

Національний аерокосмічний університет імені М. Є. Жуковського ”ХАІ”
Кафедри “Теоретичної механіки , машинознавства і робото механічних” систем
КУРСОВИЙ ПРОЕКТ
з «Теорії технічних систем”
на тему: «Синтез послідовних та паралельних коригуючих пристроїв лінійних САУ»
Студента 2 курсу 229-а групи
напряму підготовки “Прикладна механіка”
Шарошкіна Р.Д.
Керівник ___________________________
____________________________________
(посада, вчене звання, науковий ступінь, прізвище та ініціали)
Національна шкала ________________
Кількість балів: __________Оцінка: ECTS _____
Члени комісії ________________ ___________________________
(підпис) (прізвище та ініціали)
________________ ___________________________
(підпис) (прізвище та ініціали)
________________ ___________________________
(підпис) (прізвище та ініціали
м. Харків 2014рік
Оглавление
Задание 3
Ведение 5
1. Предварительный анализ САУ, добротность системы 8
1-ый этап: 8
2-ой этап: 10
2. Синтез последовательных и параллельных корректирующих устройств линейных САУ 12
4.1 Построение рабочей точки Ар 13
4.2 Построение 1-й низкочастотной асимптоты 13
4.3 Нахождение частоты среза 13
4.4 Построение среднечастотной асимптоты 14
4.5 Построение ЛАЧХ неизменяемой части САУ Lm|Wн(jω)| 14
4.6 Построение желаемой ЛАЧХ 15
3. Расчет параметров корректирующих устройств 16
4. Сопряжение желаемой ЛАЧХ с ЛАЧХ неизменяемой части САУ 18
5. Определение запасов устойчивости по фазе и амплитуде синтезированной системы 19
6. Проверка устойчивости внутреннего контура 19
7. Проверка расчетов путем моделирования САУ с помощью пакета MatLab 20
8. Анализ результатов выполнения домашнего задания 23
9. Самостоятельное исследование модели САУ 23
Библиографический список: 28
Задание
Задание состоит из двух этапов, а каждый этап состоит из двух частей. На первом этапе строятся ЛАЧХ и ЛФЧХ неизменяемой части САУ. Вначале вручную строятся приближенные асимптотические характеристики, затем с помощью пакета «MatLab» строятся точные характеристики, проводится их сравнение, определяются частоты, на которых ЛАЧХ и ЛЧФХ совпадают в наибольшей степени и частоты с наибольшими различиями.
Таблица 1- Исходные данные для 1-ой части 1-го этапа
№ варианта |
|
|
|
|
22 |
0.12 |
0.0045 |
0.017 |
0.8 |
 ,
с.
,
с. ,
с.
,
с. ,
с.
,
с.
Таблица 2 - Исходные данные для 2-ой части 1-го этапа
№ варианта |
, с. |
, с. |
|
|
|
|
30 |
0.0045 |
0.017 |
0.8 |
0.81 |
0.27 |
0.026 |
 ,
с.
,
с. ,
с.
,
с. ,
с.
,
с.
На втором этапе строятся «желаемые» ЛАЧХ и ЛФЧХ САУ, т.е. характеристики при которых САУ работает заведомо устойчиво с хорошими показателями качества. Также вначале строятся приближенные асимптотические характеристики, а затем с помощью пакета «MatLab» строятся точные характеристики той же САУ. Проводится анализ сходства и различий этих характеристик.
Таблица 3 - Исходные данные для 1-ой части 2-го этапа
№ варианта |
, с. |
|
|
|
22 |
0.1 |
0.001 |
0.015 |
0.6 |
 ,
с.
,
с. ,
с.
,
с.
Таблица 4 - Исходные данные для 2-ой части 2-го этапа
№ варианта |
град/с |
град/с2 |
град. |
с. |
% |
22 |
30 |
40 |
0.3 |
0.6 |
30 |





Ведение
Автоматическое управление в технике, совокупность действий, направленных на поддержание или улучшение функционирования управляемого объекта без непосредственного участия человека в соответствии с заданной целью управления. А. у. широко применяется во многих технических и биотехнических системах для выполнения операций, не осуществимых человеком в связи с необходимостью переработки большого количества информации в ограниченное время, для повышения производительности труда, качества и точности регулирования, освобождения человека от управления системами, функционирующими в условиях относительной недоступности или опасных для здоровья. Цель управления тем или иным образом связывается с изменением во времени регулируемой (управляемой) величины — выходной величины управляемого объекта. Для осуществления цели управления, с учётом особенностей управляемых объектов различной природы и специфики отдельных классов систем, организуется воздействие на управляющие органы объекта — управляющее воздействие. Оно предназначено также для компенсации эффекта внешних возмущающих воздействий, стремящихся нарушить требуемое поведение регулируемой величины. Управляющее воздействие вырабатывается устройством управления (УУ). Совокупность взаимодействующих управляющего устройства и управляемого объекта образует систему автоматического управления. Система автоматического управления (САУ) поддерживает или улучшает функционирование управляемого объекта. В ряде случаев вспомогательные для САУ операции (пуск, остановка, контроль, наладка и т.д.) также могут быть автоматизированы. САУ функционирует в основном в составе производственного или какого-либо другого комплекса.
История техники насчитывает много ранних примеров конструкций, обладающих всеми отличительными чертами САУ (регулирование потока зерна на мельнице с т. н. «потряском», уровня воды в паровом котле машины Ползунова, 1765, и т. д.). Первой замкнутой САУ, получившей широкое техническое применение, была система автоматического регулирования с центробежным регулятором в паровой машине Уатта (1784). По мере совершенствования паровых машин, турбин и двигателей внутреннего сгорания всё более широко использовались различные механические регулирующие системы и устройства, достигшие значительного развития в конце 19 — начале 20 вв. Новый этап в А. у. характеризуется внедрением в системы регулирования и управления электронных элементов и устройств автоматики и телемеханики. Это обусловило появление высокоточных систем слежения и наведения, телеуправления и телеизмерения, системы автоматического контроля и коррекции. 50-е гг. 20 в. ознаменовались появлением сложных систем управления производственными процессами и промышленными комплексами на базе электронных управляющих вычислительных машин.
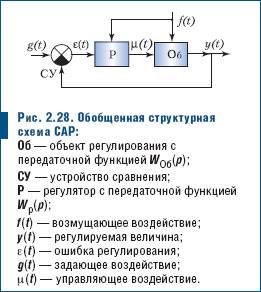
Рисунок 1 - Обобщенная структурная схема САР
В нашем случаи в состав САУ входят следующие основные элементы: неизменяемая часть (силовой усилитель, двигатель, редуктор, элементы исполнительной системы), корректирующие устройства (последовательные и параллельные), главная отрицательная обратная связь и устройство сравнения. Неизменяемая часть САУ выбирается при энергетическом расчете. Она должна обеспечивать заданную скорость и ускорение нагрузки заданной массы: слабый двигатель не сможет перемещать массивную нагрузку с заданной скоростью, обеспечивать необходимое ускорение. Слабый усилитель не сможет управлять мощным двигателем и т.д.