РК – регулирующий клапан
![]() ,
(5)
,
(5)
где T0 – период квантования; р – изображение по Лапласу.